







 这篇博客详细介绍了八数码问题的解决方案,通过宽度优先搜索(BFSearch)算法实现。文章包含结构体定义、节点扩展、随机地图生成、目标检测等功能函数的代码示例,并在主函数中演示了搜索过程及结果输出。
这篇博客详细介绍了八数码问题的解决方案,通过宽度优先搜索(BFSearch)算法实现。文章包含结构体定义、节点扩展、随机地图生成、目标检测等功能函数的代码示例,并在主函数中演示了搜索过程及结果输出。
相关代码要感谢网上的一些大神给予的分享
程序思路
结构体map
用来作为一个结点的数据结构。
struct Map
{
int cell[N][N];//数码数组
Direction BelockDirec;//操作符方向
struct Map * Parent;//父节点
};
PrintMap
用来打印一个结点
void PrintMap(struct Map *map)
{
cout<<"*************************************************"<<endl;
for(int i=0;i<N;i++)
{
for(int j=0;j<N;j++)
{
cout<<map->cell[i][j]<<" ";
}
cout<<endl;
}
cout<<"*************************************************"<<endl;
}
MoveMap
函数用来扩展一个结点的后继结点(上、下、左、右)
struct Map * MoveMap(struct Map * map,Direction Direct,bool CreateNewMap)
{
struct Map * NewMap;
//获取空闲格位置i,j
int i,j;
for(i = 0; i < N; i++)
{
bool HasGetBlankCell = false;
for(j = 0; j < N; j++)
{
if(map->cell[i][j] == 0)
{
HasGetBlankCell = true;
break;
}
}
if(HasGetBlankCell)
break;
}
//移动数字,t_i,t_j为移动后0的坐标
int t_i = i,t_j = j;
bool AbleMove = true;
switch(Direct)
{
case Down:
t_i++;
if(t_i >= N)
AbleMove=false;
break;
case Up:
t_i--;
if(t_i < 0)
AbleMove=false;
break;
case Left:
t_j--;
if(t_j < 0)
AbleMove=false;
break;
case Right:
t_j++;
if(t_j >= N)
AbleMove=false;
break;
};
if(!AbleMove)//不可以移动则返回原节点
{
return map;
}
if(CreateNewMap)
{
NewMap = new Map();
for(int x = 0; x < N; x++)
for(int y = 0; y < N; y++)
NewMap->cell[x][y] = map->cell[x][y];
}
else
NewMap = map;
/*移动即交换0与相应数字的位置*/
NewMap->cell[i][j] = NewMap->cell[t_i][t_j];
NewMap->cell[t_i][t_j] = 0;
return NewMap;
}
RandomMap
函数用来随机产生beginMap
struct Map * RandomMap() //随机产生八数码数组
{
int a[9];
struct Map * NewMap;
NewMap = new Map();
srand((unsigned)time(0));
for(int k = 0; k < 9; k++)
{
bool Isre = false;
a[k] = rand()%9;
for (int l = 0; l < k; l++)
{
if (a[k] == a[l])
{
Isre = true;
break;
}
}
if(Isre)
{
k = k - 1;
continue;
}
}
for(int i = 0; i < N; i++)
{
for (int j = 0; j < N; j++)
{
NewMap->cell[i][j] = a[i*3+j];
}
}
NewMap->Parent = NULL;
NewMap->BelockDirec = None;
return NewMap;
}
IsSuccess
函数用来判断某节点是否为目标结点
bool IsSuccess(struct Map * map,struct Map * Target)
{
bool IsSuc = true;
for(int i = 0; i < N; i++)
{
for(int j = 0; j < N; j++)
{
if(map->cell[i][j] != Target->cell[i][j])
{
IsSuc = false;
break;
}
}
if(!IsSuc)
break;
}
return IsSuc;
}
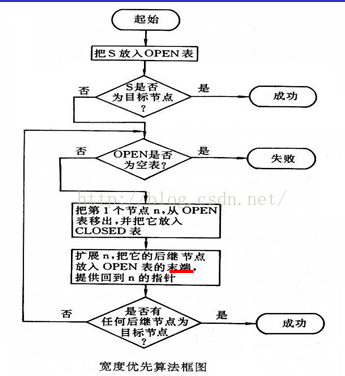
BNF_Search
用来进行宽度搜索(按照以下的流程)
因为CLOSED表是只进不出的,所以这里省略了CLOSED表,用P1保存CLOSED表中的最新结点。而OPEN表是一个队列,先进先出。程序是以链表作为数据结构的,而不是数组。所以可以通过指针回溯
