







Enabling and Disabling a Device
A device can be considered enabled when the _ _LINK_STATE_START flag is set in net_device->state. The flag is normally set when the device is opened (dev_open) and cleared when the device is closed (dev_close). While there is a flag that is used to explicitly enable and disable transmission for a device (_ _LINK_STATE_XOFF), there is none to enable and disable reception. That capability is achieved by other means—i.e.,by disabling the device. The status of the _ _LINK_STATE_START flag can be checked with the netif_running function.
Queues
Egress queues are associated directly to devices; Traffic Control (the Quality of Service, or QoS, layer) defines one queue for each device. the kernel keeps track of devices waiting to transmit frames, not the frames themselves. We will also see that not all devices actually use Traffic Control. The situation with ingress queues is a bit more complicated, as we’ll see later.
Notifying the Kernel of Frame Reception: NAPI and netif_rx
there are two ways a Linux driver can notify the kernel about a new frame:
the old function netif_rx
Most Linux device drivers still use this approach.
the NAPI mechanism
drivers/net/tg3.c was the first one to be converted to NAPI.
Introduction to the New API (NAPI)
The main idea behind NAPI is simple: instead of using a pure interrupt-drivenmodel, it uses a mix of interrupts and polling. If new frames are received when the kernel has not finished handling the previous ones yet, there is no need for the driver to generate other interrupts: it is just easier to have the kernel keep processing whatever is in the device input queue (with interrupts disabled for the device), and reenable interrupts once the queue is empty. This way, the driver reaps the advantages of both interrupts and polling:• Asynchronous events, such as the reception of one or more frames, are indicated by interrupts so that the kernel does not have to check continuously if the device’s ingress queue is empty.
• If the kernel knows there is something left in the device’s ingress queue, there is no need to waste time handling interrupt notifications. A simple polling is enough.
From the kernel processing point of view, here are some of the advantages of the NAPI approach:
Reduced load on the CPU (because there are fewer interrupts) .
Given the same workload (i.e., number of frames per second), the load on the CPU is lower with NAPI. This is especially true at high workloads. At low workloads, you may actually have slightly higher CPU usage with NAPI
More fairness in the handling of devices
We will see later how devices that have something in their ingress queues are accessed fairly in a round-robin fashion. This ensures that devices with low traffic can experience acceptable latencies even when other devices are much more loaded.
net_device Fields Used by NAPI
poll
A virtual function used to dequeue buffers from the device’s ingress queue. The queue is a private one for devices using NAPI, and softnet_data->input_pkt_queue for others.
poll_list
List of devices that have new frames in the ingress queue waiting to be processed. These devices are known as being in polling state. The head of the list is softnet_data->poll_list. Devices in this list have interrupts disabled and the kernel is currently polling them.
quota
weight
quota is an integer that represents the maximum number of buffers that can be dequeued by the poll virtual function in one shot. Its value is incremented in units of weight and it is used to enforce some sort of fairness among different devices. Lower quotas mean lower potential latencies and therefore a lower risk of starving other devices. On the other hand, a low quota increases the amount of switching among devices, and therefore overall overhead. For devices associated with non-NAPI drivers, the default value of weight is 64, stored in weight_p at the top of net/core/dev.c. The value of weight_p can be changed via /proc. For devices associated with NAPI drivers, the default value is chosen by the drivers. The most common value is 64, but 16 and 32 are used, too. Its value can be tuned via sysfs.
net_rx_action and NAPI
We already know that net_rx_action is the function associated with the NET_RX_SOFTIRQ flag. For the sake of simplicity, let’s suppose that after a period of very low activity, a few devices start receiving frames and that these somehow trigger the execution of net_rx_action—how they do so is not important for now
net_rx_action browses the list of devices in polling state and calls the associated poll virtual function for each device to process the frames in the ingress queue. I explained earlier that devices in that list are consulted in a round-robin fashion, and that there is a maximum number of frames they can process each time their poll method is invoked. If they cannot clear the queue during their slot, they have to wait for their next slot to continue. This means that net_rx_action keeps calling the poll method provided by the device driver for a device with something in its ingress queue until the latter empties out. At that point, there is no need anymore for polling, and the device driver can re-enable interrupt notifications for the device. It is important to underline that interrupts are disabled only for those devices in poll_list, which applies only to devices that use NAPI and do not share backlog_dev.
