






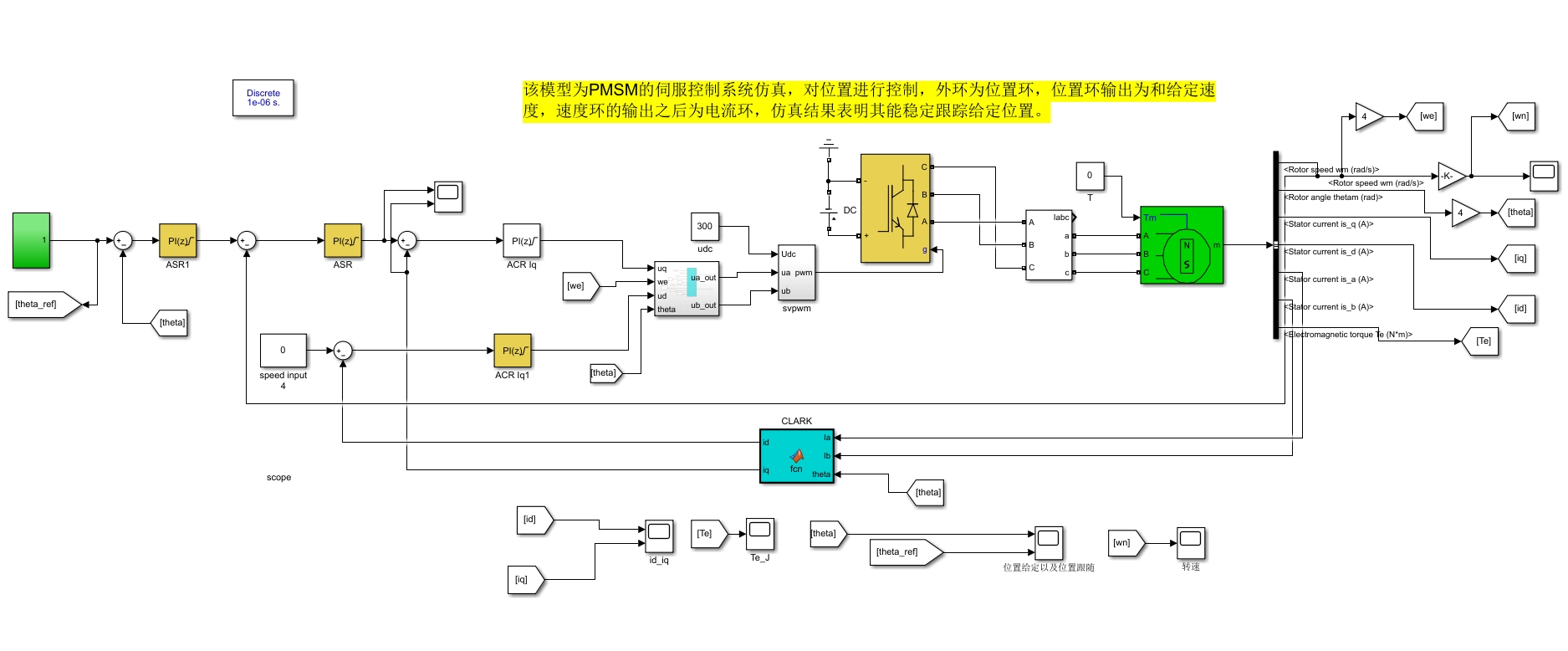
该模型为PMSM的伺服控制仿真,对位置进行控制,外环为位置环,位置环输出为和给定速度,速度环的输出之后为电流环,仿真结果表明其能稳定跟踪给定位置。
YID:85188677132331890
Keepmoving
PMSM伺服控制仿真:位置环的稳定与动态响应
在数字化与自动化的浪潮中,永磁同步电机(PMSM)以其高效、节能的特性,在工业控制领域中占据了重要地位。今天,我们将聚焦于PMSM的伺服控制仿真,特别是其位置环的控制策略。
一、模型概述
我们所仿真的模型是一个PMSM的伺服控制,其核心在于对位置的控制。整个分为外环和内环,外环为位置环,负责接收外部的位置指令并输出相应的速度给定值。内环则包括速度环和电流环,它们分别响应速度和电流的实时反馈,确保电机稳定运行。
