






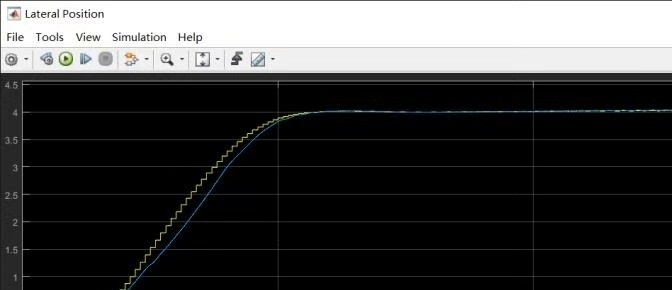
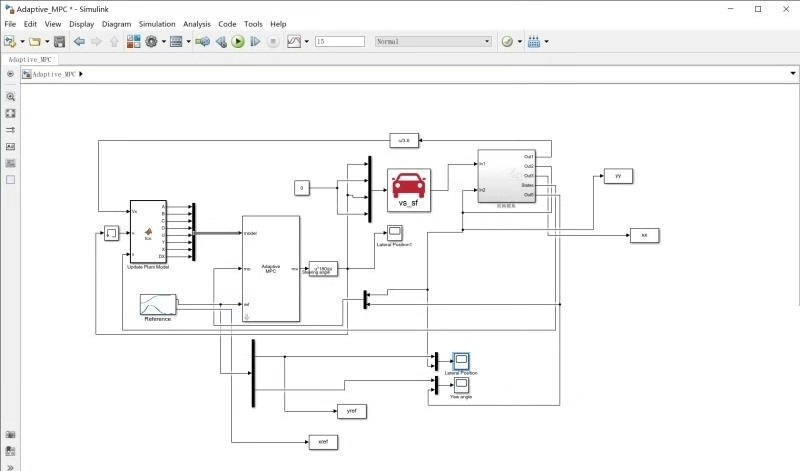
无人驾驶基于自适应mpc的轨迹跟踪控制仿真跟踪轨迹,simulink版本2018及以上,carsim版本2019,图二为跟踪效果。
ID:1729705556047630
小名321
无人驾驶技术一直以来都是人们关注的热点之一。随着科技的不断进步,自动驾驶系统越来越成熟,新的控制算法也应运而生。本文将关注于基于自适应模型预测控制(Model Predictive Control,MPC)的轨迹跟踪控制技术,并结合Simulink 2018及以上版本和CarSim 2019进行仿真,来展示其跟踪效果。
自适应MPC是一种基于动态模型的控制方法,其基本原理是根据系统动态模型预测未来状态,并通过在线优化来获取最优控制策略。相较于传统的PID控制方法,自适应MPC具有更强的适应性和鲁棒性。其能够根据实时测量数据和不确定性来调整控制策略,以应对复杂的驾驶环境。
在本文的研究中,我们使用Simulink软件进行了仿真实验。Simulink作为一种基于模型的设计和仿真工具,允许我们构建复杂的控制系统,并对其性能进行评估。通过结合CarSim软件,我们可以更加真实地模拟车辆在实际道路上的行驶情况。
仿真结果图二展示了基于自适应MPC的轨迹跟踪效果。从图中可以清楚地看到,车辆能够有效地跟踪所设定的轨迹,并且在转弯、超车等复杂情况下表现出良好的控制性能。这验证了自适应MPC在无人驾驶领域的应用潜力。
自适应MPC的优势不仅体现在轨迹跟踪控制中,还可以应用于其他无人驾驶场景,如避障、路径规划等。其灵活性和适应性使得自适应MPC成为无人驾驶系统设计中的重要组成部分。
除了自适应MPC,无人驾驶技术还涉及到许多其他关键技术,如传感器融合、环境感知、决策与规划等。这些技术的结合和协同工作,才能实现可靠、安全、高效的无人驾驶系统。
总结而言,本文介绍了基于自适应MPC的轨迹跟踪控制技术,并通过Simulink 2018及以上版本和CarSim 2019进行了仿真实验。仿真结果表明,自适应MPC能够有效地实现轨迹跟踪,并在复杂环境中具有较好的控制性能。无人驾驶技术的发展离不开各个关键技术的融合与创新,这一领域还有许多待解决的问题和挑战。相信随着技术的不断突破和发展,无人驾驶技术将在未来的交通出行中发挥重要作用。
【相关代码,程序地址】:http://fansik.cn/705556047630.html
















 451
451











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