net_rx_action limits its execution time and reschedules itself for execution when it passes a given limit of execution time or processed frames; this is enforced to make net_rx_action behave fairly in relation to other kernel tasks. At the same time, each device limits the number of frames processed by each invocation of its poll method to be fair in relation to other devices. When a device cannot clear out its ingress queue, it has to wait until the next call of its poll method
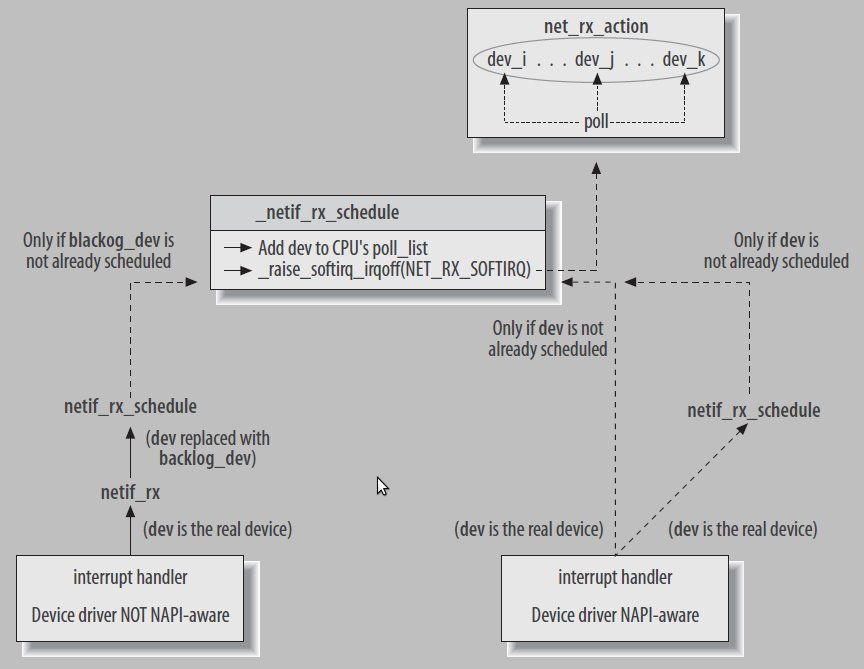
Old Versus New Driver Interfaces
From the device driver perspective, there are only two differences between NAPI and non-NAPI. The first is that NAPI drivers must provide a poll method, The second difference is the function called to schedule a frame: non-NAPI drivers call netif_rx, whereas NAPI drivers call _ _netif_rx_schedule, defined in include/linux/netdevice.h. (The kernel provides a wrapper function named netif_rx_schedule, which checks to make sure that the device is running and that the softirq is not already scheduled, and then it calls _ _netif_rx_schedule. These checks are done with netif_rx_schedule_prep. Some drivers call netif_rx_schedule, and others call netif_rx_schedule_prep explicitly and then _ _netif_rx_schedule if needed).
Manipulating poll_list
We saw in the previous section that any device (including the fake one, backlog_dev) is added to the poll_list list with a call to netif_rx_schedule or _ _netif_rx_schedule.
The reverse operation, removing a device from the list, is done with netif_rx_complete or _ _netif_rx_complete (the second one assumes interrupts are already disabled on the local CPU).
A device can also temporarily disable and re-enable polling with netif_poll_disable and netif_poll_enable, respectively. This does not mean that the device driver has decided to revert to an interrupt-based model. Polling might be disabled on a device,for instance, when the device needs to be reset by the device driver to apply some kind of hardware configuration changes.
I already said that netif_rx_schedule filters requests for devices that are already in the poll_list (i.e., that have the _ _LINK_STATE_RX_SCHED flag set). For this reason, if a driver sets that flag but does not add the device to poll_list, it basically disables polling for the device: the device will never be added to poll_list. This is how netif_poll_disable works: if _ _LINK_STATE_RX_SCHED was not set, it simply sets it and returns. Otherwise, it waits for it to be cleared and then sets it.
static inline void netif_poll_disable(struct net_device *dev)
{
while (test_and_set_bit(_ _LINK_STATE_RX_SCHED, &dev->state)) {
/* No hurry. */
current->state = TASK_INTERRUPTIBLE:
schedule_timeout(1);
}
}
Old Interface Between Device Drivers and Kernel:
First Part of netif_rx
The netif_rx function, defined in net/core/dev.c, is normally called by device drivers when new input frames are waiting to be processed;* its job is to schedule the softirq that runs shortly to dequeue and handle the frames. The figure is practically longer than the code, but it is useful to help understand how netif_rx reacts to its context. netif_rx is usually called by a driver while in interrupt context, but there are exceptions, notably when the function is called by the loopback device. For this reason, netif_rx disables interrupts on the local CPU when it starts, and re-enables them when it finishes.†
When looking at the code, one should keep in mind that different CPUs can run netif_rx concurrently. This is not a problem, since each CPU is associated with a private softnet_data structure that maintains state information. Among other things, the CPU’s softnet_data structure includes a private input queue
This is the function’s prototype:
int netif_rx(struct sk_buff *skb)
Its only input parameter is the buffer received by the device, and the output value is an indication of the congestion level.
