






C#应用案例# 视觉定位应用案例 #visionPro定位应用案例
集合VP、相机拍照、光源控制、TCPIP通信、串口通信为一体的实际项目应用案例
注释清楚,代码易懂,适合新手做项目应用
ID:63199664796200972
机器视觉非标自动化定制






C#应用案例——视觉定位应用案例
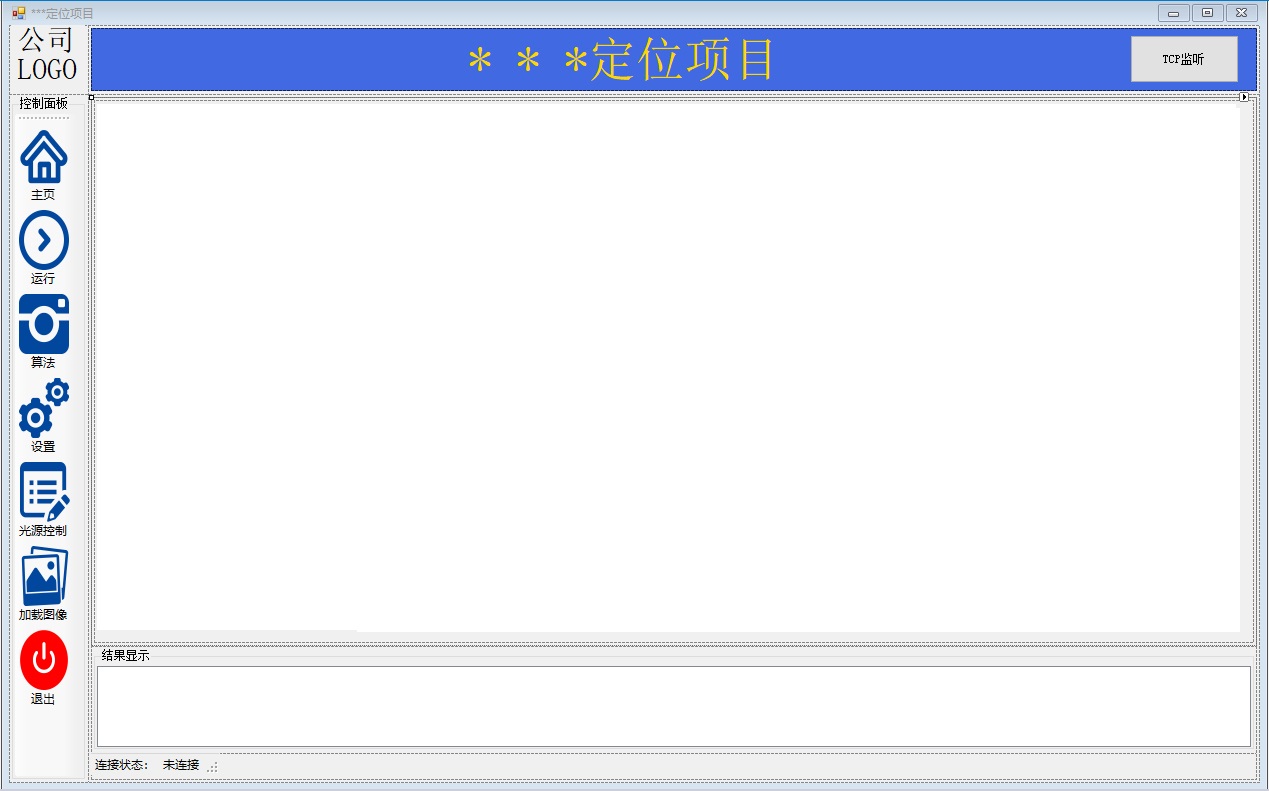
视觉定位在工业自动化领域起到了至关重要的作用。它通过图像处理技术来实现对物体的定位、识别和检测,帮助机器人、自动化设备等实现精准操作。本文将围绕视觉定位应用案例展开讨论,介绍一个集合VP(VisionPro)、相机拍照、光源控制、TCPIP通信、串口通信为一体的实际项目应用案例。这个案例注释清楚,代码易懂,适合新手进行项目应用。
在这个应用案例中,我们首先使用VisionPro软件进行图像处理。VisionPro是一款功能强大的视觉定位软件,它提供了丰富的图像处理工具和算法,可以帮助我们实现对物体的定位和识别。
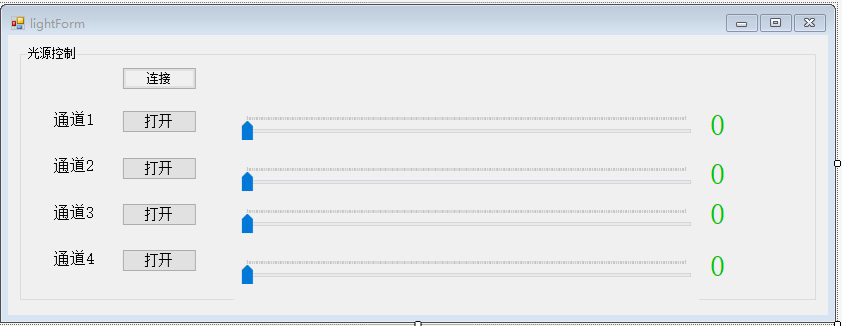
在这个案例中,我们需要使用一台相机进行拍照,然后将拍摄到的图像传输给VisionPro进行处理。为了保证图像的质量,我们需要控制光源的亮度和角度。通过控制光源的亮度和角度,我们可以调整图像的对比度,从而提高图像的质量。
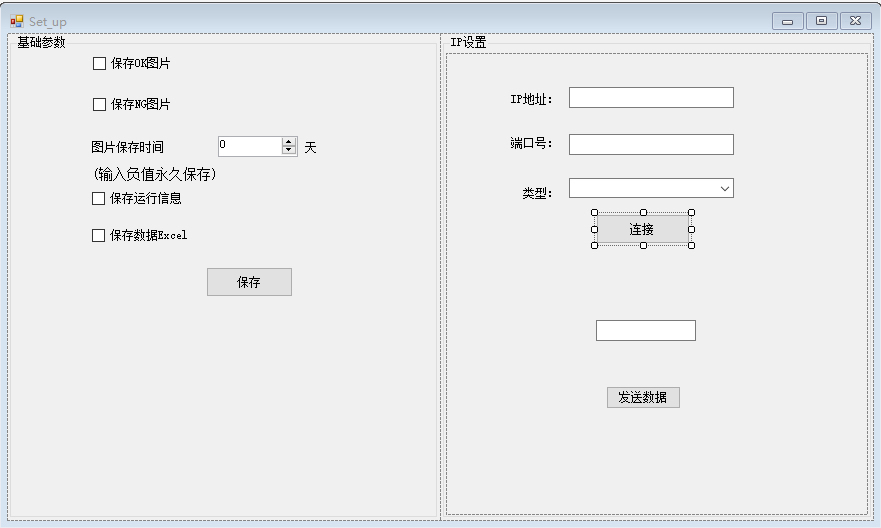
