









注意看哦,有两个版本的。
理论基础
说实话,讲理论基础实在不是我的强项,但是还是得硬着头皮来讲,希望我的讲解不至于晦涩难懂。
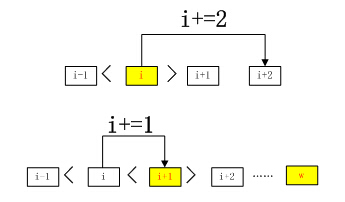
非极大值抑制,简称为NMS算法。是一种获取局部最大值的有效方法。在3领域中,假设一个行向量的长度为w,从左向右,由第一个到第w个和其3领域中的数值进行比对。
如果某个i大于i+1并且小于i-1,则其为一个绝不最大值,同时也就意味着i+1不是一个局部最大值,所以将i移动2个步长,从i+2开始继续向后进行比较判断。如果某个i不满足上述条件,则将i+1,继续对i+1进行比对。当比对到最后一个w时,直接将w设置为局部最大值。算法流程如下图所示。
应用范围
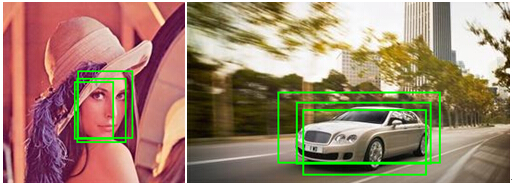
非极大值抑制NMS在目标检测,定位等领域是一种被广泛使用的方法。对于目标具体位置定位过程,不管是使用sw(sliding Window)还是ss(selective search)方法,都会产生好多的候选区域。实际看到的情形就是好多区域的交叉重叠,难以满足实际的应用。如下图所示。
针对该问题有3种传统的解决思路。
第一种,选取好多矩形框的交集,即公共区域作为最后的目标区域。
第二种,选取好多矩形框的并集,即所有矩形框的最小外截矩作为目标区域。当然这里也不是只要相交就直接取并集,需要相交的框满足交集占最小框的面积达到一定比例(也就是阈值)才合并。
第三种,也就是本文的NMS,简单的说,对于有相交的就选取其中置信度最高的一个作为最后结果,对于没相交的就直接保留下来,作为最后结果。
总体来说,3种处理思路都各有千秋,不能一概评论哪种好坏。各种顶会论文也会选择不同的处理方法。
#include <iostream>
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/opencv.hpp>
// 新版本写在下面文件中:
#include <opencv2/nonfree/features2d.hpp>
//#include "opencv2/features2d/features2d.hpp"
#include<opencv2/legacy/legacy.hpp>
using namespace std;
using namespace cv;
void nms(
const std::vector<cv::Rect>& srcRects,
std::vector<cv::Rect>& resRects,
float thresh
)
{
resRects.clear();
const size_t size = srcRects.size();
if (!size)
{
return;
}
// Sort the bounding boxes by the bottom - right y - coordinate of the bounding box
std::multimap<int, size_t> idxs;
for (size_t i = 0; i < size; ++i)
{
idxs.insert(std::pair<int, size_t>(srcRects[i].br().y, i));
}
// keep looping while some indexes still remain in the indexes list
while (idxs.size() > 0)
{
// grab the last rectangle
auto lastElem = --std::end(idxs);
const cv::Rect& rect1 = srcRects[lastElem->second];
resRects.push_back(rect1);
idxs.erase(lastElem);
for (auto pos = std::begin(idxs); pos != std::end(idxs); )
{
// grab the current rectangle
const cv::Rect& rect2 = srcRects[pos->second];
float intArea = (rect1 & rect2).area();
float unionArea = rect1.area() + rect2.area() - intArea;
float overlap = intArea / unionArea;
// if there is sufficient overlap, suppress the current bounding box
