







1. 分析理解
万向节长什么样子,请参考这篇文章中的图片:https://zhuanlan.zhihu.com/p/42519819。
看了很多篇解释性的文章,没怎么看懂。因为我个人最关注的问题点在于:
现实物体旋转为什么没有所谓的万向节锁的bug,而搞了个万向节就出了这种bug?这很反直觉。
答案是,只是因为万向节这个工具有bug,不是现实世界有bug。 这是把简单问题复杂化了。
现实世界中,我们想把一个物体摆一个姿态,其实就是先按某个轴旋转a°,再按某个轴旋转b°,最后按某个轴旋转c°。用大脑去想象的话,很简单,完全不会有问题。因为这种思考方式下,我们认为坐标轴/旋转轴是不变的,只有物体在变换姿态。就像是在3ds max或者blender里面旋转物体一样。
但是如果要用机械部件去真正的控制物体的姿态,一般就是用万向节这种机械部件,它本身有bug。为什么,因为万向节的旋转方向之间是有连接的,连接就是限制。在万向节的限制下,想要旋转物体到一定姿态,如果还按照先转a,再转b,最后转c,最后可能在某个位置卡住了,无法按照某个轴旋转。这种状态就是“万向节”锁住了。卡住的位置是在两个或者多个旋转平面重合的时候,就会消失一个旋转自由度。
数学上,使用欧拉角这种数学计算过程去旋转物体,和万向节是一样的,都会出现万向节锁的问题。使用欧拉角怎么计算旋转?就是使用矩阵。计算过程参考文章:欧拉角旋转。
产生万向节锁的本质原因是什么?使用万向节或欧拉角旋转物体的时候,TMD旋转轴也会跟着转,这就麻烦了,如果两个旋转轴重合,那就少了一个自由度,也就是某个方向转不动了。如果只转一个轴,用欧拉角矩阵来旋转物体,没有问题。谁知道多个轴复合起来计算,就不是自由旋转了,而是万向节旋转,就出现问题了。看了其他高手文章才知道,万向节旋转是以自身坐标系的坐标轴为轴进行旋转,旋转时,非旋转轴会跟着转,这样讲就更好理解了。
2. 直观演示
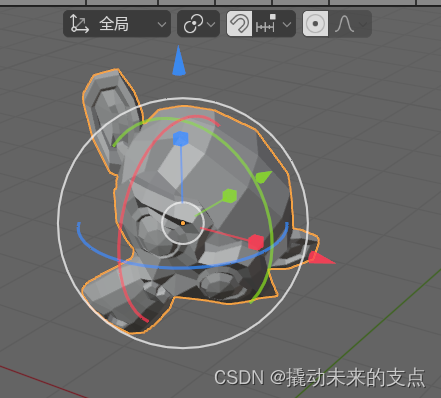
在blender里面选择全局操作模式,和万向节操作模式,可以看到不同的地方在于,全局模式下,有几个弯弯的曲线表示的平面和坐标轴都是不变的,两两垂直。
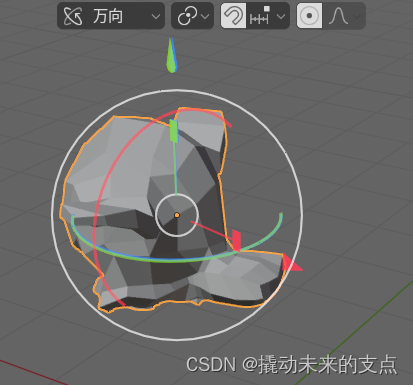
而在万向节操作模式下,旋转轴间的相对夹角,几个弯弯的曲线表示的平面都是在变的。如果某一时刻两个轴重合,我们就缺少一个可以操作的旋转轴了。
全局模式下,猴头歪了,坐标轴没变:
万向节模式下,如果旋转轴会动,重合时就产生了一个方向锁:
既然欧拉角旋转有万向节锁的问题,那么为什么,还要用它呢?正是因为它的旋转轴可以变换位置,旋转起来比较灵活。
3. 深度思考
既然欧拉角旋转不是自由旋转,那用什么工具来表示自由旋转呢?一种方案是使用四元数,这个我们后面再学习吧。



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











