






FANUC1060-4A-刀尖跟随 ,宏程序实现四轴坐标跟随
,适用于fanuc系统四轴
选置VT机床FANUC1060-4A
自动跟随功能,用后处理和宏程式实现
ID:44150679482505746
快乐就好



FANUC1060-4A-刀尖跟随 ,宏程序实现四轴坐标跟随,适用于fanuc系统四轴选置VT机床FANUC1060-4A自动跟随功能,用后处理和宏程式实现
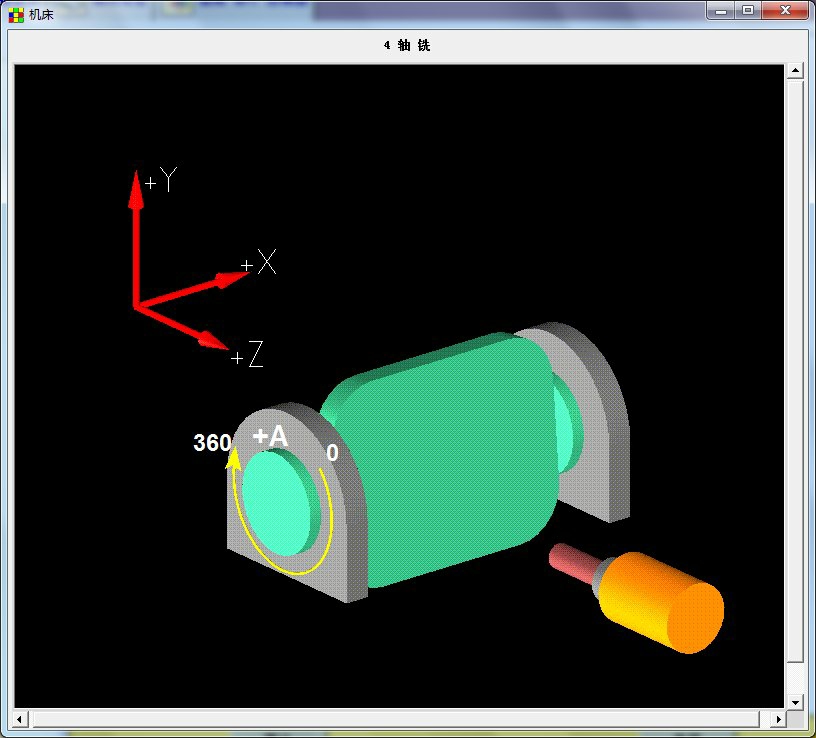
在现代制造业中,自动化生产已成为趋势,机床上的自动化功能也越来越受到关注。FANUC1060-4A是一种广泛使用的机床系统,其具有刀尖跟随的功能,可通过宏程序实现四轴坐标跟随。本文将讨论如何在FANUC1060-4A上实现刀尖跟随功能,并介绍宏程序的使用。
首先,我们需要了解什么是刀尖跟随和四轴坐标跟随。刀尖跟随是一种机床上的自动化功能,它可以使刀具随着工件轮廓的变化而自动调整刀具的位置和姿态。四轴坐标跟随是指通过四个轴的运动控制,使刀具能够随着工件轮廓进行精确的加工。
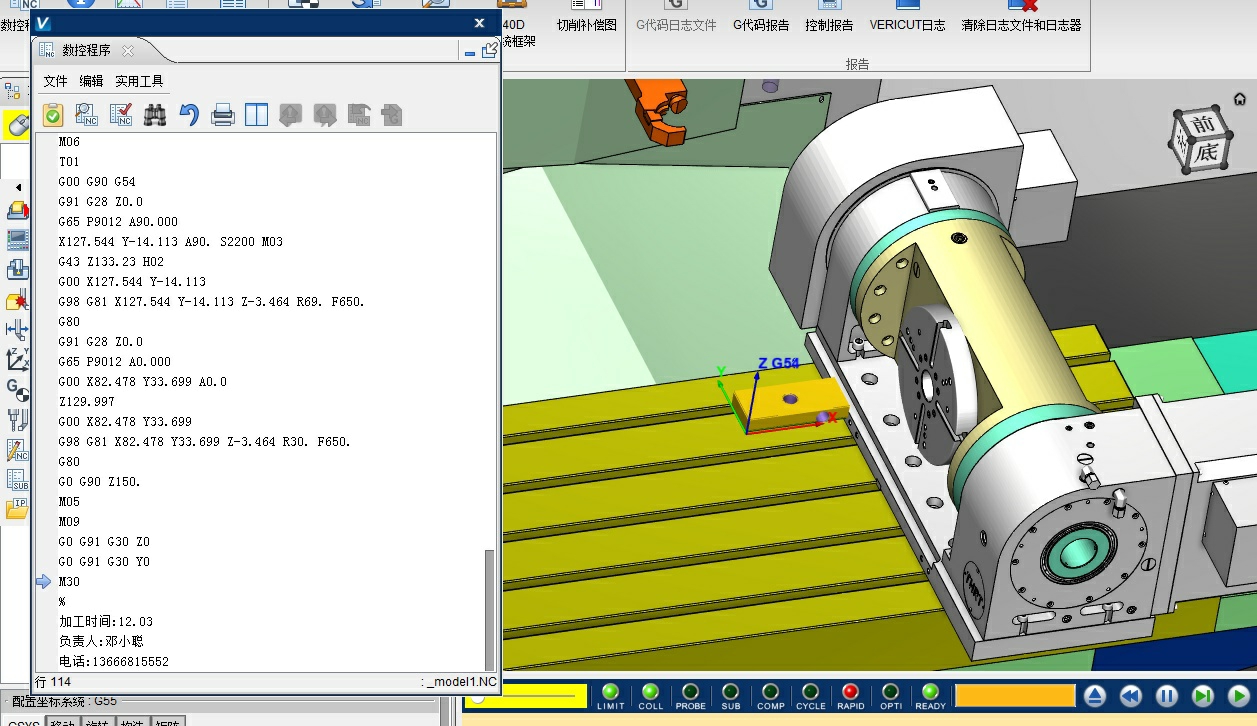
在FANUC1060-4A系统中,刀尖跟随功能可以通过宏程序来实现。宏程序是一种编程方式,通过事先编写好的程序来控制机床的运动和操作。在实现刀尖跟随功能时,我们可以使用后处理和宏程式来编写相应的程序。
实现刀尖跟随功能的第一步是对工件轮廓进行扫描和建模。通过使用传感器或其他测量设备,我们可以获取工件的精确轮廓数据,并将其转换为机床系统可以识别和处理的格式。这些数据将成为后续编写宏程序的基础。
