









1.算法原理
SAD(Sum of absolute differences)是一种图像匹配算法。基本思想:差的绝对值之和。此算法常用于图像块匹配,将每个像素对应数值之差的绝对值求和,据此评估两个图像块的相似度。该算法快速、但并不精确,通常用于多级处理的初步筛选。
2.基本流程
输入:两幅图像,一幅Left-Image,一幅Right-Image
对左图,依次扫描,选定一个锚点:
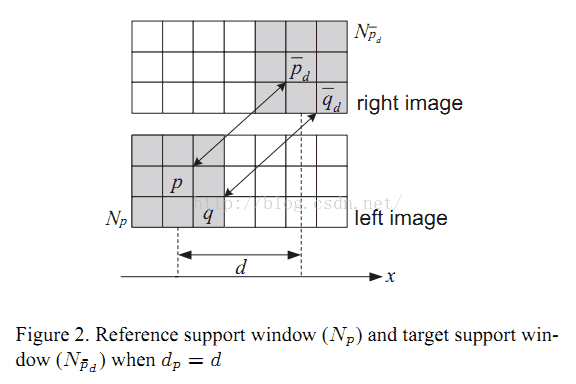
(1)构造一个小窗口,类似于卷积核;
(2)用窗口覆盖左边的图像,选择出窗口覆盖区域内的所有像素点;
(3)同样用窗口覆盖右边的图像并选择出覆盖区域的像素点;
(4)左边覆盖区域减去右边覆盖区域,并求出所有像素点灰度差的绝对值之和;
(5)移动右边图像的窗口,重复(3)-(4)的处理(这里有个搜索范围,超过这个范围跳出);
(6)找到这个范围内SAD值最小的窗口,即找到了左图锚点的最佳匹配的像素块。
参考代码:SAD.h
#include"iostream"
#include"opencv2/opencv.hpp"
#include"iomanip"
using namespace std;
using namespace cv;
class SAD
{
public:
SAD():winSize(7),DSR(30){}
SAD(int _winSize,int _DSR):winSize(_winSize),DSR(_DSR){}
Mat computerSAD(Mat &L,Mat &R); //计算SAD
private:
int winSize; //卷积核的尺寸
int DSR; //视差搜索范围
};
Mat SAD::computerSAD(Mat &L,Mat &R)
{
int Height=L.rows;
int Width=L.cols;
Mat Kernel_L(Size(winSize,winSize),CV_8U,Scalar::all(0));
Mat Kernel_R(Size(winSize,winSize),CV_8U,Scalar::all(0));
Mat Disparity(Height,Width,CV_8U,Scalar(0)); //视差图
for(int i=0;i<Width-winSize;i++) //左图从DSR开始遍历
{
for(int j=0;j<Height-winSize;j++)
{
Kernel_L=L(Rect(i,j,winSize,winSize));
Mat MM(1,DSR,CV_32F,Scalar(0)); //
for(int k=0;k<DSR;k++)
{
int x=i-k;
if(x>=0)
{
Kernel_R=R(Rect(x,j,winSize,winSize));
Mat Dif;
absdiff(Kernel_L, Kernel_R, Dif);//
Scalar ADD=sum(Dif);
float a=ADD[0];
MM.at<float>(k)=a;
}
}
Point minLoc;
minMaxLoc(MM, NULL, NULL,&minLoc,NULL);
int loc=minLoc.x;
//int loc=DSR-loc;
Disparity.at<char>(j,i)=loc*16;
}
double rate=double(i)/(Width);
cout<<"已完成"<<setprecision(2)<<rate*100<<"%"<<endl; //处理进度
}
return Disparity;
}// MySAD.cpp : 定义控制台应用程序的入口点。
//
#include "stdafx.h"
#include"SAD.h"
int _tmain(int argc, _TCHAR* argv[])
{
Mat Img_L=imread("imL.png",0);
Mat Img_R=imread("imR.png",0);
Mat Disparity; //视差图
//SAD mySAD;
SAD mySAD(7,30);
Disparity=mySAD.computerSAD(Img_L,Img_R);
imshow("Img_L",Img_L);
imshow("Img_R",Img_R);
imshow("Disparity",Disparity);
waitKey();
return 0;
}
更多资源:http://blog.csdn.net/tulun/article/details/6456188
http://blog.csdn.net/chenyusiyuan/article/details/5967291















 4705
4705

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









