









文章目录
参考文献
- 自动驾驶之轨迹规划1——算法综述
- 自动驾驶之轨迹规划2——Apollo规划与控制公开课
- 自动驾驶之轨迹规划2——高速超车场景下轨迹规划的量产方案
- 自动驾驶之轨迹规划3——Apollo ROS公开课
- 自动驾驶之轨迹规划4——Apollo规划模块算法解析_20201219直播讲解
- 自动驾驶之轨迹规划5——Apollo规划中的离散点曲线平滑数学原理
- 自动驾驶之轨迹规划6——Apollo EM Motion Planner
- 自动驾驶之轨迹规划7——A Real-Time Motion Planner with Trajectory Optimization for AutonomousVehicles文献阅读
一、目录
1 全局与局部规划
1.1 全局规划
1.2 局部规划
1.3 轨迹生成
2 机器人
3 自动驾驶
二、总结

1 全局规划算法
- 根据对环境信息的把握程度可把路径规划划分为基于先验完全信息的全局路径规划和基于传感器信息的局部路径规划。其中,从获取障碍物信息是静态或是动态的角度看,全局路径规划属于静态规划,局部路径规划属于动态规划。全局路径规划需要掌握所有的环境信息,根据环境地图的所有信息进行路径规划;局部路径规划只需要由传感器实时采集环境信息,了解环境地图信息,然后确定出所在地图的位置及其局部的障碍物分布情况,从而可以选出从当前结点到某一子目标结点的最优路径。
- 在全局路径规划算法中,大致可分为三类:传统算法(Dijkstra算法、A*算法等)、智能算法(PSO算法、遗传算法、强化学习等)、传统与智能相结合的算法。智能算法种类繁多,但传统算法更为基础,故本着由浅入深的原则,首先对传统算法展开学习。
1.1 Dijkstra算法
- 【全局规划】Dijkstra
- 广度优先搜索,能获得全局最优路径,耗时较长,遇到障碍物只能重复规划(replan)
- 贪心模式,其解决的是有向图中单个节点到另一节点的最短路径问题
- 静态规划
- 栅格地图
1.2 Floyd算法
- 广度优先搜索,能获得全局最优路径,耗时较长,遇到障碍物只能重复规划(replan)
- 静态规划
- 栅格地图
1.3 A*算法
- 【全局规划】A*
- 启发式搜索算法,以此来衡量实时搜索位置和目标位置的距离关系,使搜索方向优先朝向目标点所处位置的方向,最终达到提高搜索效率的效果。
- 融合了贪心和启发思想,能快速搜索路径,路径并非全局最优,遇到障碍物只能重复规划(replan)
- 静态规划
- 栅格地图
1.4 D*算法
特点:反向增量式搜索算法
1.反向:即算法从目标点开始向起点逐步搜索;
2.增量式搜索:即算法在搜索过程中会计算每一个节点的距离度量信息H(x),在动态环境中若出现障碍物无法继续沿预先路径搜索,算法会根据原先已经得到的每个点的距离度量信息在当前状态点进行路径再规划,无需从目标点进行重新规划。
- 利用了前一次的路径搜索信息,无需重复规划,提高了搜素效率
- 动态规划
- 栅格地图
1.5 LPA*算法
- 特点:正向增量式启发式
- Life Planning A*算法是一种基于A *算法的增量启发式搜索算法
- 搜索起始点为所设起点(正向搜索),按照Key值的大小作为搜索前进的原则,迭代到目标点为下一搜索点时完成规划;Key值中包含启发式函数h项作为启发原则来影响搜索方向;处于动态环境时,LPA*可以适应环境中障碍物的变化而无需重新计算整个环境,方法是在当前搜索期间二次利用先前搜索得到的g值,以便重新规划路径。
- 动态规划
1.6 D* lite算法
- 特点:反向增量式启发式
- 基于LPA_star 算法,D* lite与LPA*的主要区别在于搜索方向的不同,这就将Key[]定义中涉及到的目标点goal替换为起始点start的相应信息。
