For our Article "Geographical Information Enhanced Cooperative Localization in Vehicular Ad-Hoc Networks", we did a simplified experiment to verify the effectiveness of the proposed GIE-CL system.The experiment were implemented in the campus of Beijing University of Posts and Telecommunications. The experimental data can be download here.
Firstly, we choose a area with a number of buildings, which ensure NLOS measurements exit. Secondly, 20 points are selected to be the vehicle locations. The experiment area and points selection are showed in Figure 1.
Figure 1:
Thirdly, the GNSS position of each ”vehicle” was obtained by the vehicle GPS tracker (as showed in Figure 2 (a)).
Figure 2:
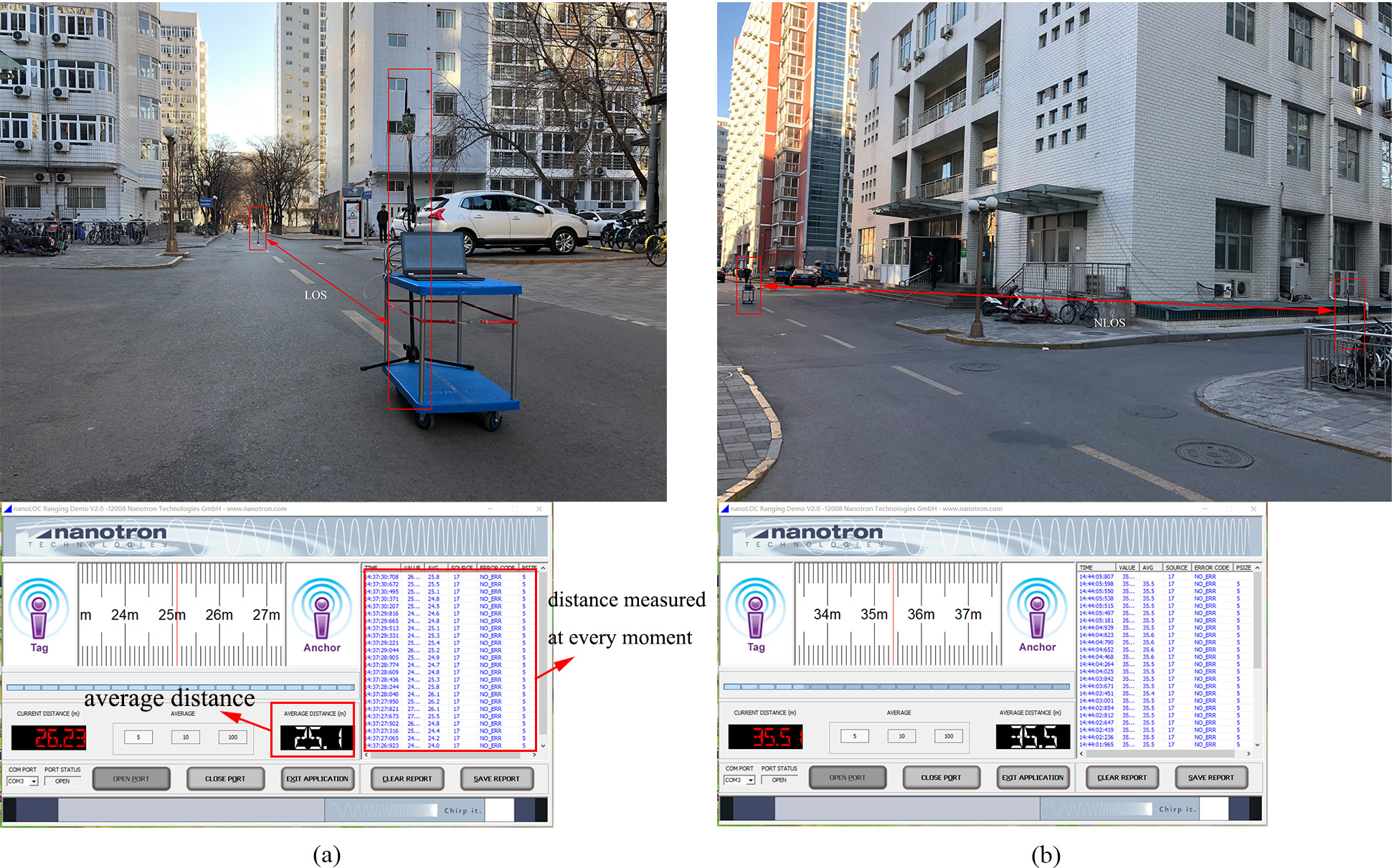
Then , TOA are measured among these 20 ”vehicles”. The devices we used are two single chips (as showed in Figure 2 (b)), the nanoLOC TRX Transceivers, which are produced by Nanotron Technologies. The transceivers operate in the ISM band of 2.4GHz, communicate based on the wireless standard IEEE 802.15.4a. The TOA between two transceivers is determined by Symmetrical Double-Sided Two Way Ranging (SDS-TWR), and then is converted to distance. Between each communication pair, the measurement lasted one minute and the average value was taken as the measurement value. During our measurement, we found that if the link between two ”vehicles” was LOS, the distance measured was accurate, but if it was NLOS, the distance measured is very inaccurate, sometimes even up to twice the real distance. As showed in Figure 3, the distances between the two points in Figure 3 (a) and (b) are about 25m , and the distance measured in (a) was 25.1m because the link was LOS, while the distance measured in (b) was 35.5m because the link was NLOS.
Figure 3:
We implemented our GIE-CL on these real experiment data, it verified the effectiveness of the proposed GIE-CL. Figure 4 shows the GNSS positions and GIE-CL result positions on map, we can see the GIE-CL enhanced the position accuracy.

























 36
36

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









