







Summary of Visual Object Tracking using Adaptive Correlation Filters
David S. Bolme J. Ross Beveridge Bruce A. Draper Yui Man Lui
Summarize by Wenju Huang
Abstract
This paper present a novel tracking method that make correlation operation between input image f and filter h , desiring that the result of the correlation is a Gaussian shaped peak centered on the target area in the input f. This method is called Correlation Filter based tracking.
1. Motivation
1) A number of robust tracking strategies such as IVT, Frag Track, GBDL, MILTrack, is effective, but time consume(25 to 30 frames per second).
2) The ASEF, UMACE is robust and better in discriminating, but they have been trained offline.
2. Pre knowledge
1) What is correlation operation?

Correlation operation is used to analyze two signal’s correlation, which called cross-correlation, or one signal’s correlation of itself, which called auto-correlative. The higher correlative of two signal or one signal itself leads to the large correlation coefficient.
3. Main Idea
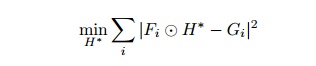
The main idea in this paper is to find a filter h, which have a high correlation with the target area in the input image, and low correlation with the background. So, when take correlation operation between the h and f, we can get a result that have the high respond on the
target center and low respond on the other area.
Correlation operation in the spatial domain is equivalent to the element-wise multiplication in the Fourier domain, which imply that we can use the FFT to create a fast tracker.
goal function:

4. Main Working
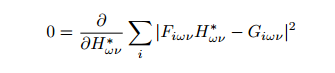
The main working in this paper is find a appropriate filer h that can maps an input to the desired output. The algorithm using in this paper to create the h is called MOSSE(Minimum Output Sum of Squared Error), which find a filter by minimizing the sum of squared error between the actual output of convolution and the desired output of convolution. This minimization problem takes the form:
Then we set the partial W.R.T. H*wv equal to zero, while treating Hwvas an independent variable.
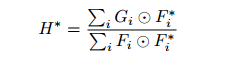
solve the above equation we can get the filter
However, during tracking, a target can often change its appearance . Therefore, we need to adapt the filter quickly to follow objects. The MOSSE is adapted as:
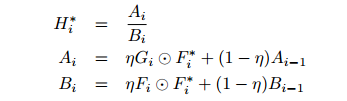
where η is the learning rate.
5. The Algorithm
6. References
(1)http://www.cs.colostate.edu/~vision/publications/bolme_cvpr10.pdf
(2)http://www.cnblogs.com/hanhuili/p/4266990.html















 2563
2563

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