为了将图像传输给VisionPro,我们需要借助网络通信技术。我们可以通过TCPIP通信或者串口通信来实现图像的传输。TCPIP通信是一种常用的网络通信方式,它可以实现高速的数据传输,并且具有较好的稳定性和可靠性。而串口通信则是一种传统的串行通信方式,它可以实现简单的数据传输。
在这个案例中,我们需要将VisionPro处理后的数据发送给其他设备进行控制。通过TCPIP通信或者串口通信,我们可以将数据发送给其他设备,实现对设备的远程控制。
整个项目的代码注释清楚,易于理解,非常适合新手来学习和应用。新手可以根据代码中的注释,了解每一步的操作和原理,逐步掌握视觉定位的相关知识和技术。
通过这个视觉定位应用案例,我们可以学习到如何使用VisionPro进行图像处理,如何控制光源来提高图像质量,以及如何使用网络通信技术将数据传输给其他设备。这些知识和技术在工业自动化领域具有广泛的应用前景,对提高生产效率和产品质量非常重要。
综上所述,本文围绕C#视觉定位应用案例展开,介绍了一个集合VP、相机拍照、光源控制、TCPIP通信、串口通信为一体的实际项目应用案例。该案例注释清楚,代码易懂,适合新手进行项目应用。通过学习和应用这个案例,我们可以深入理解视觉定位技术,并在实际项目中应用相关知识和技术,提高工作效率和产品质量。
以上相关代码,程序地址:http://matup.cn/664796200972.html















 2846
2846











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