• Initializing some of the sk_buff data structure fields (such as the time the frame was received).
• Storing the received frame onto the CPU’s private input queue and notifying the kernel about the frame by triggering the associated softirq NET_RX_SOFTIRQ. This step takes place only if certain conditions are met, the most important of which is whether there is space in the queue.
• Updating the statistics about the congestion level.
Each CPU has its own instance of softnet_data, which includes the private input queue where netif_rx will store ingress frames, and the completion_queue where buffers are sent when they are not needed anymore. an example where CPU1 receives an RxComplete interrupt from eth0. The associated driver stores the ingress frame into CPU 1’s queue. CPU m receives a DMADone interrupt from ethn saying that the transmitted buffer is not needed anymore and can therefore be moved to the completion_queue queue.*
Initial Tasks of netif_rx
netif_rx starts by saving the time the function was invoked (which also represents the time the frame was received) into the stamp field of the buffer structure:
if (skb->stamp.tv_sec == 0)
net_timestamp(&skb->stamp);
Saving the timestamp has a CPU cost—therefore, net_timestamp initializes skb->stamp only if there is at least one interested user for that field. Interest in the field can be advertised by calling net_enable_timestamp.
Do not confuse this assignment with the one done by the device driver right before or after it calls netif_rx:
netif_rx(skb);
dev->last_rx = jiffies;
The device driver stores in the net_device structure the time its most recent frame was received, and netif_rx stores the time the frame was received in the buffer itself. Thus, one timestamp is associated with a device and the other one is associated with a frame. Note, moreover, that the two timestamps use two different precisions. The device driver stores the timestamp of the most recent frame in jiffies, which in kernel 2.6 comes with a precision of 10 or 1 ms, depending on the architecture (for instance, before 2.6, the i386 used the value 10, but starting with 2.6 the value is 1). netif_rx, however, gets its timestamp by calling get_fast_time, which returns a far more precise value.
The ID of the local CPU is retrieved with smp_processor_id( ) and is stored in the local variable this_cpu:
this_cpu = smp_processor_id( );
The local CPU ID is needed to retrieve the data structure associated with that CPU in a per-CPU vector, such as the following code in netif_rx:
queue = &_ _get_cpu_var(softnet_data);
The preceding line stores in queue a pointer to the softnet_data structure associated with the local CPU that is serving the interrupt triggered by the device driver that called netif_rx.
Now netif_rx updates the total number of frames received by the CPU, including both the ones accepted and the ones discarded (because there was no space in the queue, for instance):
netdev_rx_stat[this_cpu].total++
Each device driver also keeps statistics, storing them in the private data structure that dev->priv points to. These statistics, which include the number of received frames, the number of dropped frames, etc., are kept on a per-device basis and the ones updated by netif_rx are on a per-CPU basis.
Managing Queues and Scheduling the Bottom Half
The input queue is managed by softnet_data->input_pkt_queue. Each input queue has a maximum length given by the global variable netdev_max_backlog, whose value is 300. This means that each CPU can have up to 300 frames in its input queue waiting to be processed, regardless of the number of devices in the system.*
Common sense would say that the value of netdev_max_backlog should depend on the number of devices and their speeds. However, this is hard to keep track of in an SMPsystem where the interrupts are distributed dynamically among the CPUs. It is not obvious which device will talk to which CPU. Thus, the value of netdev_max_backlog is chosen through trial and error. In the future, we could imagine it being set dynamically in a manner reflecting the types and number of interfaces. Its value is already configurable by the system administrator. The performance issues are as follows: an unnecessarily large value is a waste of memory, and a slow system may simply never be able to catch up. A value that is too small, on the other hand, could reduce the performance of the device because a burst of traffic could lead to many dropped frames. The optimal value depends a lot on the system’s role (host, server, router, etc.).
In the previous kernels, when the softnet_data per-CPU data structure was not present, a single input queue, called backlog, was shared by all devices with the same size of 300 frames. The main gain with softnet_data is not that n CPUs leave room on the queues for n*300 frames, but rather, that there is no need for locking among CPUs because each has its own queue.
The following code controls the conditions under which netif_rx inserts its new frame on a queue, and the conditions under which it schedules the queue to be run:
if (queue->input_pkt_queue.qlen <= netdev_max_backlog) {
if (queue->input_pkt_queue.qlen) {
if (queue->throttle)
goto drop;
enqueue:
dev_hold(skb->dev);
_ _skb_queue_tail(&queue->input_pkt_queue,skb);
#ifndef OFFLINE_SAMPLE
get_sample_stats(this_cpu);
#endif
local_irq_restore(flags);
return queue->cng_level;
}
if (queue->throttle)
queue->throttle = 0;
netif_rx_schedule(&queue->backlog_dev);
goto enqueue;
}
... ... ...
drop:
_ _get_cpu_var(netdev_rx_stat).dropped++;
local_irq_restore(flags);
kfree_skb(skb);
return NET_RX_DROP;
}
The first if statement determines whether there is space. If the queue is full and the statement returns a false result, the CPU is put into a throttle state, which means that it is overloaded by input traffic and therefore is dropping all further frames. The code instituting the throttle is not shown here, but appears in the following section on congestion management.
