







实验现象:
检测到有火源报警。
理论学习:
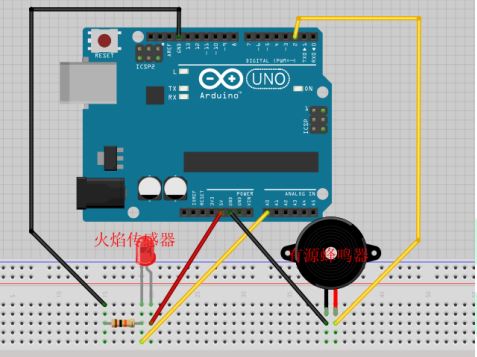
远红外火焰传感器可以用来探测火源或者其他一些波长在700纳米~1000纳米范围内的热源。在机器人比赛中远红外火焰探头起着非常重要的作用,它可以用作机器人的眼睛来寻找火源或足球。利用它可以制作灭火机器人、足球机器人等。
远红外火焰传感器能够探测到波长在700纳米~1000纳米范围内的红外光,探测角度为60°,其中红外波长在880纳米附近时,其灵敏度达到最大。远红外火焰探头将外界红外光的强弱变化转化为电流的变化,通过A/D转换器反映为0~1023范围内数值的变化。外界红外光越强,数值越小;红外光越弱,数值越大。
程序代码:
#define ADpin A0
#define Buzzer 2
int ADBuffer = 0;
void setup()
{
pinMode(Buzzer,OUTPUT);
Serial.begin(9600);
}
void loop()
{
ADBuffer = analogRead(ADpin); //读AD值
Serial.print("AD = ");
Serial.println(ADBuffer);
if(ADBuffer > 20) //当AD值大于设定值时候
{
digitalWrite(Buzzer,HIGH); //蜂鸣器报警
}
else
{
digitalWrite(Buzzer,LOW); //蜂鸣器取消报警
}
delay(500); //延时500ms
}















 292
292

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