二、位置环的控制策略
位置环作为整个的核心,其控制策略直接决定了的性能。仿真中,位置环采用比例-积分-微分(PID)控制器。通过调整PID参数,可以实现对位置的高精度控制。此外,我们采用了先进的控制算法,如模糊控制或神经网络控制,来优化PID控制器的性能,使其在动态环境下也能保持稳定的控制效果。
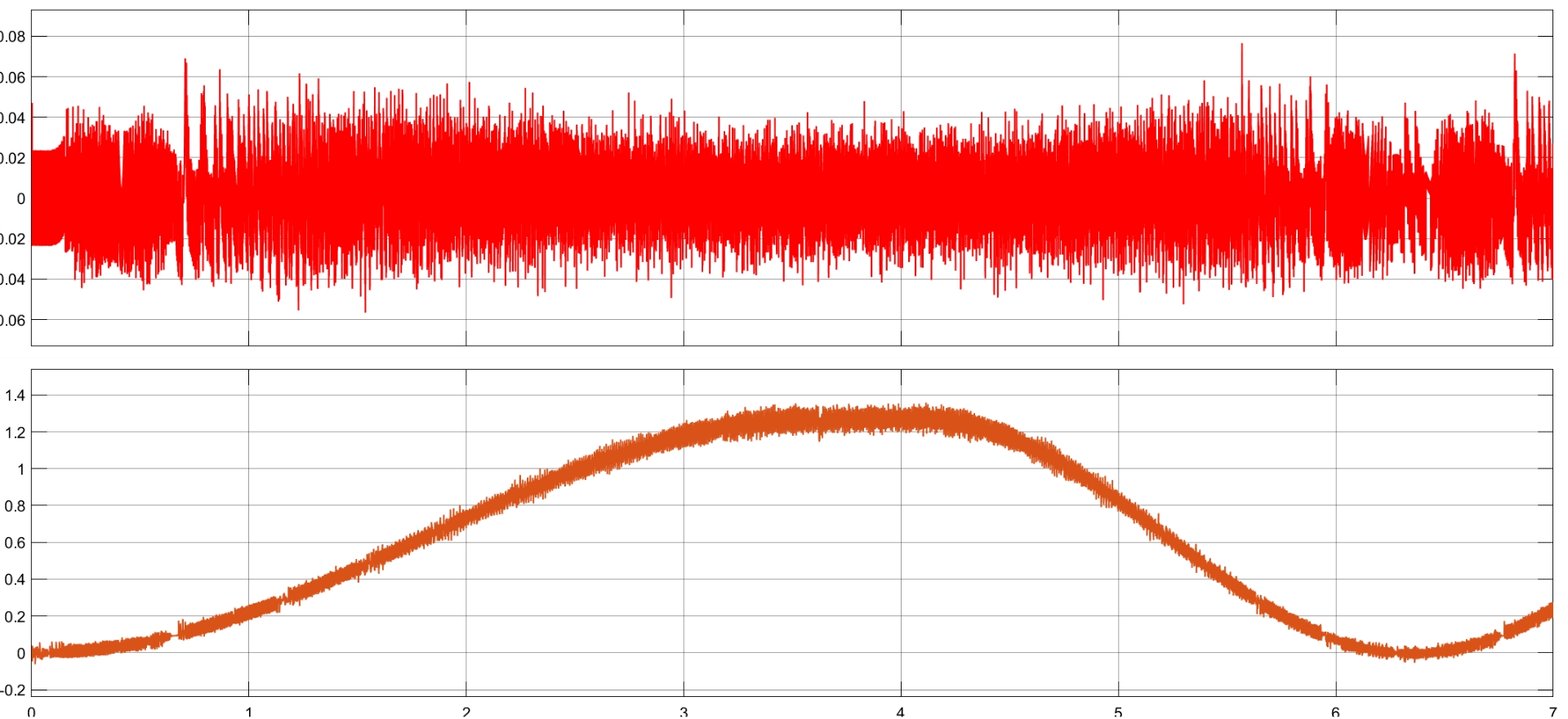
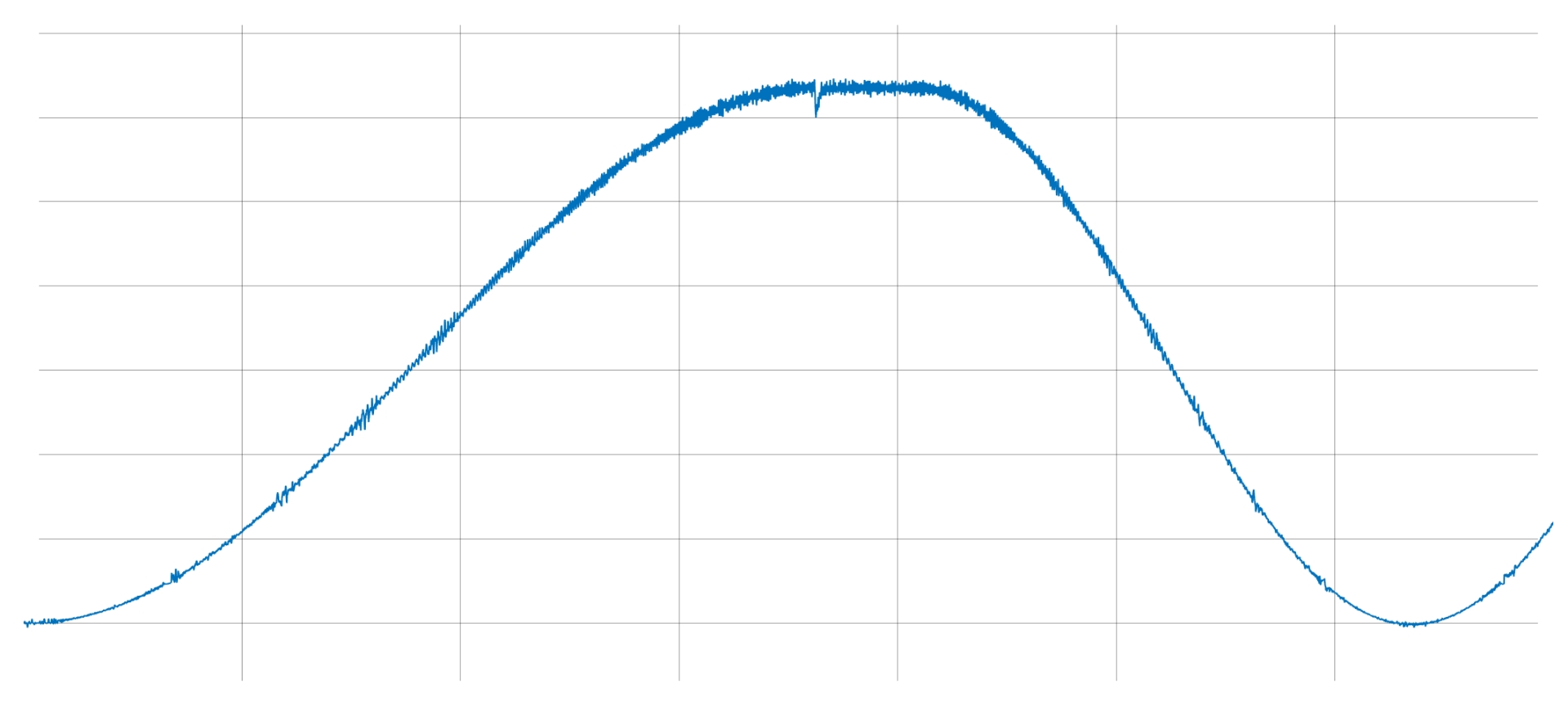
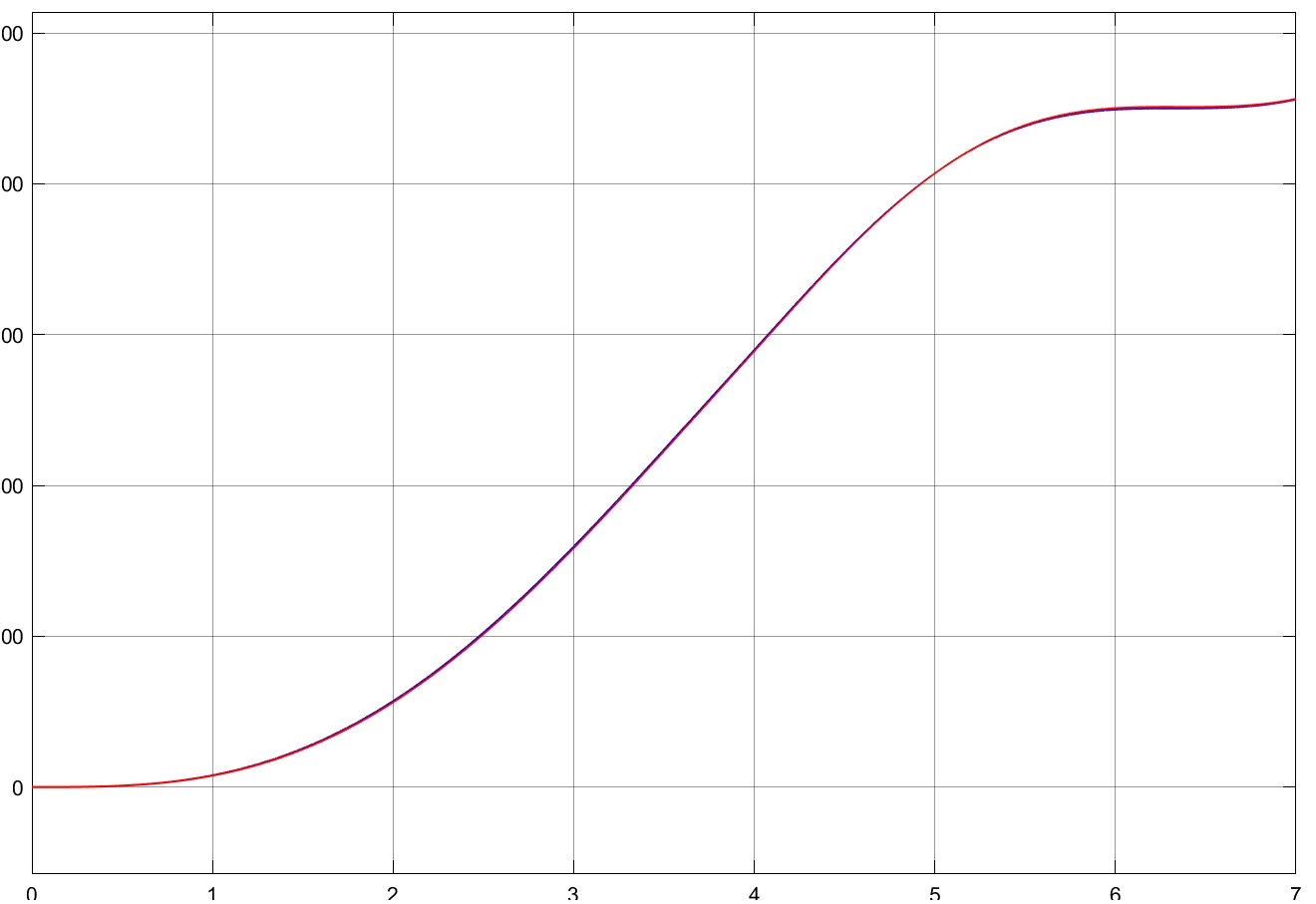
三、仿真结果分析
仿真结果表明,该模型能够稳定跟踪给定位置。在位置环的控制下,电机能够快速响应位置指令,并在短时间内达到给定位置。同时,速度环和电流环的协同工作,保证了电机在运行过程中的稳定性。此外,我们还对进行了动态测试,发现在不同负载和速度变化的情况下,都能保持良好的动态响应性能。