If there is space on the queue, however, that is not sufficient to ensure that the frame is accepted. The CPU could already be in the “throttle” state (as determined by the third if statement), in which case, the frame is dropped.
The throttle state can be lifted when the queue is empty. This is what the second if statement tests for. When there is data on the queue and the CPU is in the throttle state, the frame is dropped. But when the queue is empty and the CPU is in the throttle state (which an if statement tests for in the second half of the code shown here), the throttle state is lifted.*
The dev_hold(skb->dev) call increases the reference count for the device so that the device cannot be removed until this buffer has been completely processed. The corresponding decrement, done by dev_put, takes place inside net_rx_action, If all tests are satisfactory, the buffer is queued into the input queue with _ _skb_queue_tail(&queue->input_pkt_queue,skb), the IRQ’s status is restored for the CPU, and the function returns.
Queuing the frame is extremely fast because it does not involve any memory copying, just pointer manipulation. input_pkt_queue is a list of pointers. _ _skb_queue_tail adds the pointer to the new buffer to the list, without copying the buffer.
The NET_RX_SOFTIRQ software interrupt is scheduled for execution with netif_rx_schedule. Note that netif_rx_schedule is called only when the new buffer is added to an empty queue. The reason is that if the queue is not empty, NET_RX_SOFTIRQ has already been scheduled and there is no need to do it again.
Congestion Management
Congestion management is an important component of the input frame-processing task. An overloaded CPU can become unstable and introduce a big latency into the system. For this reason, congestion management mechanisms are needed to make sure the system’s stability is not compromised under high network load. Common ways to reduce the CPU load under high traffic loads include:
Reducing the number of interrupts if possible
This is accomplished by coding drivers either to process several frames with a single interrupt, or to use NAPI.
Discarding frames as early as possible in the ingress path
If code knows that a frame is going to be dropped by higher layers, it can save CPU time by dropping the frame quickly. For instance, if a device driver knew that the ingress queue was full, it could drop a frame right away instead of relaying it to the kernel and having the latter drop it.
The second point is what we cover in this section.
A similar optimization applies to the egress path: if a device driver does not have resources to accept new frames for transmission (that is, if the device is out of memory), it would be a waste of CPU time to have the kernel pushing new frames down to the driver for transmission.
In both cases, reception and transmission, the kernel provides a set of functions to set, clear, and retrieve the status of the receive and transmit queues, which allows device drivers (on reception) and the core kernel (on transmission) to perform the optimizations just mentioned.
A good indication of the congestion level is the number of frames that have been received and are waiting to be processed. When a device driver uses NAPI, it is up to the driver to implement any congestion control mechanism. This is because ingress frames are kept in the NIC’s memory or in the receive ring managed by the driver, and the kernel cannot keep track of traffic congestion. In contrast, when a device driver does not use NAPI, frames are added to per-CPU queues (softnet_data->input_pkt_queue) and the kernel keeps track of the congestion level of the queues.
the current number of frames in the queue does not necessarily represent the real congestion level. An average queue length is a better guide to the queue’s status. Keeping track of the average keeps the system from wrongly classifying a burst of traffic as congestion. In the Linux network stack, average queue length is reported by two fields of the softnet_data structure, cng_level and avg_blog
Being an average, avg_blog could be both bigger and smaller than the length of input_pkt_queue at any time. The former represents recent history and the latter represents the present situation. Because of that, they are used for two different purposes:
By default, every time a frame is queued into input_pkt_queue, avg_blog is updated and an associated congestion level is computed and saved into cng_level. The latter is used as the return value by netif_rx so that the device driver that called this function is given a feedback about the queue status and can change its behavior accordingly.
• The number of frames in input_pkt_queue cannot exceed a maximum size. When that size is reached, following frames are dropped because the CPU is clearly overwhelmed.
Let’s go back to the computation and use of the congestion level. avg_blog and cng_level are updated inside get_sample_stats, which is called by netif_rx.
At the moment, few device drivers use the feedback from netif_rx. The most common use of this feedback is to update statistics local to the device drivers. For a more interesting use of the feedback, see drivers/net/tulip/de2104x.c: when netif_rx returns NET_RX_DROP, a local variable drop is set to 1, which causes the main loop to start dropping the frames in the receive ring instead of processing them.