接下来,我们需要编写宏程序来实现刀尖跟随功能。宏程序是由一系列指令组成的程序,可以在机床系统中进行执行。在编写宏程序时,我们需要考虑刀具的位置、姿态和运动路径等因素,以确保刀具能够准确地跟随工件轮廓进行加工。
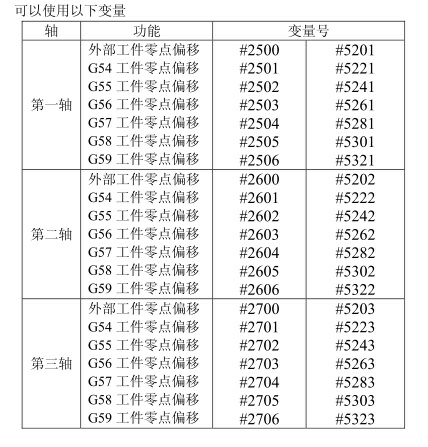
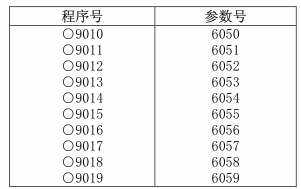
在编写宏程序时,我们可以使用FANUC1060-4A系统提供的相关指令和函数。这些指令和函数可以帮助我们实现刀尖跟随功能,包括刀具位置的计算、运动轨迹的规划以及刀具姿态的调整等。
除了编写宏程序外,我们还需要进行后处理。后处理是将编写好的宏程序转换为机床系统可以执行的代码的过程。在后处理过程中,我们需要考虑机床系统的特性和参数,并根据实际情况进行相应的调整和优化,以确保生成的代码能够正确地运行和实现刀尖跟随功能。
总结起来,FANUC1060-4A-刀尖跟随功能是一种通过宏程序实现的四轴坐标跟随功能。通过事先对工件轮廓进行扫描和建模,并编写宏程序来控制刀具的运动和姿态,我们可以实现刀具的自动调整和精确加工。在实际应用中,我们还需要进行后处理来生成可执行的代码,并根据机床系统的特性进行相应的调整和优化。这种刀尖跟随功能可以提高机床的自动化程度,减少人工操作的需求,提高加工的精度和效率。因此,它在现代制造业中具有广泛的应用前景。
【相关代码 程序地址】: http://nodep.cn/679482505746.html















 8062
8062











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









