







 本文详细介绍了PyTorch中`Tensor.backward`函数的工作原理,特别是当输入和输出为标量或向量时的计算。它涉及到Jacobian矩阵的概念以及vector-Jacobian积的计算方法,并通过实例展示了如何理解和应用这些概念。此外,文章还讨论了当gradient参数为向量时的情况,以及输入和输出的维度匹配规则。
本文详细介绍了PyTorch中`Tensor.backward`函数的工作原理,特别是当输入和输出为标量或向量时的计算。它涉及到Jacobian矩阵的概念以及vector-Jacobian积的计算方法,并通过实例展示了如何理解和应用这些概念。此外,文章还讨论了当gradient参数为向量时的情况,以及输入和输出的维度匹配规则。
目录
前言
torch版本为v1.13。
backward函数官方文档
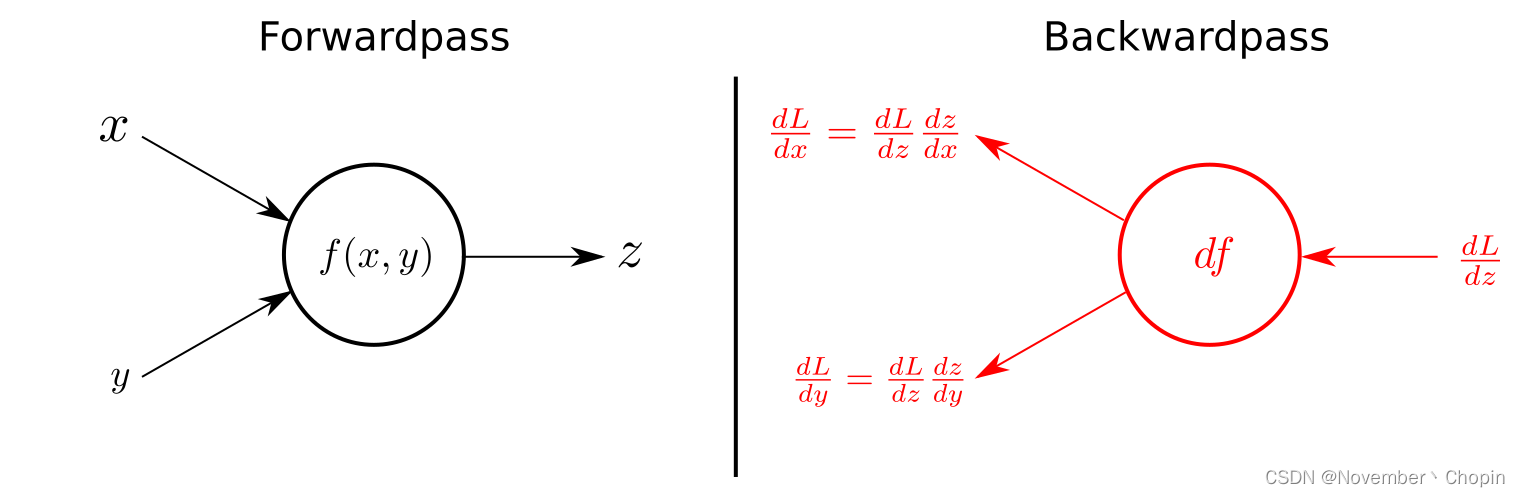
torch.Tensor.backward:计算当前tensor相对于图的叶子的梯度。
叶子可以理解为自己创建的变量。使用链式法则,图是可微的。如果张量不是标量,并且需要梯度,该函数还需要指定gradient。它应该是匹配类型和位置的tensor,包含微分函数相对于self的梯度(???)。
这个函数在叶子中累计梯度,在调用它之前,可能需要将.grad属性归零或将它们设置为 None 。
参数:
- gradient (Tensor or None) – 关于tensor的梯度。如果它是一个tensor,会自动转为不需要grad的Tensor,除非
create_graph为True。None值可以指定为标量Tensor或不需要grad的Tensor。如果None值是可接受的,那么该参数是可选参数。 - retain_graph (bool, optional) – 如果为False,用于计算grads的graph将被释放。注意,在几乎所有情况下,都不需要将此选项设置为 True,而且通常可以以更有效的方式解决。 默认为 create_graph 的值。
- create_graph (bool, optional) – 默认为False。如果为True,导数的图将会被构建,允许计算更高阶的导数衍生品(derivative products)。
- inputs (sequence of Tensor) – 将梯度累积到inputs 的
.grad中。其他的Tensors将会被忽略。如果未提供,则梯度将累积到用于计算 attr::tensors 的所有叶张量中。
backward理解
Jacobian矩阵
参考:wolfram-Jacobian
设
x
=
(
x
1
,
x
2
,
⋯
,
x
n
)
T
\bold{x}=(x_1,x_2,\cdots,x_n)^T
x=(x1,x2,⋯,xn)T,
y
=
f
(
x
)
\bold{y}=f(\bold{x})
y=f(x),则有:
y
=
[
y
1
y
2
⋮
y
m
]
=
[
f
1
(
x
)
f
2
(
x
)
⋮
f
m
(
x
)
]
=
[
f
1
(
x
1
,
x
2
,
⋯
,
x
n
)
f
2
(
x
1
,
x
2
,
⋯
,
x
n
)
⋮
f
m
(
x
1
,
x
2
,
⋯
,
x
n
)
]