So long as the ingress queue input_pkt_queue is not full, it is the job of the device driver to use the feedback from netif_rx to handle congestion. When the situation gets worse and the input queue fills in, the kernel comes into play and uses the softnet_data->throttle flag to disable frame reception for the CPU. (Remember that there is a softnet_data structure for each CPU.)
Congestion Management in netif_rx
Let’s go back to netif_rx and look at some of the code that was omitted from the previous section of this chapter. The following two excerpts include some of the code shown previously, along with new code that shows when a CPU is placed in the throttle state.
if (queue->input_pkt_queue.qlen <= netdev_max_backlog) {
if (queue->input_pkt_queue.qlen) {
if (queue->throttle)
goto drop;
... ... ...
return queue->cng_level;
}
... ... ...
}
if (!queue->throttle) {
queue->throttle = 1;
_ _get_cpu_var(netdev_rx_stat).throttled++;
}
softnet_data->throttle is cleared when the queue gets empty. To be exact, it is cleared by netif_rx when the first frame is queued into an empty queue. It could also happen in process_backlog
Average Queue Length and Congestion-Level Computation
The value of avg_blog and cng_level is always updated within get_sample_stats. The latter can be invoked in two different ways:
• Every time a new frame is received (netif_rx). This is the default.
• With a periodic timer. To use this technique, one has to define the OFFLINE_SAMPLE symbol. That’s the reason why in netif_rx, the execution of get_sample_stats depends on the definition of the OFFLINE_SAMPLE symbol. It is disabled by default.
The first approach ends up running get_sample_stats more often than the second approach under medium and high traffic load.
In both cases, the formula used to compute avg_blog should be simple and quick,
because it could be invoked frequently. The formula used takes into account the
recent history and the present:
new_value_for_avg_blog = (old_value_of_avg_blog + current_value_of_queue_len) / 2
How much to weight the present and the past is not a simple problem. The preceding
formula can adapt quickly to changes in the congestion level, since the past (the
old value) is given only 50% of the weight and the present the other 50%.
get_sample_stats also updates cng_level, basing it on avg_blog through the mapping
shown earlier in Figure 9-4 in Chapter 9. If the RAND_LIE symbol is defined, the
function performs an extra operation in which it can randomly decide to set cng_
level one level higher. This random adjustment requires more time to calculate but,
oddly enough, can cause the kernel to perform better under one specific scenario.
Let’s spend a few more words on the benefits of random lies. Do not confuse this
behavior with Random Early Detection (RED).
In a system with only one interface, it does not really make sense to drop random
frames here and there if there is no congestion; it would simply lower the throughput.
But let’s suppose we have multiple interfaces sharing an input queue and one
device with a traffic load much higher than the others. Since the greedy device fills
the shared ingress queue faster than the other devices, the latter will often find no
space in the ingress queue and therefore their frames will be dropped.* The greedy
device will also see some of its frames dropped, but not proportionally to its load.
When a system with multiple interfaces experiences congestion, it should drop
ingress frames across all the devices proportionally to their loads. The RAND_LIE code
adds some fairness when used in this context: dropping extra frames randomly
should end up dropping them proportionally to the load.
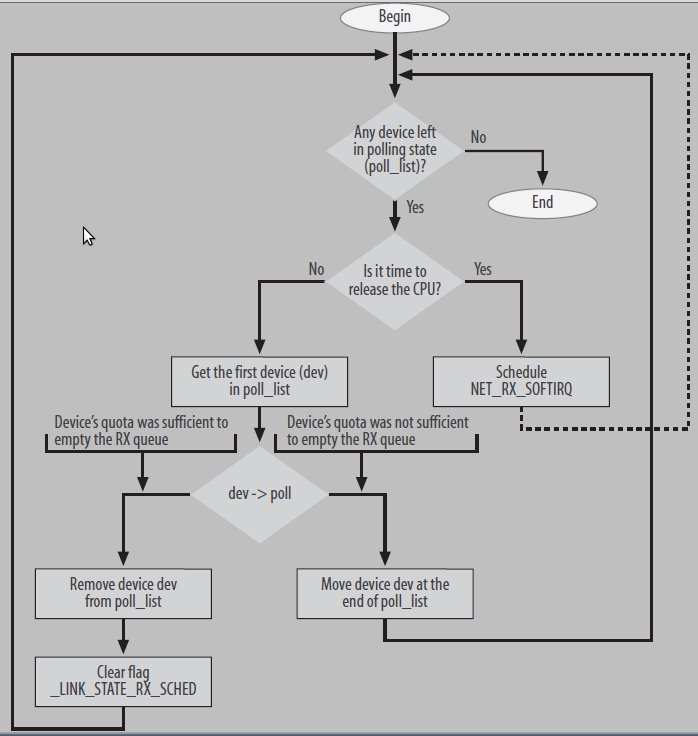
Processing the NET_RX_SOFTIRQ: net_rx_action
net_rx_action is the bottom-half function used to process incoming frames. Its execution
is triggered whenever a driver notifies the kernel about the presence of input
frames. Figure 10-5 shows the flow of control through the function.
