







import numpy as np
import tensorflow as tf
import matplotlib.pyplot as plt
from tensorflow.examples.tutorials.mnist import input_data
from tensorflow.models.rnn import rnn, rnn_cell
mnist = input_data.read_data_sets('data/', one_hot=True)
train_img = mnist.train.images
train_lbl = mnist.train.labels
test_img = mnist.test.images
test_lbl = mnist.test.labels
dim_input = 28
dim_hidden = 128
dim_output = 10
nsteps = 28
weights = {'i2h' : tf.Variable(tf.random_normal([dim_input, dim_hidden], stddev=0.1)),
'fc' : tf.Variable(tf.random_normal([dim_hidden, dim_output], stddev=0.1))}
bias = {'i2h' : tf.Variable(tf.random_normal([dim_hidden], stddev=0.1)),
'fc' : tf.Variable(tf.random_normal([dim_output], stddev=0.1))}
def _rnn(_x, _init_state, _w, _b, _nstep):
# (batch_size, nsteps, dim_input) -> (nsteps, batch_size, dim_input)
# each time step input : (batch_size, dim_input)
_x = tf.transpose(_x, [1, 0, 2])
#(nsteps*batch_size, dim_input)
_x = tf.reshape(_x, [-1, dim_input])
#input 2 hiddenlayer embedding?
# _h = tf.matmul(_x, _w['i2h']) + _b['i2h']
_h = _x
_h_split = tf.split(0, _nstep, _h)
with tf.variable_scope('RNN'):
lstm_cell = rnn_cell.BasicLSTMCell(dim_hidden, forget_bias=1.0)
_lstm_o, _lstm_s = rnn.rnn(lstm_cell, _h_split, initial_state=_init_state)
_o = tf.matmul(_lstm_o[-1], _w['fc']) + _b['fc']
return {
'x':_x, 'h':_h, 'hsplit':_h_split,
'lstm_o': _lstm_o, 'lstm_s':_lstm_s, 'o': _o }
x = tf.placeholder(tf.float32, [None, nsteps, dim_input], name='input')
y = tf.placeholder(tf.float32, [None, dim_output], name='output')
init_state = tf.placeholder(tf.float32, [None, 2*dim_hidden])
rnn_mnist = _rnn(x, init_state, weights, bias, nsteps)
score = rnn_mnist['o']
state_final = rnn_mnist['lstm_s']
loss = tf.reduce_mean(tf.nn.softmax_cross_entropy_with_logits(score, y))
lr = 0.001
optimizer = tf.train.AdamOptimizer(lr).minimize(loss)
# optimizer = tf.train.GradientDescentOptimizer(lr).minimize(loss)
pred = tf.equal(tf.argmax(score, 1), tf.argmax(y,1))
acc = tf.reduce_mean(tf.cast(pred, tf.float32))
init = tf.initialize_all_variables()
epoch = 20
batch_size = 100
snapshot = 5
save_step = 1
saver = tf.train.Saver()
sess = tf.Session()
sess.run(init)
loss_cache = []
acc_cache = []
state = np.zeros([batch_size, 2*dim_hidden])
for ep in xrange(epoch):
num_batch = mnist.train.num_examples/batch_size
avg_loss, avg_acc = 0, 0
for nb in xrange(num_batch):
batch_x, batch_y = mnist.train.next_batch(batch_size)
batch_x = batch_x.reshape(batch_size, nsteps, dim_input)
out = sess.run([optimizer, acc, loss, state_final], feed_dict={x:batch_x, y:batch_y, init_state: state})
# state = out[3]
avg_loss += out[2]/num_batch
avg_acc += out[1]/num_batch
loss_cache.append(avg_loss)
acc_cache.append(avg_acc)
if ep % snapshot ==0:
print 'Epoch: %d, loss: %.4f, acc: %.4f'%(ep, avg_loss, acc_cache[-1])
test_img = test_img.reshape(-1, nsteps, dim_input)
# print test_img.shape
# print test_lbl.shape
# print 'test accuracy:' , sess.run(acc, {x:test_img, y:test_lbl, init_state: np.zeros([test_img.shape[0], 2*dim_hidden])})
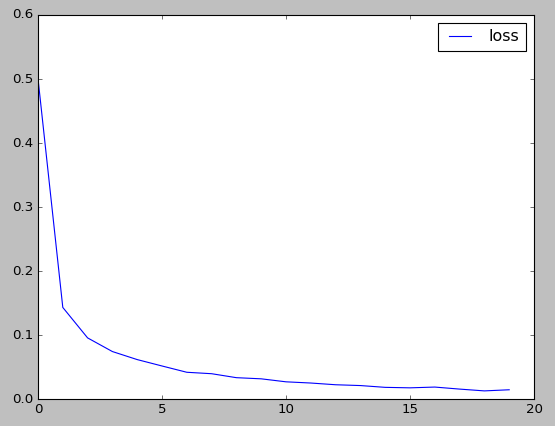
plt.figure(1)
plt.plot(range(len(loss_cache)), loss_cache, 'b-', label='loss')
plt.legend(loc = 'upper right')
plt.figure(2)
plt.plot(range(len(acc_cache)), acc_cache, 'o-', label='acc')
plt.legend(loc = 'lower right')
plt.show()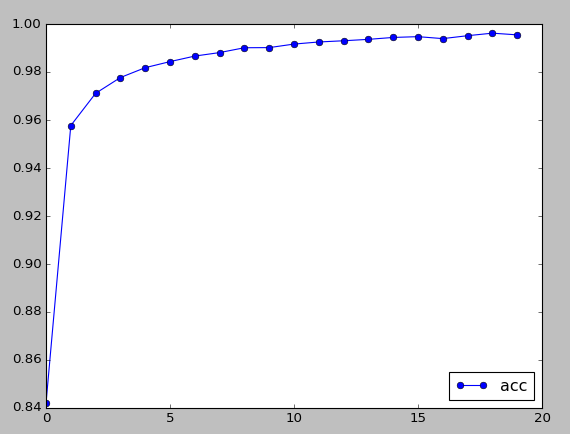















11-06
 2295
2295
2295

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









