






1. 旋转矩阵
1.1 点、向量和坐标系
点:点是空间中的基本元素,没有长度,没有体积;
向量:把两个点连接起来,就构成了向量,向量可以看成从某点指向另一点的一个箭头;只有当我们指定这个三维空间中的某个坐标系时,才可以谈论该向量在此坐标系下的坐标;默认向量就是列向量;
坐标系:三根不共面的轴,坐标系的三根坐标轴的方向向量就是基,坐标系能用它的基来表示;
标准正交基:两两正交、单位长度(基就是张成这个空间的一组线性无关的向量。
任意向量在基下的坐标(坐标 + 坐标系可以表示向量)。
机器人中有各种各样的坐标系
- 世界系 World、机体系 Body、传感器参考系 Sensor
向量点乘和叉乘
点乘(内积):结果是一个数
叉乘(外积):结果是一个向量,方向垂直于这两个向量,大小为 |a||b|sin<a,b>
通过上述等式,我们引入符号^,把 写成矩阵,
实际上是一个反对称矩阵,可以把
写成矩阵与向量的乘法
,变成线性运 算。此符号是一个一一映射,意味着任意向量都对应着唯一的一个反对称矩阵,反之亦然:
2. 坐标系间的欧式变换
2.1 欧式变换之旋转
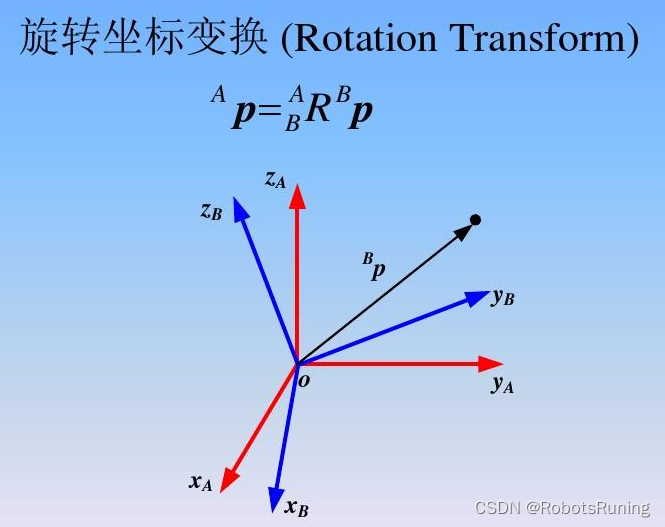
我们假设某个单位正交基 经过一次旋转变成了
,这时,对于同一个向量
它在两个基坐标系下的坐标分别为
和
。因为向量本身并没有发生变化,所以下列等式成立:
为了让两个坐标之间的关系看起来更清晰,我们将上述等式两侧同时左乘此时左侧第一项将变为单位矩阵:
矩阵描述了不同坐标系下同一向量的坐标变换关系。可以说,矩阵
描述了旋转本身。所以矩阵
称为旋转矩阵( Rotation Matrix)。显 然,我们定义的矩阵
是由两组基之间的内积组成,实际上是各基向量夹角的余弦值,所以我们也可以称矩阵
为方向余弦矩阵 (Direction Cosine Matrix)。
同时,我们可以看出,矩阵 为正交矩阵,根据正交矩阵的性质,我们可以得到下面的关系:
很明显, 刻画了一个相反的旋转。
除些之外,旋转矩阵也有一些特别的性质,我们通过矩阵 的行列式可以看出,它是一个行列式为 1 的正交矩阵。反过来说,行列式为 1 的 正交矩阵也是一个旋转矩阵。
根据这些性质,我们可以推广到 维旋转矩阵,可以将
维旋转矩阵的集合定义如下:
在这里,表示的是特殊正交群(Special 0rthogonal Group)的意思,通过上式我们可以看出,这个集合由维空间的旋转拒阵组成,所以我们可以用
表示二维空间的旋转。我们之后可以通过旋转短阵直接谈论两个坐标系之间的旋转变换,而不再通讨基表述。
2.2 两个坐标系间的欧式变换
我们经常在实际场景中定义各种各样的坐标系,如果考虑运动的机器人(即相机),那么常见的做法是设定一个惯性坐标系(或者叫世界坐标系),可以认为它是固定不动的。
刚体运动: 两个坐标系之间的运动变换由一个旋转加上一个平移组成,这种运动就是刚体运动。相机运动就是一个刚体运动。刚体运动过程中,同一个向量在各个坐标系下的长度和夹角都不会发生变化。此时,我们说手机坐标系和世界坐标系之间,相差了一个欧氏变换(Euclidean Transform)。
旋转矩阵也有一些特别的性质,我们通过矩阵R的行列式可以看出,它是一个行列式为1的正交矩阵。反过来说,行列式为1的正交矩阵也是一个旋转矩阵
视觉SLAM十四讲 3-三维空间刚体运动_三维空间中的刚体有哪几个运动维度组成_Nismilesucc的博客-CSDN博客
视觉SLAM十四讲笔记-第三讲 刚体运动_独自悠哉独自在的博客-CSDN博客

















 254
254











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