Frames can wait in two places for net_rx_action to process them:
A shared CPU-specific queue
Non-NAPI devices’ interrupt handlers, which call netif_rx, place frames into the
softnet_data->input_pkt_queue of the CPU on which the interrupt handlers run.
Device memory
The poll method used by NAPI drivers extracts frames directly from the device
(or the device driver receive rings).
The section “Old Versus New Driver Interfaces” showed how the kernel is notified
about the need to run net_rx_action in both cases.
The job of net_rx_action is pretty simple: to browse the poll_list list of devices that
have something in their ingress queue and invoke for each one the associated poll
virtual function until one of the following conditions is met:
• There are no more devices in the list.
• net_rx_action has run for too long and therefore it is supposed to release the
CPU so that it does not become a CPU hog.
• The number of frames already dequeued and processed has reached a given
upper bound limit (budget). budget is initialized at the beginning of the function
to netdev_max_backlog, which is defined in net/core/dev.c as 300.
As we will see in the next section, net_rx_action calls the driver’s poll virtual function
and depends partly on this function to obey these constraints.
The size of the queue, as we saw in the section “Managing Queues and Scheduling
the Bottom Half,” is restricted to the value of netdev_max_backlog. This value is considered
the budget for net_rx_action. However, because net_rx_action runs with
interrupts enabled, new frames could be added to a device’s input queue while net_
rx_action is running. Thus, the number of available frames could become greater
than budget, and net_rx_action has to take action to make sure it does not run too
long in such cases.
Now we will see in detail what net_rx_action does inside:
static void net_rx_action(struct softirq_action *h)
{
struct softnet_data *queue = &_ _get_cpu_var(softnet_data);
unsigned long start_time = jiffies;
int budget = netdev_max_backlog;
local_irq_disable( );
If the current device has not yet used its entire quota, it is given a chance to dequeue
buffers from its queue with the poll virtual function:
while (!list_empty(&queue->poll_list)) {
struct net_device *dev;
if (budget <= 0 || jiffies - start_time > 1)
goto softnet_break;
local_irq_enable( );
dev = list_entry(queue->poll_list.next, struct net_device, poll_list);
If dev->poll returns because the device quota was not large enough to dequeue all
the buffers in the ingress queue (in which case, the return value is nonzero), the
device is moved to the end of poll_list:
if (dev->quota <= 0 || dev->poll(dev, &budget)) {
local_irq_disable( );
list_del(&dev->poll_list);
list_add_tail(&dev->poll_list, &queue->poll_list);
if (dev->quota < 0)
dev->quota += dev->weight;
else
dev->quota = dev->weight;
} else {
When instead poll manages to empty the device ingress queue, net_rx_action does
not remove the device from poll_list: poll is supposed to take care of it with a call
to netif_rx_complete (_ _netif_rx_complete can also be called if IRQs are disabled on
the local CPU). This will be illustrated in the process_backlog function in the next
section.
Furthermore, note that budget was passed by reference to the poll virtual function;
this is because that function will return a new budget that reflects the frames it processed.
The main loop in net_rx_action checks budget at each pass so that the overall
limit is not exceeded. In other words, budget allows net_rx_action and the poll
function to cooperate to stay within their limit.
dev_put(dev);
local_irq_disable( );
}
}
out:
local_irq_enable( );
return;
This last piece of code is executed when net_rx_action is forced to return while buffers
are still left in the ingress queue. In this case, the NET_RX_SOFTIRQ softirq is scheduled
again for execution so that net_rx_action will be invoked later and will take
care of the remaining buffers:
softnet_break:
_ _get_cpu_var(netdev_rx_stat).time_squeeze++;
_ _raise_softirq_irqoff(NET_RX_SOFTIRQ);
goto out;
}
Note that net_rx_action disables interrupts with local_irq_disable only while
manipulating the poll_list list of devices to poll (i.e., when accessing its softnet_
data structure instance). The netpoll_poll_lock and netpoll_poll_unlock calls, used
by the NETPOLL feature, have been omitted. If you can access the kernel source
code, see net_rx_action in net/core/dev.c for details.
Backlog Processing: The process_backlog Poll Virtual Function
The poll virtual function of the net_device data structure, which is executed by net_
rx_action to process the backlog queue of a device, is initialized by default to
process_backlog in net_dev_init for those devices not using NAPI.