- D*_lite算法是先在给定的地图集中逆向搜索并找到一条最优路径。在其接近目标点的过程中,通过在局部范围的搜索去应对动态障碍点的出现。增量式算法的优势在于,各个点的路径搜索已经完成,在遇到障碍点无法继续按照原路径进行逼近时,通过增量搜索的数据再利用直接在受阻碍的当前位置重新规划出一条最优路径,然后继续前进。
- 动态规划
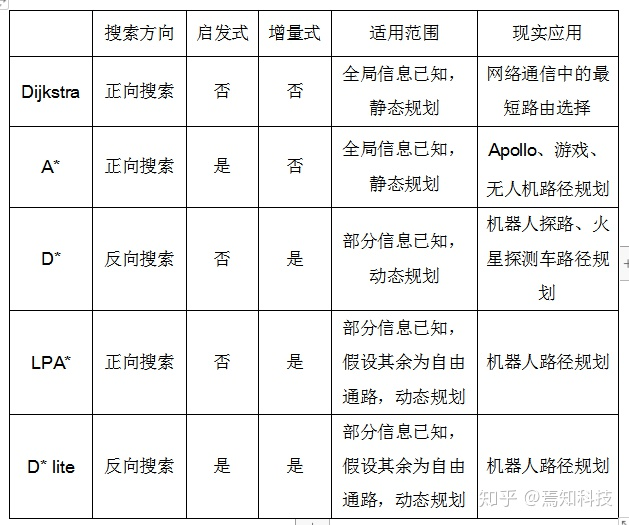
1.7 算法对比
1.7.1 搜索方向的正反
在静态环境中全局地图信息已知,则无论正向搜索还是反向搜索都可以发挥效能。但是在动态环境中,面对未知地图,要想获得最短路径则需要不断的尝试,正向搜索很容易产生与最优路径背道而驰的现象,而此时反向搜索算法能够很好的处理这种情况。反向搜索配合增量式搜索使得D* lite算法在动态障碍图中,可以利用先前迭代中产生的节点距离信息,不断更新当前点到目标点的最优路径。而在正向搜索中,增量式算法只能提供当前点到起始点的距离信息和到目标点的启发估计信息,并不能保证未搜索区域的可通行性。
1.7.2 启发式与非启发式
启发式算法能够在每次搜索时将搜索方向导向目标点,替代了非启发式算法向四周无规则遍历的局限,正常情况下能够大大提高搜索效率。但是在启发式路径受阻的情况下,搜索效果将适得其反。
1.7.3 启发式与增量式
- 启发式搜索是利用启发函数来对搜索进行指导,从而实现高效的搜索,启发式搜索是一种“智能”搜索,典型的算法例如A *算法、遗传算法等。增量搜索是对以前的搜索结果信息进行再利用来实现高效搜索,大大减少搜索范围和时间,典型的例如LPA *、D * Lite算法等。
- 搜索方向的正反多与是否能处理动态规划有关;启发式搜索带来的时效能的提高,避免全局盲目搜寻;增量式搜索则代表着迭代信息的二次利用,多用于提高算法效率。
1.8 基于采样的路径规划算法
1.8.1 RRT
- 【全局规划】快速搜索随机数(RRT)
- 是一种在完全已知的环境中通过随机采样扩展搜索的算法
- 特点:RRT算法是概率完备的,如果规划时间足够长,如果确实存在一条可行的最优路径,RRT是可以找出这条路径的。但这里存在限制条件,如果规划时间不够长,迭代次数较少,有可能无法找出实际存在的路径。
- 优点:最主要的优点就是快,因此在多自由度机器人的规划问题中发挥着较大的作用,比如机械臂的规划算法基本都是以RRT为基础的。
- 缺点:规划的路径通常不最优、路径不平滑等。
1.8.2 RRT*
1.8.3 Informed RRT*
2 局部规划算法
- 给定路径点后,以下传统局部路径规划算法可以输出控制指令,使得小车跟随这些路径点进行移动。
2.1 基于几何的算法Carrot Chasing算法
实际应用需要考虑:
- 路径点密度和间隔;
- 因为扫地机需要跟随路径的话主要是跟随直线,所以本算法主要用于直线跟踪。另外,因为是差分轮,对于大于一定角度的拐弯路径点,可以先本地旋转再行走。
- 需要实际调整参数,如虚拟点距离、角速度调整系数等。
Niu, Hanlin, et al. “Efficient path following algorithm for unmanned surface vehicle.” OCEANS 2016-Shanghai. IEEE, 2016.
2.2 DWA算法
- 【机器人规划】DWA解析
- 动态窗口法是在速度(v,w)空间中采样多组速度,并模拟机器人在这些速度下一定时间(sim_period)内的轨迹,在得到多组轨迹以后,对这些轨迹进行评价,选取最优轨迹所对应的速度来驱动机器人运行。在评价过程中,会考虑到轨迹离障碍物的距离等。因此具备动态避障能力。
- 动作采样算法
- 运动学限制:1.小车速度的最大最小值 2.电机性能影响加速度3.预留刹车距离
- 全局路径规划出一条大致的路径,然后局部路径规划会把全局路径分割成很多段,大目标分成很多小目标,然后用DWA算法依次导航到每个小目标



















 2998
2998

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











