









基于多元宇宙算法的柔性车间调度问题求解
摘要:本文主要介绍基于多元宇宙算法的柔性车间调度问题求解
## 1.柔性作业车间调度问题
柔性作业车间调度问题(Flexible Job Shop Scheduling Problem,FJSP),是一种经典的组合优化问题。在FJSP问题中,有多个作业需要在多个机器上进行加工,每个作业由一系列工序组成,每个工序需要在特定的机器上完成。同时,每个机器一次只能处理一个工序,且每个工序的处理时间可能不同。FJSP问题的目标是找到一个最优的作业调度方案,使得所有作业的完成时间最小化。这个问题的难点在于需要考虑到多个作业,多个机器和多个工序之间的复杂关系,并且需要在有限的时间内找到最优解。
柔性作业车间调度问题( FJSP)的描述如下:n个工件
{
J
,
J
2
,
.
.
,
J
n
}
\left\{J, J_2, . ., J_n\right\}
{J,J2,..,Jn} 要在
m
m
m 台机器
{
M
1
,
M
2
,
.
.
,
M
m
}
\left\{M_1, M_2, . ., M_m\right\}
{M1,M2,..,Mm} 上加工。每个工件包含一道或多道工序,工序顺序是预先确定的,每道工序可以在多台不同加工机器上进行加工,工序的加工时间随加工机器的不同而不同。调度目标是为每道工序选择最合适的机器,确定每台机器上各个工序的最佳加工顺序以及开工时间,使整个系统的某些性能指标达到最优。因此,柔性作业车间调度问题包含两个子问题:确定各工件的加工机器(机器选择子问题)和确定各个机器上的加工先后顺序(工序排序子问题)。
此外,在加工过程中还需要满足下面的约束条件 Q :
(1)同一台机器同一时刻只能加工一个工件;
(2)同一工件的同一道工序在同一时刻只能被一台机器加工;
(3)每个工件的每道工序一旦开始加工不能中断;
(4)不同工件之间具有相同的优先级;
(5)不同工件的工序之间没有先后约束,同一工件的工序之间有先后约束;
(6)所有工件在零时刻都可以被加工。
1.1 约束条件
C 1 : s j h + x i j h × p i j h ≤ c j h C_1: s_{j h}+x_{i j h} \times p_{i j h} \leq c_{j h} C1:sjh+xijh×pijh≤cjh
其中: i = 1 , … , m ; j = 1 , … , n ; h = 1 , … , h j i=1, \ldots, m ; j=1, \ldots, n ; h=1, \ldots, h_j i=1,…,m;j=1,…,n;h=1,…,hj
C 2 : c j h ≤ s j ( h + 1 ) C_2: c_{j h} \leq s_{j(h+1)} C2:cjh≤sj(h+1)
其中: j = 1 , … , n ; h = 1 , … , h j − 1 j=1, \ldots, n ; h=1, \ldots, h_j-1 j=1,…,n;h=1,…,hj−1
C 3 : c j h j ≤ C max C_3: c_{j h_j} \leq C_{\max } C3:cjhj≤Cmax
其中: j = 1 , … , n j=1, \ldots, n j=1,…,n
C 4 : s j h + p i j h ≤ s k l + L ( 1 − y i j h k l ) C_4: s_{j h}+p_{i j h} \leq s_{k l}+L\left(1-y_{i j h k l}\right) C4:sjh+pijh≤skl+L(1−yijhkl)
其中: j = 0 , … , n ; k = 1 , … , n ; h = 1 , … , h j ; l = 1 , … , h k ; i = 1 , … , m j=0, \ldots, n ; k=1, \ldots, n ; h=1, \ldots, h_j ; l=1, \ldots, h_k ; i=1, \ldots, m j=0,…,n;k=1,…,n;h=1,…,hj;l=1,…,hk;i=1,…,m
C 5 : c j h ≤ s j ( h + 1 ) + L ( 1 − y i k l j ( h + 1 ) ) C_5: c_{j h} \leq s_{j(h+1)}+L\left(1-y_{i k l j(h+1)}\right) C5:cjh≤sj(h+1)+L(1−yiklj(h+1))
其中:
j
=
1
,
…
,
n
;
k
=
0
,
…
,
n
;
h
=
1
,
…
,
h
j
−
1
;
l
=
1
,
…
,
h
k
;
i
=
1
,
…
,
m
j=1, \ldots, n ; k=0, \ldots, n ; h=1, \ldots, h_j-1 ; \quad l=1, \ldots, h_k ; \quad i=1, \ldots, m
j=1,…,n;k=0,…,n;h=1,…,hj−1;l=1,…,hk;i=1,…,m
h
1
:
∑
i
=
1
m
j
h
x
i
j
h
=
1
h_1: \sum_{i=1}^{m_{j h}} x_{i j h}=1
h1:∑i=1mjhxijh=1
其中:
h
=
1
,
…
,
h
j
;