\bold{y}= \begin{bmatrix} y_1 \\ y_2 \\ \vdots \\ y_m \\ \end{bmatrix}= \begin{bmatrix} f_1(\bold{x}) \\ f_2(\bold{x}) \\ \vdots \\ f_m(\bold{x}) \\ \end{bmatrix}= \begin{bmatrix} f_1(x_1,x_2,\cdots,x_n) \\ f_2(x_1,x_2,\cdots,x_n) \\ \vdots \\ f_m(x_1,x_2,\cdots,x_n) \\ \end{bmatrix}
y=
y1y2⋮ym
=
f1(x)f2(x)⋮fm(x)
=
f1(x1,x2,⋯,xn)f2(x1,x2,⋯,xn)⋮fm(x1,x2,⋯,xn)
,则
y
\bold{y}
y 关于
x
\bold{x}
x 的梯度是一个雅可比矩阵:
J
(
x
1
,
x
2
,
⋯
,
x
n
)
=
∂
(
y
1
,
⋯
,
y
m
)
∂
(
x
1
,
⋯
,
x
n
)
=
[
∂
y
1
∂
x
1
∂
y
1
∂
x
2
⋯
∂
y
1
∂
x
n
∂
y
2
∂
x
1
∂
y
2
∂
x
2
⋯
∂
y
2
∂
x
n
⋮
⋮
⋱
⋮
∂
y
m
∂
x
1
∂
y
m
∂
x
2
⋯
∂
y
m
∂
x
n
]
J(x_1,x_2,\cdots,x_n) = {\frac {\partial(y_1,\cdots,y_m)} {\partial(x_1,\cdots,x_n)}}= \begin{bmatrix} \frac{\partial y_{1}}{\partial x_{1}} & \frac{\partial y_{1}}{\partial x_{2}} & \cdots &\frac{\partial y_{1}}{\partial x_{n}} \\ \frac{\partial y_{2}}{\partial x_{1}}& \frac{\partial y_{2}}{\partial x_{2}} & \cdots & \frac{\partial y_{2}}{\partial x_{n}}\\ \vdots &\vdots & \ddots & \vdots \\ \frac{\partial y_{m}}{\partial x_{1}}& \frac{\partial y_{m}}{\partial x_{2}} &\cdots & \frac{\partial y_{m}}{\partial x_{n}} \end{bmatrix}
J(x1,x2,⋯,xn)=∂(x1,⋯,xn)∂(y1,⋯,ym)=
∂x1∂y1∂x1∂y2⋮∂x1∂ym∂x2∂y1∂x2∂y2⋮∂x2∂ym⋯⋯⋱⋯∂xn∂y1∂xn∂y2⋮∂xn∂ym
vector-Jacobian product的计算
参考:
The “gradient” argument in Pytorch’s “backward” function
详解Pytorch 自动微分里的(vector-Jacobian product)-知乎
backward(torch.autograd.backward或Tensor.backward)实现的是vector-Jacobian product,即矢量-雅可比积,Jacobian容易理解,这里的vector(设为 v v v)就是backward的gradient参数,有很多种理解:
- y i y_i yi 对 x i x_i xi 的偏导数沿 v v v上的投影, v v v的默认方向为 v = ( 1 , 1 , ⋯ , 1 ) v=(1,1,\cdots,1) v=(1,1,⋯,1);
- 各个分量函数关于 x i x_i xi偏好的权重
值得注意的是, v v v 的维度与输出保持一致,可正可负。