四、代码示例
以下是一个简单的PID控制器代码示例:
# 假设我们已经有了位置指令和电机的实时位置数据
# 初始化PID控制器参数
pid_controller = PIDController(Kp=1.0, Ki=0.1, Kd=0.01)
# 在每个控制周期中,根据实时位置和指令位置计算速度给定值
desired_speed = pid_controller.update(current_position, target_position)
# 将速度给定值传递给速度环进行控制
# ...(此处省略了速度环和电流环的控制逻辑)
五、总结与展望
通过本次仿真,我们验证了PMSM伺服控制在位置控制方面的有效性。未来,我们还将继续优化控制策略,提高的动态响应性能和稳定性。同时,我们也将探索更多先进的控制算法,如自适应控制、预测控制等,以进一步提高的性能。随着科技的不断进步,我们有理由相信,PMSM伺服控制将在更多领域得到应用,为工业自动化和智能化发展做出更大贡献。
以上就是关于PMSM伺服控制仿真的一个简要介绍和分析。通过灵活多变的写作风格和丰富的技术内容,我们希望能够让读者对这一技术有更深入的了解。同时,也期待大家在实际工作中能够灵活运用这些技术,为工业自动化和智能化发展贡献自己的力量。
后有实用信息: https://pan.baidu.com/s/1hMFzJ4saAADY9N0YsSLCaQ?pwd=nvvi

















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