j
=
1
,
…
,
n
h=1, \ldots, h_j ; j=1, \ldots, n
h=1,…,hj;j=1,…,n ;
h 2 : ∑ j = 1 n ∑ h = 1 h j y i j h k l = x i k l h_2: \sum_{j=1}^n \sum_{h=1}^{h_j} y_{i j h k l}=x_{i k l} h2:j=1∑nh=1∑hjyijhkl=xikl
其中: i = 1 , … , m ; k = 1 , … , n ; l = 1 , … , h k i=1, \ldots, m ; k=1, \ldots, n ; l=1, \ldots, h_k i=1,…,m;k=1,…,n;l=1,…,hk
h 3 : ∑ i = 1 n ∑ i = 1 n k y i j h k l = x i j h h_3: \sum_{i=1}^n \sum_{i=1}^{n_k} y_{i j h k l}=x_{i j h} h3:i=1∑ni=1∑nkyijhkl=xijh
其中: i = 1 , … , m ; j = 1 , … , n ; h = 1 , … , h k i=1, \ldots, m ; j=1, \ldots, n ; \quad h=1, \ldots, h_k i=1,…,m;j=1,…,n;h=1,…,hk
C 6 : s j h ≥ 0 , c j h ≥ 0 C_6: s_{j h} \geq 0, c_{j h} \geq 0 C6:sjh≥0,cjh≥0
其中:
j
=
0
,
1
,
…
,
n
;
h
=
1
,
…
,
h
j
j=0,1, \ldots, n ; h=1, \ldots, h_j
j=0,1,…,n;h=1,…,hj
C
1
C_1
C1 和
C
2
C_2
C2 表示每一个工件的工序先后顺序约束;
C
3
C_3
C3 表示工件的完工时间的约束,即每一个工件的完工时间不可能超过总的完工时间;
C
4
C_4
C4 和
C
5
C_5
C5 表示同一时刻同一台机器只能加工一道工序;
h
1
h_1
h1 表示机器约束,即同一时刻同一道工序只能且仅能被一台机器加工;
h
2
h_2
h2 和
h
3
h_3
h3 表示存在每一台机器上可以存在循环操作;
C
6
C_6
C6 表示各个参数变量必须是正数。
n
n
n :工件总数;
m
m
m :机器总数;
i
,
e
i, e
i,e :机器序号,
i
,
e
=
1
,
2
,
3
,
…
,
m
i, e=1,2,3, \ldots, m
i,e=1,2,3,…,m ;
j
,
k
:
j, k:
j,k: 工件序号,
j
,
k
=
1
,
2
,
3
,
…
,
n
;
h
j
j, k=1,2,3, \ldots, n ; h_j
j,k=1,2,3,…,n;hj :工件
j
j
j 的工序总数;
h
,
l
:
h, l:
h,l: 工序序号,
h
=
1
,
2
,
3
,
…
,
h
j
h=1,2,3, \ldots, h_j
h=1,2,3,…,hj ;
Ω
j
h
\Omega_{j h}
Ωjh :工件
j
j
j 的第
h
h
h 道工序的可选加工机器集;
m
j
h
m_{j h}
mjh :工件
j
j
j 的第
h
h
h 道工序的可选加工机器数;
O
j
h
O_{j h}
Ojh :工件
j
j
j 的第
h
h
h 道工序;
M
i
j
h
M_{i j h}
Mijh :工件
j
j
j 的第
h
h
h 道工序在机器
i
i
i 上加工;
p
i
j
h
p_{i j h}
pijh :工件
j
j
j 的第
h
h
h 道工序在机器
i
i
i 上的加工时间;
s
j
h
s_{j h}
sjh :工件
j
j
j 的第
h
h
h 道工序加工开始时间;
c
j
h
c_{j h}
cjh :工件
j
j
j 的第
h
h
h 道工序加工完成时间;
d
j
d_j
dj :工件
j
j
j 的交货期;
L
L
L :一个足够大的正数;
C
j
C_j
Cj :每个工件的完成时间;
C
max
C_{\text {max }}
Cmax :最大完工时间;
T
o
:
T
o
=
∑
j
=
1
n
h
j
T_o: T_o=\sum_{j=1}^n h_j
To:To=∑j=1nhj ,所有工件工序总数;
x
i
j
h
=
{
1
,
如果工序
O
j
h
选择机器
i
;
0
,
否则;
x_{i j h}=\left\{\begin{array}{l}1, \text { 如果工序 } O_{j h} \text { 选择机器 } i ; \\ 0, \text { 否则;}\end{array}\right.
xijh={1, 如果工序 Ojh 选择机器 i;0, 否则;
y
i
j
h
k
l
=
{
1
,
如果
O
i
j
h
先于
O
i
k
l
加工;
0
,
否则;
y_{i j h k l}=\left\{\begin{array}{l}1, \text { 如果 } O_{i j h} \text { 先于 } O_{i k l} \text { 加工;} \\ 0, \text { 否则;}\end{array}\right.
