







最近在看recast&detour源码的时候有遇到许多数学上的算法问题,特此记录,以便以后查看。
重心坐标系介绍
看懂中文维基百科的第一段。https://zh.wikipedia.org/wiki/%E9%87%8D%E5%BF%83%E5%9D%90%E6%A0%87
三角形重心坐标推导
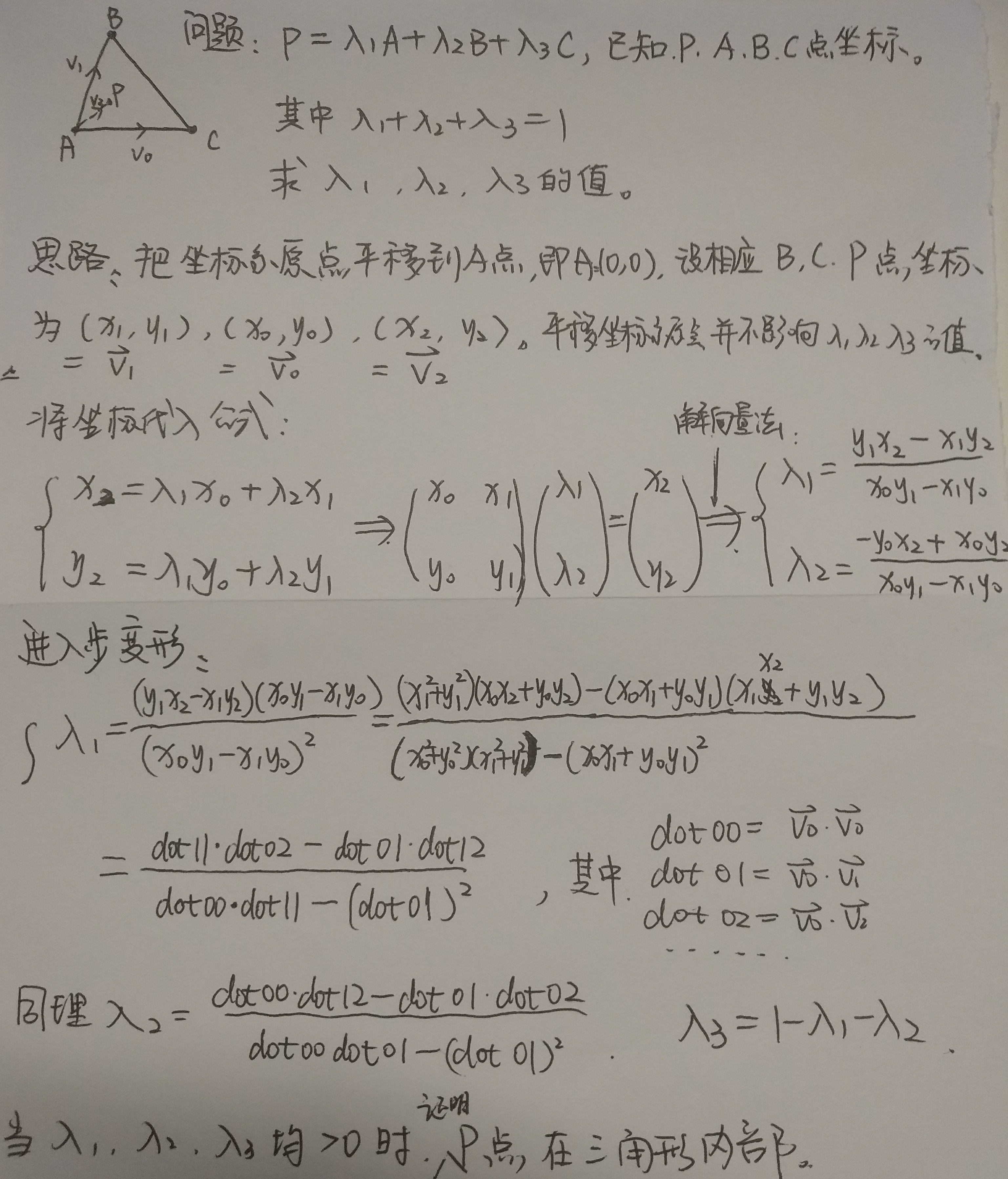
源码
使用上面推导的公式计算系数是否大于等于0.
bool dtClosestHeightPointTriangle(const float* p, const float* a, const float* b, const float* c, float& h)
{
float v0[3], v1[3], v2[3];
dtVsub(v0, c,a);
dtVsub(v1, b,a);
dtVsub(v2, p,a);
const float dot00 = dtVdot2D(v0, v0);
const float dot01 = dtVdot2D(v0, v1);
const float dot02 = dtVdot2D(v0, v2);
const float dot11 = dtVdot2D(v1, v1);
const float dot12 = dtVdot2D(v1, v2);
// Compute barycentric coordinates
const float invDenom = 1.0f / (dot00 * dot11 - dot01 * dot01);
const float u = (dot11 * dot02 - dot01 * dot12) * invDenom;
const float v = (dot00 * dot12 - dot01 * dot02) * invDenom;
// The (sloppy) epsilon is needed to allow to get height of points which
// are interpolated along the edges of the triangles.
static const float EPS = 1e-4f;
// If point lies inside the triangle, return interpolated ycoord.
if (u >= -EPS && v >= -EPS && (u+v) <= 1+EPS)
{
h = a[1] + v0[1]*u + v1[1]*v;
return true;
}
return false;
}参考
https://en.wikipedia.org/wiki/Barycentric_coordinate_system



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