As of kernel 2.6.12, only a few device drivers use NAPI, and initialize dev->poll with
a pointer to a function of its own: the Broadcom Tigon3 Ethernet driver in drivers/
net/tg3.c was the first one to adopt NAPI and is a good example to look at. In this
section, we will analyze the default handler process_backlog defined in net/core/dev.c.
Its implementation is very similar to that of a poll method of a device driver using
NAPI (you can, for instance, compare process_backlog to tg3_poll).
However, since process_backlog can take care of a bunch of devices sharing the
same ingress queue, there is one important difference to take into account. When
process_backlog runs, hardware interrupts are enabled, so the function could be
preempted. For this reason, accesses to the softnet_data structure are always protected
by disabling interrupts on the local CPU with local_irq_disable, especially
the calls to _ _skb_dequeue. This lock is not needed by a device driver using NAPI:*
when its poll method is invoked, hardware interrupts are disabled for the device.
Moreover, each device has its own queue.
Let’s see the main parts of process_backlog. Figure 10-6 shows its flowchart.
The function starts with a few initializations:
static int process_backlog(struct net_device *backlog_dev, int *budget)
{
int work = 0;
int quota = min(backlog_dev->quota, *budget);
struct softnet_data *queue = &_ _get_cpu_var(softnet_data);
unsigned long start_time = jiffies;
Then begins the main loop, which tries to dequeue all the buffers in the input queue
and is interrupted only if one of the following conditions is met:
• The queue becomes empty.
• The device’s quota has been used up.
• The function has been running for too long.
The last two conditions are similar to the ones that constrain net_rx_action. Because
process_backlog is called within a loop in net_rx_action, the latter can respect its
constraints only if process_backlog cooperates. For this reason, net_rx_action passes
its leftover budget to process_backlog, and the latter sets its quota to the minimum
of that input parameter (budget) and its own quota.
budget is initialized by net_rx_action to 300 when it starts. The default value for backlog_
dev->quota is 64 (and most devices stick with the default). Let’s examine a case where
several devices have full queues. The first four devices to run within this function receive
a value of budget greater than their internal quota of 64, and can empty their queues.
The next device may have to stop after sending a part of its queue. That is, the
number of buffers dequeued by process_backlog depends both on the device
configuration (dev->quota), and on the traffic load on the other devices (budget).
This ensures some more fairness among the devices.
for (;;) {
struct sk_buff *skb;
struct net_device *dev;
local_irq_disable( );
skb = _ _skb_dequeue(&queue->input_pkt_queue);
if (!skb)
goto job_done;
local_irq_enable( );
dev = skb->dev;
netif_receive_skb(skb);
dev_put(dev);
work++;
if (work >= quota || jiffies - start_time > 1)
break;
netif_receive_skb is the function that processes the frame; it is described in the next
section. It is used by all poll virtual functions, both NAPI and non-NAPI.
The device’s quota is updated based on the number of buffers successfully dequeued.
As explained earlier, the input parameter budget is also updated because it is needed
by net_rx_action to keep track of how much work it can continue to do:
backlog_dev->quota -= work;
*budget -= work;
return -1;
The main loop shown earlier jumps to the label job_done if the input queue is emptied.
If the function reaches this point, the throttle state can be cleared (if it was set)
and the device can be removed from poll_list. The _ _LINK_STATE_RX_SCHED flag is
also cleared since the device does not have anything in the input queue and therefore
it does not need to be scheduled for backlog processing.
job_done:
backlog_dev->quota -= work;
*budget -= work;
list_del(&backlog_dev->poll_list);
smp_mb_ _before_clear_bit( );
netif_poll_enable(backlog_dev);
if (queue->throttle)
queue->throttle = 0;
local_irq_enable( );
return 0;
}
Actually, there is another difference between process_backlog and a NAPI driver’s
poll method. Let’s return to drivers/net/tg3.c as an example:
if (done) {
spin_lock_irqsave(&tp->lock, flags);
_ _netif_rx_complete(netdev);
tg3_restart_ints(tp);
spin_unlock_irqrestore(&tp->lock, flags);
}
done here is the counterpart of job_done in process_backlog, with the same meaning
that the queue is empty. At this point, in the NAPI driver, the _ _netif_rx_complete
function (defined in the same file) removes the device from the poll_list list, a task
that process_backlog does directly. Finally, the NAPI driver re-enables interrupts for
the device. As we anticipated at the beginning of the section, process_backlog runs
with interrupts enabled.
Ingress Frame Processing
As mentioned in the previous section, netif_receive_skb is the helper function used
by the poll virtual function to process ingress frames. It is illustrated in Figure 10-7.
