







 本文探讨了在使用qmc5883P磁力计时遇到的坐标方向不清晰的问题。通过实验发现,该芯片的X、Y、Z轴方向与datasheet示例不完全一致,X轴始终与丝印字体水平,Y轴始终垂直,而Z轴垂直于丝印字体平面。同时,详细介绍了0x29寄存器的8种方向设置模式,并指出其对轴正负方向的影响。此外,还提到了芯片在正常模式和连续模式下的不同数据输出频率及对应的功耗情况。
本文探讨了在使用qmc5883P磁力计时遇到的坐标方向不清晰的问题。通过实验发现,该芯片的X、Y、Z轴方向与datasheet示例不完全一致,X轴始终与丝印字体水平,Y轴始终垂直,而Z轴垂直于丝印字体平面。同时,详细介绍了0x29寄存器的8种方向设置模式,并指出其对轴正负方向的影响。此外,还提到了芯片在正常模式和连续模式下的不同数据输出频率及对应的功耗情况。
问题
最近一个项目用到qmc5883p, 然而确定磁力计方向的时候发现datasheet上写的不是很清楚, 并且example中还有一个设置方向的一步, 于是测试了芯片坐标方向并记录了下来; 该芯片和qmc5883L方向并不一致;
结果
qmc5883P的datasheet给出来如下说明, Y为笔者添加的;
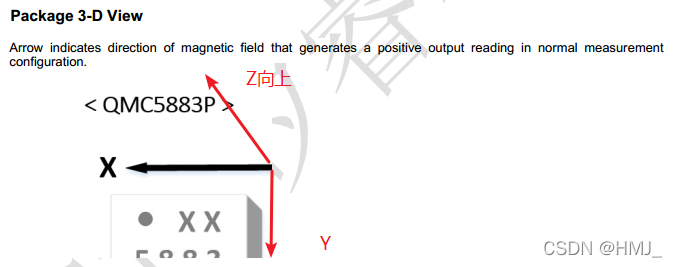
但是这个方向是按照datasheet的example设置的结果:
//Define the sign for X Y and Z axis
qmc5883p_write_reg(0x29, 0x06);
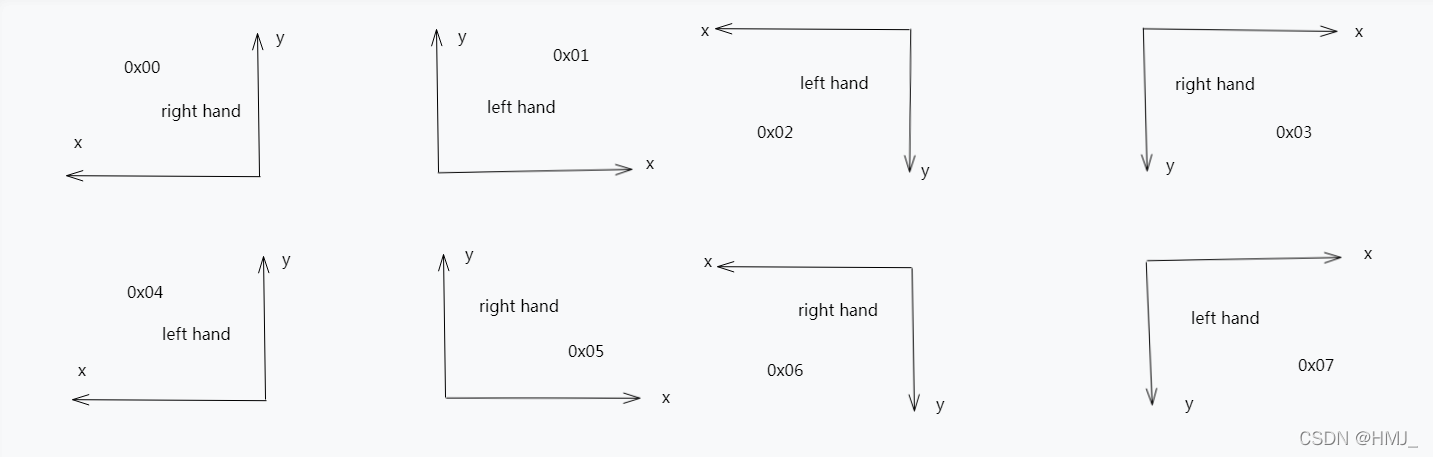
芯片寄存器0x29datasheet中并未介绍, 但是经过测试存在 0x00-0x07八种方向设置, 但是x方向总是和丝印字体方向水平, y方向总是和丝印字体方向垂直, z方向总是垂直于丝印字体平面, 改变的只是x,y,z轴的正负方向;
另外该芯片normal mode下支持4中数据输出频率, 10Hz, 50Hz, 100Hz, 200Hz, continuous mode下, 最大支持1500Hz的数据输出频率; 正常模式下输出频率越高功耗越高, 连续模式下功耗最大;

















 1460
1460

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









