







预备知识:
(1) 平面的一般表达式:

其中,n=(A,B,C)是平面的法向量,D决定了平面与原点之间的距离,当D=0时,平面经过原点。
(2) 向量的模(长度):
给定一个向量V=(x,y,z),则

(3) 向量的点积(内积):
给定两个向量


点到直线的距离公式推导:

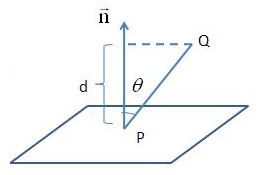
参考博客:http://www.cnblogs.com/graphics/archive/2010/07/10/1774809.html
预备知识:
(1) 平面的一般表达式:
其中,n=(A,B,C)是平面的法向量,D决定了平面与原点之间的距离,当D=0时,平面经过原点。
(2) 向量的模(长度):
给定一个向量V=(x,y,z),则
(3) 向量的点积(内积):
给定两个向量
点到直线的距离公式推导:
参考博客:http://www.cnblogs.com/graphics/archive/2010/07/10/1774809.html
 2167
2167

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言
