Multiple protocols are allowed by both L2 and L3. Each device driver is associated
with a specific hardware type (e.g., Ethernet), so it is easy for it to interpret the L2
header and extract the information that tells it which L3 protocol is being used, if
any (see Chapter 13). When net_rx_action is invoked, the L3 protocol identifier has
already been extracted from the L2 header and stored into skb->protocol by the
device driver.
The three main tasks of netif_receive_skb are:
• Passing a copy of the frame to each protocol tap, if any are running
• Passing a copy of the frame to the L3 protocol handler associated with skb->
protocol*
• Taking care of those features that need to be handled at this layer, notably bridging
(which is described in Part IV)
If no protocol handler is associated with skb->protocol and none of the features handled
in netif_receive_skb (such as bridging) consumes the frame, it is dropped
because the kernel doesn’t know how to process it.
Before delivering an input frame to these protocol handlers, netif_receive_skb must
handle a few features that can change the destiny of the frame.
Bonding allows a group of interfaces to be grouped together and be treated as a single
interface. If the interface from which the frame was received belonged to one such
group, the reference to the receiving interface in the sk_buff data structure must be
changed to the device in the group with the role of master before netif_receive_skb
delivers the packet to the L3 handler. This is the purpose of skb_bond.
skb_bond(skb);
The delivery of the frame to the sniffers and protocol handlers is covered in detail in
Chapter 13.
Once all of the protocol sniffers have received their copy of the packet, and before
the real protocol handler is given its copy, Diverter, ingress Traffic Control, and
bridging features must be handled (see the next section).
When neither the bridging code nor the ingress Traffic Control code consumes the
frame, the latter is passed to the L3 protocol handlers (usually there is only one handler
per protocol, but multiple ones can be registered). In older kernel versions, this
was the only processing needed. The more the kernel network stack was enhanced
and the more features that were added (in this layer and in others), the more complex
the path of a packet through the network stack became.
At this point, the reception part is complete and it will be up to the L3 protocol handlers
to decide what to do with the packets:
Deliver them to a recipient (application) running in the receiving workstation.
• Drop them (for instance, during a failed sanity check).
• Forward them.
The last choice is common for routers, but not for single-interface workstations.
Parts V and VI cover L3 behavior in detail.
The kernel determines from the destination L3 address whether the packet is
addressed to its local system. I will postpone a discussion of this process until Part
VII; let’s take it for granted for the moment that somehow the packet will be delivered
to the upper layers (i.e., TCP, UDP, ICMP, etc.) if it is addressed to the local
system, and to ip_forward otherwise (see Figure 9-2 in Chapter 9).
This finishes our long discussion of how frame reception works. The next chapter
describes how frames are transmitted. This second path includes both frames generated
locally and received frames that need to be forwarded.
Handling special features
netif_receive_skb checks whether any Netpoll client would like to consume the
frame.
Traffic Control has always been used to implement QoS on the egress path. However,
with recent releases of the kernel, you can configure filters and actions on
ingress traffic, too. Based on such a configuration, ing_filter may decide that the
input buffer is to be dropped or that it will be processed further somewhere else (i.e.,
the frame is consumed).
Diverter allows the kernel to change the L2 destination address of frames originally
addressed to other hosts so that the frames can be diverted to the local host. There
are many possible uses for this feature, as discussed at http://diverter.sourceforge.net.
The kernel can be configured to determine the criteria used by Diverter to decide
whether to divert a frame. Common criteria used for Diverter include:
• All IP packets (regardless of L3 protocol)
• All TCP packets
• TCP packets with specific port numbers
• All UDP packets
• UDP packets with specific port numbers
The call to handle_diverter decides whether to change the destination MAC address.
In addition to the change to the destination MAC address, skb->pkt_type must be
changed to PACKET_HOST.
Yet another L2 feature could influence the destiny of the frame: Bridging. Bridging,
the L2 counterpart of L3 routing, is addressed in Part IV. Each net_device data structure
has a pointer to a data structure of type net_bridge_port that is used to store the
extra information needed to represent a bridge port. Its value is NULL when the
interface has not enabled bridging. When a port is configured as a bridge port, the
kernel looks only at L2 headers. The only L3 information the kernel uses in this situation
is information pertaining to firewalling.
Since net_rx_action represents the boundary between device drivers and the L3 protocol
handlers, it is right in this function that the Bridging feature must be handled.
When the kernel has support for bridging, handle_bridge is initialized to a function
that checks whether the frame is to be handed to the bridging code. When the frame
is handed to the bridging code and the latter consumes it, handle_bridge returns 1. In
all other cases, handle_bridge returns 0 and netif_receive_skb will continue processing
the frame skb.
if (handle_bridge(skb, &pt_prev, &ret));
goto out;















 175
175

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