//把begin结点放入OPEN表中
struct Map * p1, *p2, *p=NULL;//p1为要进入closed表中的结点,p2为p1扩展的结点,p为等于结果的结点
bool IsSucc = false;
queue<struct Map *> Queue;
if(IsSuccess(begin,Target))
return begin;
Queue.push(begin);
//begin是否为目标结点
if(IsSuccess(begin,Target))
return begin;
//OPEN表是否为空表,或是否已经找到结果
while(!Queue.empty() || p == NULL);
//把第一个结点从OPEN表中移出,放入CLOSED表中(即p1中)
p1 = Queue.front(); //返回queue中的第一个元素
Queue.pop();
//扩展当前结点
for (int i = 1; i <= 4; i++)
{
Direction Direct=(Direction)i;
if(Direct == p1->BelockDirec)//跳过屏蔽方向,因为里面保存了之前前进的方向,防止回退
continue;
p2 = MoveMap(p1,Direct,true);//p2为扩展的的结点
//如果可以扩展成功(即可以移动)则设置方向和父节点指针
if(p2 != p1)//数码是否可以移动
{
p2->Parent = p1;
switch(Direct)//设置屏蔽方向,防止往回推
{
case Up:
p2->BelockDirec = Down;
break;
case Down:
p2->BelockDirec = Up;
break;
case Left:
p2->BelockDirec = Right;
break;
case Right:
p2->BelockDirec = Left;
break;
}
//判断后继结点是否为目标结点,如果不是则将后继结点放入OPEN表中并循环从OPEN表中pop,如果是则返回当前结点
if (IsSuccess(p2,Target))
{
p = p2;
return p;
}
Queue.push(p2);
n++;
HasResult
函数返回一个结点逆序数的奇偶性用来判断八数码是否可以后的结果
如果奇偶相同说明有解,否则无解
int HasResult(struct Map *map) //返回逆序数的奇偶用来判断是否有解
{
int a=0;
char b[9];
//把map二维表变为数组
for(int i=0;i<N;i++)
{
for(int j=0;j<N;j++)
b[i*3+j]=map->cell[i][j];
}
for(i=0;i<9;i++)
{
for(int j=0;j<i;j++)
{
if((b[j]<b[i])&&b[j]!=0)
a++;
}
}
return a%2;
}
Main函数
随机生成begin结点,并定义target结点
定义a1,a2用来记录begin和target逆序数的奇偶性用以判断是否有解
int a1,a2;
Map Target;
Map *begin,*T;
begin=new Map;
//设定目标图 [1 2 3],[8 0 4],[7 6 5]
Target.cell[0][0] = 1;
Target.cell[0][1] = 2;
Target.cell[0][2] = 3;
Target.cell[1][0] = 8;
Target.cell[1][1] = 0;
Target.cell[1][2] = 4;
Target.cell[2][0] = 7;
Target.cell[2][1] = 6;
Target.cell[2][2] = 5;
begin = RandomMap();
cout<<"目标图:"<<endl;
PrintMap(&Target);
cout<<"起始图:"<<endl;
PrintMap(begin);
a1=HasResult(&Target);
a2=HasResult(begin);
if(a1!=a2)
cout<<"无解"<<endl;
如果有解则进行BNF搜索并打印结果:
else
{
double start=clock();
cout<<"有解"<<endl;
//图搜索
T=BNF_Search(begin,&Target);
//打印
if(T != NULL)
{
//把路径倒序
Map *p=T;
stack<Map *> result_Stack1; //栈,先进后出
while(p->Parent != NULL)
{
result_Stack1.push(p);
p = p->Parent;
}
cout<<"搜索结果:"<<endl;
while(!result_Stack1.empty())
{
PrintMap(result_Stack1.top());
c++;
result_Stack1.pop();//删除
}
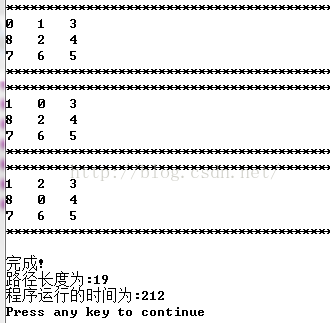
cout<<"\n完成!"<<endl;
cout<<"路径长度为:"<<c<<endl;
double end=clock();
cout<<"程序运行的时间为:"<<end-start<<endl;
}
}
程序测试
有解:
无解:















 1366
1366

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









