







本文主要还是就SNX倾角开关的蓝牙操作使用方法进行详细讲解,主要关于如何使用湾流蓝牙助手进行SNX倾角开关的配置与角度数据查询操作。以下是步骤。
1、微信搜索“湾流蓝牙助手”小程序

2、打开“湾流蓝牙助手”后,就会进入到“蓝牙搜索界面”。如果传感器已经上电,那么搜索列表中就会出现"BT_"开头的设备。

注意事项:如果操作过程中遇到问题,请检查设备是否正常上电,手机蓝牙是否已经打开,微信蓝牙权限是否已经打开。
3、点击“BT_”开头的设备,进入到“数据显示与配置”主界面,这个界面会实时刷新SNX倾角传感器的角度数据,主要有Roll/Pitch/Yaw(横滚角、俯仰角、航向角),角速度(绕X/Y/Z轴旋转的三个角速度),轴面角(X、Y轴相对水平面的角度),二面角(Z轴法平面与水平面的夹角,俗称坡度角)。

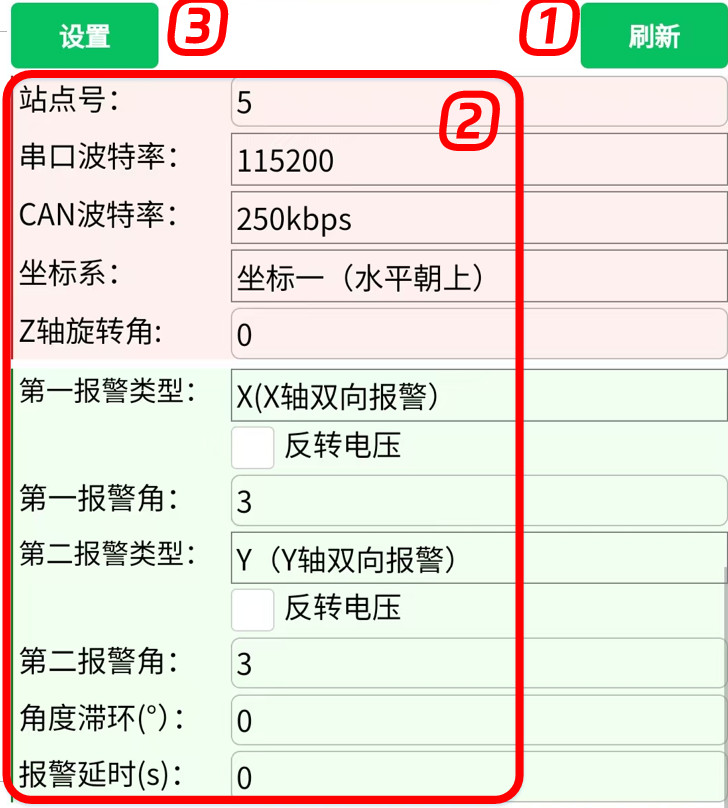
4、在“参数配置”界面,用户可以对坐标系、报警类型、报警角度、报警延时进行修改。特别需要注意的是,每次进入参数配置界面显示的参数并不是传感器的内部参数,需要点“刷新”按钮来读取传感器内部的参数。
正确的修改参数配置的方法如下:
1、进入参数配置界面,点击【刷新】按钮,刷新传感器内部最新参数信息。
2、修改坐标系、Z轴旋转角、报警类型、报警角度、角度滞环、报警延时等参数。
3、点击【设置】按钮,这些参数将会发送给传感器,并在传感器内部进行保存。
4、再次点击【刷新】按钮,刷新传感器内部最新参数信息,确认是否是您想要的参数。
如何使用蓝牙进行传感器的校零和预设角度操作
1、校零操作
将传感器放置于水平面上,通过点击【校零】按钮,可以将角度值归零。请不要在大角度位置,强行将传感器归零。(比如在30°位置,将传感器传感器数值归零)
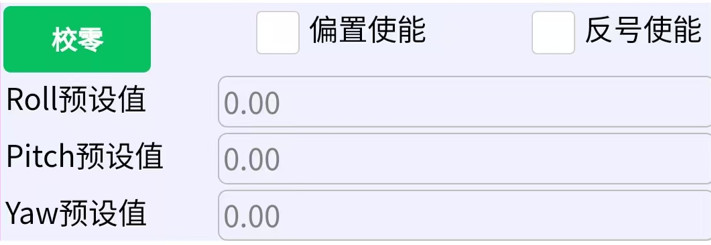
2、预设角度
传感器在大角度位置时的预设角度操作是非常有用的。比如传感器安装在挖掘机机械臂上(安装于挖掘机侧面),建议修改坐标系为【坐标五】,采集Roll角作为挖掘机机械臂的角度值。但是Roll的显示角度(比如35°)可能与挖机实际角度(77°)有差别。这时候就可以勾选【偏置使能】,将【Roll角预设值】修改为77°,点击【设置】按钮。就可以让传感器Roll角显示为挖机实际角度77°。

















 1984
1984

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