if (overlap > thresh)
{
pos = idxs.erase(pos);
}
else
{
++pos;
}
}
}
}
/**
*******************************************************************************
*
* main
*
*******************************************************************************
*/
int main(int argc, char* argv[])
{
std::vector<cv::Rect> srcRects;
/*
// Test 1
srcRects.push_back(cv::Rect(cv::Point(114, 60), cv::Point(178, 124)));
srcRects.push_back(cv::Rect(cv::Point(120, 60), cv::Point(184, 124)));
srcRects.push_back(cv::Rect(cv::Point(114, 66), cv::Point(178, 130)));*/
/*
// Test 2
srcRects.push_back(cv::Rect(cv::Point(12, 84), cv::Point(140, 212)));
srcRects.push_back(cv::Rect(cv::Point(24, 84), cv::Point(152, 212)));
srcRects.push_back(cv::Rect(cv::Point(12, 96), cv::Point(140, 224)));
srcRects.push_back(cv::Rect(cv::Point(36, 84), cv::Point(164, 212)));
srcRects.push_back(cv::Rect(cv::Point(24, 96), cv::Point(152, 224)));
srcRects.push_back(cv::Rect(cv::Point(24, 108), cv::Point(152, 236)));*/
// Test 3
srcRects.push_back(cv::Rect(cv::Point(12, 30), cv::Point(76, 94)));
srcRects.push_back(cv::Rect(cv::Point(12, 36), cv::Point(76, 100)));
srcRects.push_back(cv::Rect(cv::Point(72, 36), cv::Point(200, 164)));
srcRects.push_back(cv::Rect(cv::Point(84, 48), cv::Point(212, 176)));
cv::Size size(0, 0);
for (const auto& r : srcRects)
{
size.width = std::max(size.width, r.x + r.width);
size.height = std::max(size.height, r.y + r.height);
}
cv::Mat img = cv::Mat(2 * size.height, 2 * size.width, CV_8UC3, cv::Scalar(0, 0, 0));
cv::Mat imgCopy = img.clone();
for (auto r : srcRects)
{
cv::rectangle(img, r, cv::Scalar(0, 0, 255), 2);
}
cv::namedWindow("before", cv::WINDOW_NORMAL);
cv::imshow("before", img);
cv::waitKey(1);
std::vector<cv::Rect> resRects;
nms(srcRects, resRects, 0.3f);
for (auto r : resRects)
{
cv::rectangle(imgCopy, r, cv::Scalar(0, 255, 0), 2);
}
cv::namedWindow("after", cv::WINDOW_NORMAL);
cv::imshow("after", imgCopy);
cv::waitKey(0);
return 0;
}
实验结果:

#include <iostream>
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/opencv.hpp>
// 新版本写在下面文件中:
#include <opencv2/nonfree/features2d.hpp>
//#include "opencv2/features2d/features2d.hpp"
#include<opencv2/legacy/legacy.hpp>
using namespace std;
using namespace cv;
static void sort(int n, const vector<float> x, vector<int> indices)
{
// 排序函数,排序后进行交换的是indices中的数据
// n:排序总数// x:带排序数// indices:初始为0~n-1数目
int i, j;
for (i = 0; i < n; i++)
for (j = i + 1; j < n; j++)
{
if (x[indices[j]] > x[indices[i]])
{
//float x_tmp = x[i];
int index_tmp = indices[i];
//x[i] = x[j];
indices[i] = indices[j];
//x[j] = x_tmp;
indices[j] = index_tmp;
}
}
}
int nonMaximumSuppression(int numBoxes, const vector<CvPoint> points,const vector<CvPoint> oppositePoints,
const vector<float> score, float overlapThreshold,int& numBoxesOut, vector<CvPoint>& pointsOut,
vector<CvPoint>& oppositePointsOut, vector<float> scoreOut)
{
// 实现检测出的矩形窗口的非极大值抑制nms
// numBoxes:窗口数目// points:窗口左上角坐标点// oppositePoints:窗口右下角坐标点// score:窗口得分
// overlapThreshold:重叠阈值控制// numBoxesOut:输出窗口数目// pointsOut:输出窗口左上角坐标点
// oppositePoints:输出窗口右下角坐标点// scoreOut:输出窗口得分
int i, j, index;
vector<float> box_area(numBoxes); // 定义窗口面积变量并分配空间
vector<int> indices(numBoxes); // 定义窗口索引并分配空间
vector<int> is_suppressed(numBoxes); // 定义是否抑制表标志并分配空间
// 初始化indices、is_supperssed、box_area信息
for (i = 0; i < numBoxes; i++)
{
indices[i] = i;
is_suppressed[i] = 0;
box_area[i] = (float)( (oppositePoints[i].x - points[i].x + 1) *(oppositePoints[i].y - points[i].y + 1));
}
// 对输入窗口按照分数比值进行排序,排序后的编号放在indices中
sort(numBoxes, score, indices);
for (i = 0; i < numBoxes; i++) // 循环所有窗口
{
if (!is_suppressed[indices[i]]) // 判断窗口是否被抑制
{
for (j = i + 1; j < numBoxes; j++) // 循环当前窗口之后的窗口
{
if (!is_suppressed[indices[j]]) // 判断窗口是否被抑制
{
int x1max = max(points[indices[i]].x, points[indices[j]].x); // 求两个窗口左上角x坐标最大值
int x2min = min(oppositePoints[indices[i]].x, oppositePoints[indices[j]].x); // 求两个窗口右下角x坐标最小值
int y1max = max(points[indices[i]].y, points[indices[j]].y); // 求两个窗口左上角y坐标最大值
int y2min = min(oppositePoints[indices[i]].y, oppositePoints[indices[j]].y); // 求两个窗口右下角y坐标最小值
int overlapWidth = x2min - x1max + 1; // 计算两矩形重叠的宽度
int overlapHeight = y2min - y1max + 1; // 计算两矩形重叠的高度
if (overlapWidth > 0 && overlapHeight > 0)
{
float overlapPart = (overlapWidth * overlapHeight) / box_area[indices[j]]; // 计算重叠的比率
if (overlapPart > overlapThreshold) // 判断重叠比率是否超过重叠阈值
{
is_suppressed[indices[j]] = 1; // 将窗口j标记为抑制
}
}
}
}
}
}
numBoxesOut = 0; // 初始化输出窗口数目0
for (i = 0; i < numBoxes; i++)
{
if (!is_suppressed[i]) numBoxesOut++; // 统计输出窗口数目
}
index = 0;
for (i = 0; i < numBoxes; i++) // 遍历所有输入窗口
{
if (!is_suppressed[indices[i]]) // 将未发生抑制的窗口信息保存到输出信息中
{
pointsOut.push_back(Point(points[indices[i]].x,points[indices[i]].y));
oppositePointsOut.push_back(Point(oppositePoints[indices[i]].x,oppositePoints[indices[i]].y));
scoreOut.push_back(score[indices[i]]);
index++;
}
}
return true;
}
int main()
{
Mat image=Mat::zeros(600,600,CV_8UC3);
int numBoxes=4;
vector<CvPoint> points(numBoxes);
vector<CvPoint> oppositePoints(numBoxes);
vector<float> score(numBoxes);
points[0]=Point(200,200);oppositePoints[0]=Point(400,400);score[0]=0.99;
points[1]=Point(220,220);oppositePoints[1]=Point(420,420);score[1]=0.9;
points[2]=Point(100,100);oppositePoints[2]=Point(150,150);score[2]=0.82;
points[3]=Point(200,240);oppositePoints[3]=Point(400,440);score[3]=0.5;
float overlapThreshold=0.8;
int numBoxesOut;
vector<CvPoint> pointsOut;
vector<CvPoint> oppositePointsOut;
vector<float> scoreOut;
nonMaximumSuppression( numBoxes,points,oppositePoints,score,overlapThreshold,numBoxesOut,pointsOut,oppositePointsOut,scoreOut);
for (int i=0;i<numBoxes;i++)
{
rectangle(image,points[i],oppositePoints[i],Scalar(0,255,255),6);
char text[20];
sprintf(text,"%f",score[i]);
putText(image,text,points[i],CV_FONT_HERSHEY_COMPLEX, 1,Scalar(0,255,255));
}
for (int i=0;i<numBoxesOut;i++)
{
rectangle(image,pointsOut[i],oppositePointsOut[i],Scalar(0,0,255),2);
}
imshow("result",image);
waitKey();
return 0;
}

如果帮到你了,请赞赏支持:

















 288
288











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











