






1、机器和机构的组成及两者的区别。
机构:由若干个具有确定相对运动的构件组合体;
机器: 由若干个具有相对运动的零件的组合体。
作用: 机构的作用:传递力和转动,实现运动形式或速度的变化;
机器的作用:实现能量转换或完成有用的机械功,用于减轻或代替
人的劳动。
2、复合较链、局部自由度、虚约束的概念。
(1)两个以上的构件在同一处以转动副相连接,所构成的运动副是复合较
链;
(2)不影响其他构件的运动,且构件具有的自由度仅与本身的局部运动相
关,就是局部自由度;
(3)虚约束;不起独立限制作用的约束(对机构起到重复的约束作用 )。
3、较链四杆机构的基本形式、演化和应用。
(1)较链四杆机构中,按照连架杆是否可以做整周转动,可以将其分为三种基本形式,即曲柄摇杆机构,双曲柄机构和双摇杆机构。
(2)应用: 在曲柄摇杆机构中,当曲柄为主动件时,可将曲柄的连续回转运动转换成摇杆的往复摆动。如雷达天线俯仰角调整机构。
(3)当摇杆为主动件时,可将摇杆的往复摆动转换成曲柄的连续回转运动
如缝纫机踏板机构。
- 较链四杆机构可以通过以下方法演化成衍生平面四杆机构。
a.转动副演化成移动副。如引进滑块等构件。以这种方式构成的平面四杆机构有曲柄滑块机构、正弦机构等。
b.选取不同构件作为机架。以这种方式构成的平面四杆机构有转动导杆机构、摆动导杆机构、移动导杆机构、曲柄摇块机构、正切机构等。
c.变换构件的形态。
d. 扩大转动副的尺寸,演化成偏心轮机构。
4、曲柄存在条件、传动角、死点和极位夹角、行程速比系数等概念。
(1)曲柄存在的条件:
a.最长杆与最短杆的长度之和应其他两杆长度之和,称为杆长条件。
b.连架杆或机架之一为最短杆。当满足杆长条件时,其最短杆参与构成的转动副都是整转副。
(2)死点; 对从动件的作用力或力矩为零,此时连杆不能驱动从动件工作。机构处在这种位置成为死点。
(3)传动角:与压力角互余的角(锐角) Y
(4)极位夹角: 在急回运动机构中,输出构件处于两极限位置时,对应的输入曲柄两位置之间的夹角。
(5)行程速比系数: 用从动件空回行程的平均速度 V2 与工作行程的平均速度 V1 的比值 K=V2/V1= (180°+θ) /(180°-θ)。
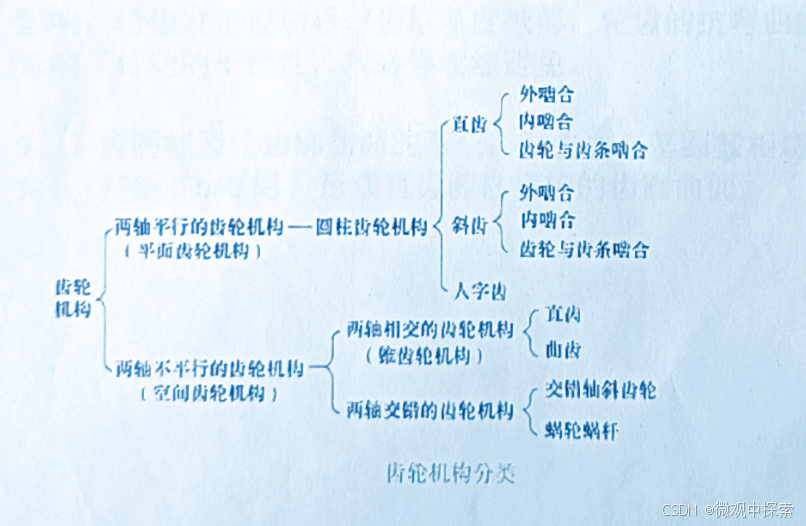
4、齿轮机构的类型和应用。
- 齿廓啮合基本定律;相互啮合的一对齿轮,在任意位置时的传动比,都与其连心线被其啮合齿廓在接触点处的公法线所分成的两线段长成反比。
6、渐开线直齿圆柱齿轮的啮合特性。(定传动比、可分性、连续啮合传动条件等)
(1)满足齿廓啮合基本定律,能实现定比传动;
(2)中心距变化不影响传动比,即渐开线齿廓啮合具有可分性:
(3)轮齿的传力方向不变:
(4)啮合角的大小恒等于节圆压力角:
(5)两齿廓啮合点为共钜点;
(6)啮合线为一条定直线;
(7)渐开线齿廓之间的正压力方向不变。

















 2922
2922

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