所以,vector-Jacobian product的形式为:
v
⋅
J
=
[
v
1
,
v
2
,
⋯
,
v
m
]
⋅
[
∂
y
1
∂
x
1
∂
y
1
∂
x
2
⋯
∂
y
1
∂
x
n
∂
y
2
∂
x
1
∂
y
2
∂
x
2
⋯
∂
y
2
∂
x
n
⋮
⋮
⋱
⋮
∂
y
m
∂
x
1
∂
y
m
∂
x
2
⋯
∂
y
m
∂
x
n
]
=
[
∑
i
=
0
m
∂
y
i
∂
x
1
v
i
,
∑
i
=
0
m
∂
y
i
∂
x
2
v
i
,
⋯
,
∑
i
=
0
m
∂
y
i
∂
x
n
v
i
]
\begin{aligned} \bold{v} \cdot J &= [v_1,v_2,\cdots,v_m]\cdot \begin{bmatrix} \frac{\partial y_{1}}{\partial x_{1}} & \frac{\partial y_{1}}{\partial x_{2}} & \cdots &\frac{\partial y_{1}}{\partial x_{n}} \\ \frac{\partial y_{2}}{\partial x_{1}}& \frac{\partial y_{2}}{\partial x_{2}} & \cdots & \frac{\partial y_{2}}{\partial x_{n}}\\ \vdots &\vdots & \ddots & \vdots \\ \frac{\partial y_{m}}{\partial x_{1}}& \frac{\partial y_{m}}{\partial x_{2}} &\cdots & \frac{\partial y_{m}}{\partial x_{n}} \end{bmatrix}\\ &= \begin{bmatrix} \sum_{i=0}^{m}{\frac {\partial y_i} {\partial x_1}v_i},\,\,\, \sum_{i=0}^{m}{\frac {\partial y_i} {\partial x_2}v_i},\,\,\, \cdots,\,\,\, \sum_{i=0}^{m}{\frac {\partial y_i} {\partial x_n}v_i} \end{bmatrix} \end{aligned}
v⋅J=[v1,v2,⋯,vm]⋅
∂x1∂y1∂x1∂y2⋮∂x1∂ym∂x2∂y1∂x2∂y2⋮∂x2∂ym⋯⋯⋱⋯∂xn∂y1∂xn∂y2⋮∂xn∂ym
=[∑i=0m∂x1∂yivi,∑i=0m∂x2∂yivi,⋯,∑i=0m∂xn∂yivi]
这就是输出进行backward之后,叶子张量的.grad值。
vector-Jacobian product的例子理解
以
y
=
x
2
y=x^2
y=x2为例进行解释:
代码1:
x = torch.tensor([1,2,3.], requires_grad=True)
y = x**2
y.backward(gradient=torch.tensor([1,1,1.]))
print(x.grad)
"""
输出:
tensor([2., 4., 6.])
"""
代码2:
x = torch.tensor([1,2,3.], requires_grad=True)
y = x**2
y.backward(gradient=torch.tensor([10,-10,20.]))
print(x.grad)
"""
输出:
tensor([ 20., -40., 120.])