yijhkl={1, 如果 Oijh 先于 Oikl 加工;0, 否则;
1.2约束条件
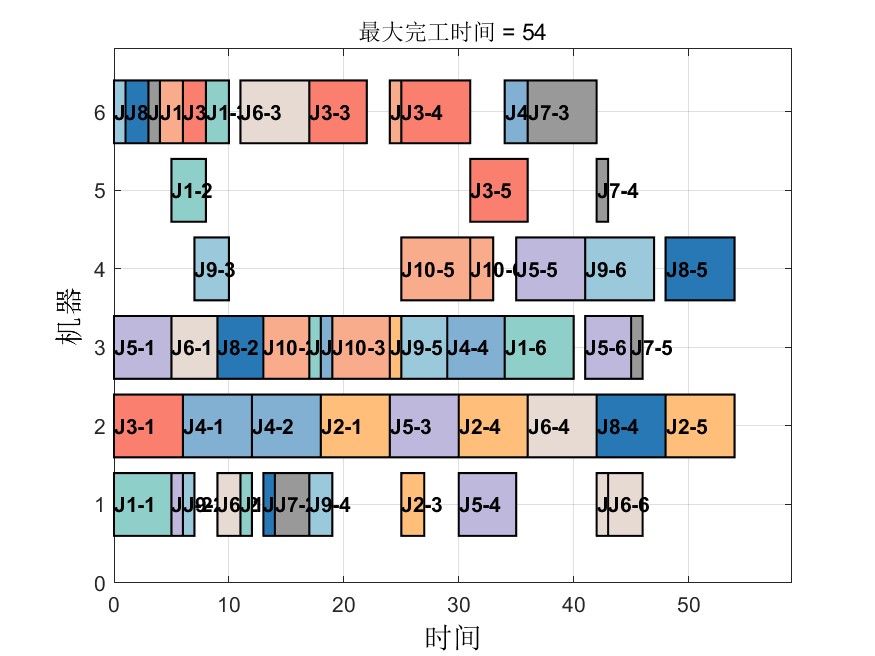
FJSP的目标函数是最大完工时间最小。完工时间是每个工件最后一道工序完成的时间,其中最大的那个时间就是最大完工时间 (makespan)。它是衡量调度方案的最根本指标,主要体现车间的生产效率,如下式所示:
f = min ( max 1 ≤ j ≤ n ( C j ) ) f=\min \left(\max _{1 \leq j \leq n}\left(C_j\right)\right) f=min(1≤j≤nmax(Cj))
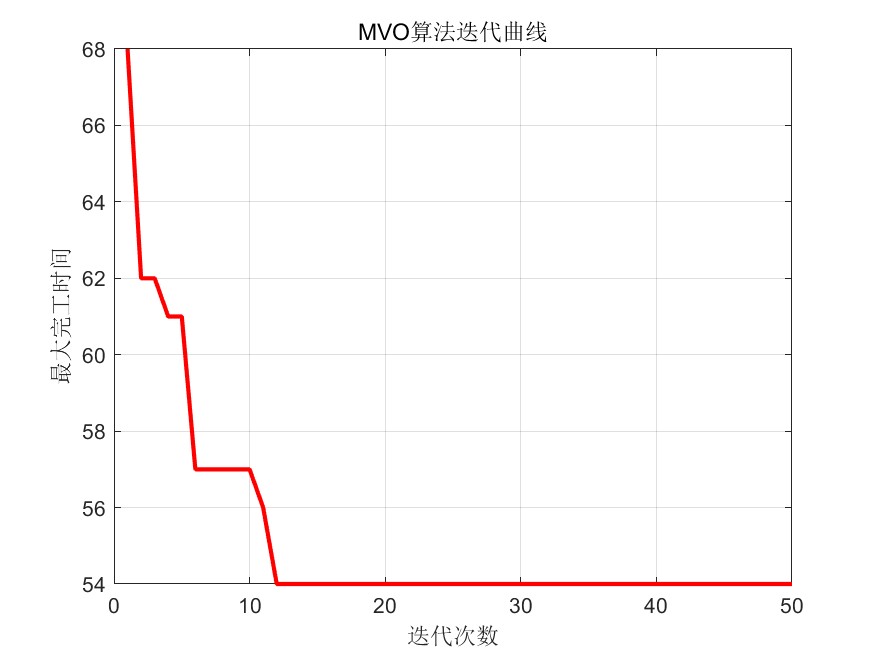
2.多元宇宙算法
多元宇宙算法原理请参考:https://blog.csdn.net/u011835903/article/details/107785205
3.实验案例及结果
本文采用Brandimarte 数据集进行测试
Brandimarte 数据集是柔性作业车间调度问题(FJSP)中的一个经典数据集,用于研究和测试各种调度算法。该数据集包含了多个工件和机器的调度信息,旨在优化生产线上的任务顺序,以达到最小化完成时间、最大化效率或最小化成本等目标。Brandimarte 数据集的格式如下:第一行包含至少两个数字:第一个数字表示工件数,第二个数字表示机器数,第三个数字表示每道工序平均可有几台机器加工。接下来的每一行表示一个工件的各工序可用机器情况。




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











