







一、L298N电机驱动模块有什么用?
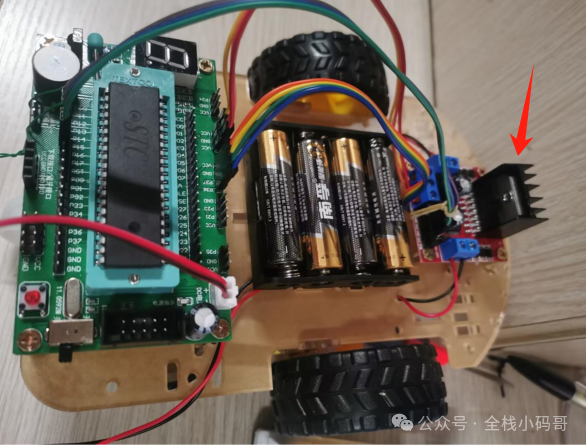
我们在做单片机智能循迹小车的时候,经常看到上面有一个L298N电机驱动模块一端连接着小车的电机,另一端连接着单片机的IO口。
那为什么没有直接用单片机的IO口控制电机呢?
其中一个原因就是单片机输出的功率较小,不足以驱动电机工作。这时候就需要外接一个驱动模块,这个驱动模块工作电压高、输出电流大、驱动能力强、发热量低、输出功率高等优点,单片机的IO口只需要控制这个驱动模块的工作,即可实现小功率控制大功率的效果。这种方法与继电器小电流控制大电流很相似。
因此,每当遇到外接设备的工作功率较大,单片机IO口无法直接驱动时,往往都会在中间接一个驱动模块,驱动模块负责输出较大功率来驱动外接设备,单片机IO口负责控制驱动模块。电动小车就是很典型的一个例子:
一个电动小车整体的运行,首先依赖于它的电机驱动模块。电机驱动模块主要功能是驱动小车的电机转动,从而使小车轮子转动,让小车行进。
常用的电机驱动芯片有L297/298 、MC33886 、3L4428等。今天我们主要对L298进行介绍。我们的学习目的就是通过电机驱动模块,驱动电机并且控制电机的转速和正转反转,最终同时驱动两个电机,完成控制小车的轮子转动。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