"""
可以发现,代码2相比于代码1,结果放大了gradient倍。设上述代码中的 x = ( x 1 , x 2 , x 3 ) \bold{x}=(x_1,x_2,x_3) x=(x1,x2,x3),则 y = ( y 1 , y 2 , y 3 ) = ( x 1 2 , x 2 2 , x 3 2 ) \bold{y}=(y_1,y_2,y_3)=(x_1^2,x_2^2,x_3^2) y=(y1,y2,y3)=(x12,x22,x32),gradient为 v = ( v 1 , v 2 , v 3 ) \bold{v}=(v_1,v_2,v_3) v=(v1,v2,v3)。使用vector-Jacobian product公式可得:
v ⋅ J = [ v 1 , v 2 , v 3 ] [ ∂ y 1 ∂ x 1 ∂ y 1 ∂ x 2 ∂ y 1 ∂ x n ∂ y 2 ∂ x 1 ∂ y 2 ∂ x 2 ∂ y 2 ∂ x n ∂ y 3 ∂ x 1 ∂ y 3 ∂ x 2 ∂ y 3 ∂ x n ] = [ ∑ i = 0 3 ∂ y i ∂ x 1 v i , ∑ i = 0 3 ∂ y i ∂ x 2 v i , ∑ i = 0 3 ∂ y i ∂ x 3 v i ] = [ 2 x 1 v 1 , 2 x 2 v 2 , 2 x 3 v 3 ] = [ 2 v 1 , 4 v 2 , 6 v 3 ] \begin{aligned} \bold{v} \cdot J &= [v_1,v_2,v_3] \begin{bmatrix} \frac{\partial y_{1}}{\partial x_{1}} & \frac{\partial y_{1}}{\partial x_{2}} &\frac{\partial y_{1}}{\partial x_{n}} \\ \frac{\partial y_{2}}{\partial x_{1}}& \frac{\partial y_{2}}{\partial x_{2}} & \frac{\partial y_{2}}{\partial x_{n}}\\ \frac{\partial y_{3}}{\partial x_{1}}& \frac{\partial y_{3}}{\partial x_{2}} & \frac{\partial y_{3}}{\partial x_{n}} \end{bmatrix}\\ &= \begin{bmatrix} \sum_{i=0}^{3}{\frac {\partial y_i} {\partial x_1}v_i},\,\,\, \sum_{i=0}^{3}{\frac {\partial y_i} {\partial x_2}v_i},\,\,\, \sum_{i=0}^{3}{\frac {\partial y_i} {\partial x_3}v_i} \end{bmatrix} \\ &=\begin{bmatrix}2x_1v_1,2x_2v_2,2x_3v_3\end{bmatrix} \\ &=\begin{bmatrix}2v_1,4v_2,6v_3\end{bmatrix} \end{aligned} v⋅J=[v1,v2,v3] ∂x1∂y1∂x1∂y2∂x1∂y3∂x2∂y1∂x2∂y2∂x2∂y3∂xn∂y1∂xn∂y2∂xn∂y3 =[∑i=03∂x1∂yivi,∑i=03∂x2∂yivi,∑i=03∂x3∂yivi]=[2x1v1,2x2v2,2x3v3]=[2v1,4v2,6v3]
分别将 v = ( 1 , 1 , 1. ) \bold{v}=(1,1,1.) v=(1,1,1.) 和 v = ( 10 , − 10 , 20. ) \bold{v}=(10,-10,20.) v=(10,−10,20.) 带入可得代码结果。
输入和输出为标量或向量时的计算
输入为标量,输出为标量
代码:
x = torch.tensor(2., requires_grad=True)
y = x**2+x
y.backward(gradient=torch.tensor(1.))
print(x.grad)
"""
输出:
tensor([5.])
"""
解释:
x
=
x
1
\bold{x}=x_1
x=x1,则
y
=
y
1
=
x
1
2
+
x
1
\bold{y}=y_1=x_1^2+x_1
y=y1=x12+x1,gradient为
v
=
v
1
\bold{v}=v_1
v=v1,则:
v
⋅
J
=
[
v
1
]
⋅
[
∂
y
1
∂
x
1
]
=
[
v
1
]
⋅
[
2
x
1
+
1
]
=
[
1
]
⋅
[
2
×
2
+
1
]
=
5
\begin{aligned} \bold{v} \cdot J &= [v_1]\cdot[\frac {\partial y_1} {\partial x_1}]\\ &=[v_1]\cdot[2x_1+1]\\ &=[1]\cdot[2\times2+1]\\ &=5 \end{aligned}
v⋅J=[v1]⋅[∂x1∂y1]=[v1]⋅[2x1+1]=[1]⋅[2×2+1]=5
输入为标量,输出为向量
代码:
x = torch.tensor(1., requires_grad=True)
y = torch.empty(2)
y[0] = x**2
y[1] = x**3
y.backward(gradient=torch.tensor([1,2.]))
print(x.grad)
"""
输出:
tensor(8.)
