






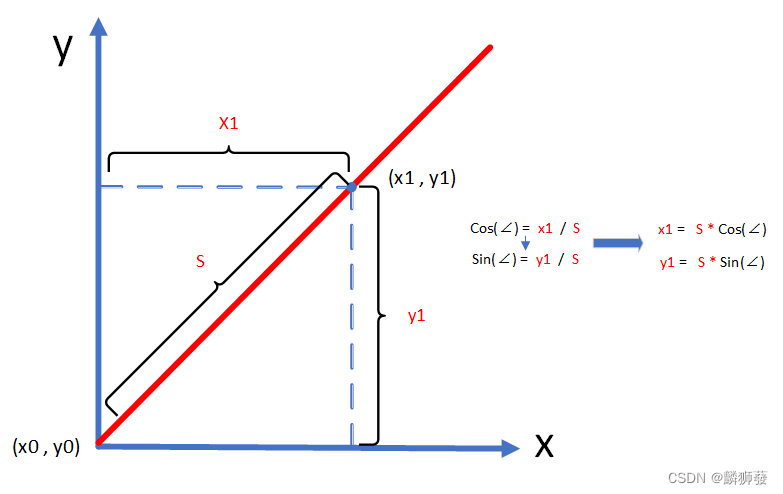
已知角度和距离,计算坐标。公式是x1=x0+s·cosθ,y1=y0+s·sinθ,其中θ为方位角,s为距离。
C语言函数cos()接受一个以弧度为单位的参数 ,并返回一个double类型的值。
cos()返回的值始终在-1到1之间。
#include “stdio.h”
#include “math.h”
#define PI 3.141592654
int main(int argc, char* argv[])
{
double arg = 60, result;
// 转换成弧度
arg = (arg * PI) / 180;
result = cos(arg);
printf(“cos %.2lf 余弦值= %.2lf\r\n”, arg, result);
return 0;
}

















 1305
1305

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