"""
解释:
x
=
x
1
\bold{x}=x_1
x=x1,则
y
=
[
y
1
,
y
2
]
=
[
x
1
2
,
x
1
3
]
\bold{y}=[y_1,y_2]=[x_1^2,x_1^3]
y=[y1,y2]=[x12,x13],gradient为
v
=
[
v
1
,
v
2
]
\bold{v}=[v_1,v_2]
v=[v1,v2],则:
v
⋅
J
=
[
v
1
,
v
2
]
⋅
[
∂
y
1
∂
x
1
∂
y
2
∂
x
1
]
=
[
v
1
,
v
2
]
⋅
[
2
x
1
3
x
1
2
]
=
[
1
,
2
]
⋅
[
2
3
]
=
8
\begin{aligned} \bold{v} \cdot J &= [v_1,v_2]\cdot \begin{bmatrix} \frac {\partial y_1} {\partial x_1} \\ \frac {\partial y_2} {\partial x_1} \end{bmatrix}\\ &= [v_1,v_2]\cdot \begin{bmatrix} 2x_1 \\ 3x_1^2 \end{bmatrix}\\ &= [1,2]\cdot \begin{bmatrix} 2 \\ 3 \end{bmatrix}\\ &=8 \end{aligned}
v⋅J=[v1,v2]⋅[∂x1∂y1∂x1∂y2]=[v1,v2]⋅[2x13x12]=[1,2]⋅[23]=8
输入为向量,输出为标量
代码:
x = torch.tensor([1.,2,3], requires_grad=True)
y = torch.sum(x**2)
y.backward()
print(x.grad)
"""
输出:
tensor([2., 4., 6.])
"""
解释:
x
=
[
x
1
,
x
2
,
x
3
]
\bold{x}=[x_1,x_2,x_3]
x=[x1,x2,x3],则
y
=
y
1
=
x
1
2
+
x
2
2
+
x
3
2
\bold{y}=y_1=x_1^2+x_2^2+x_3^2
y=y1=x12+x22+x32,gradient为
v
=
[
v
1
]
\bold{v}=[v_1]
v=[v1],则:
v
⋅
J
=
[
v
1
]
⋅
[
∂
y
1
∂
x
1
∂
y
1
∂
x
2
∂
y
1
∂
x
3
]
=
[
v
1
]
⋅
[
2
x
1
2
x
2
2
x
3
]
=
[
1
]
⋅
[
2
4
6
]
=
[
2
4
6
]
\begin{aligned} \bold{v} \cdot J &= [v_1]\cdot \begin{bmatrix} \frac {\partial y_1} {\partial x_1} & \frac {\partial y_1} {\partial x_2} & \frac {\partial y_1} {\partial x_3} \end{bmatrix}\\ &= [v_1]\cdot \begin{bmatrix} 2x_1 & 2x_2 & 2x_3 \end{bmatrix}\\ &= [1]\cdot \begin{bmatrix} 2&4&6 \end{bmatrix}\\ &= \begin{bmatrix} 2&4&6 \end{bmatrix}\\ \end{aligned}
v⋅J=[v1]⋅[∂x1∂y1∂x2∂y1∂x3∂y1]=[v1]⋅[2x12x22x3]=[1]⋅[246]=[246]
输入为标量,输出为向量
参见上一节 vector-Jacobian product的例子理解。
额外例子:输出为标量,gradient为向量
在上一节的例子中,gradient的维度与输出维度保持一致,本节探索gradient的维度与输出维度不一致的情况。
输入为标量,输出为标量,gradient为向量
x = torch.tensor(2., requires_grad=True)
y = x**2+x
y.backward(gradient=torch.tensor([1.,10]))
print(x.grad)
结果:报错
RuntimeError: Mismatch in shape: grad_output[0] has a shape of torch.Size([4]) and output[0] has a shape of torch.Size([]).
输入为向量,输出为标量,gradient为向量
x = torch.tensor([1.,2,3], requires_grad=True)
y = torch.sum(x**2)
y.backward(gradient=torch.tensor([1,2.]))
print(x.grad)
结果:报错
RuntimeError: Mismatch in shape: grad_output[0] has a shape of torch.Size([2]) and output[0] has a shape of torch.Size([]).
总结
- gradient默认为1,其维度应与输出维度保持一致;
- gradient类似于在梯度前面乘以一个动量,类似于学习率,不过可正可负(个人理解);
■ \blacksquare ■

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









