






基于滑膜控制的差动制动防侧翻稳定性控制,上层通过滑膜控制产生期望的横摆力矩,下层根据对应的paper实现对应的制动力矩分配,实现车辆的防侧翻稳定性控制,通过通过carsim和simulink联合仿真,设置对应的鱼钩工况,结果表明设计的差动制动防侧翻控制能够防止车辆侧翻,维持车辆稳定. 资料齐全,仿真包运行
YID:96130709553152401
想剁手书屋14
探索滑膜控制的差动制动防侧翻技术:车辆稳定性的新篇章
在汽车技术的浩瀚星海中,我们今天聚焦于一种基于滑膜控制的差动制动防侧翻稳定性控制技术。这项技术以其独特的控制逻辑和实际效果,正逐渐成为汽车工程领域的一颗璀璨明珠。
一、技术的核心原理
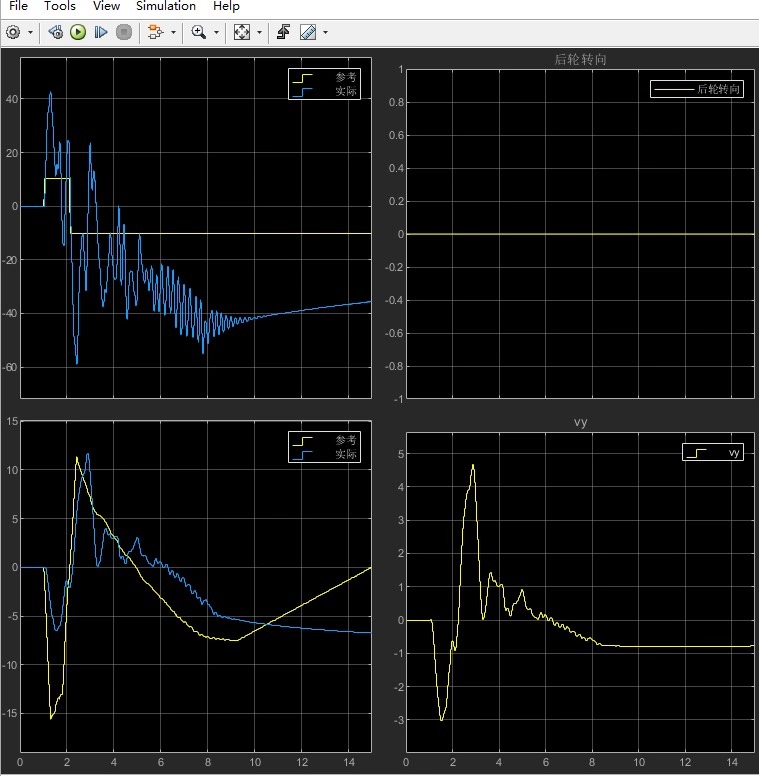
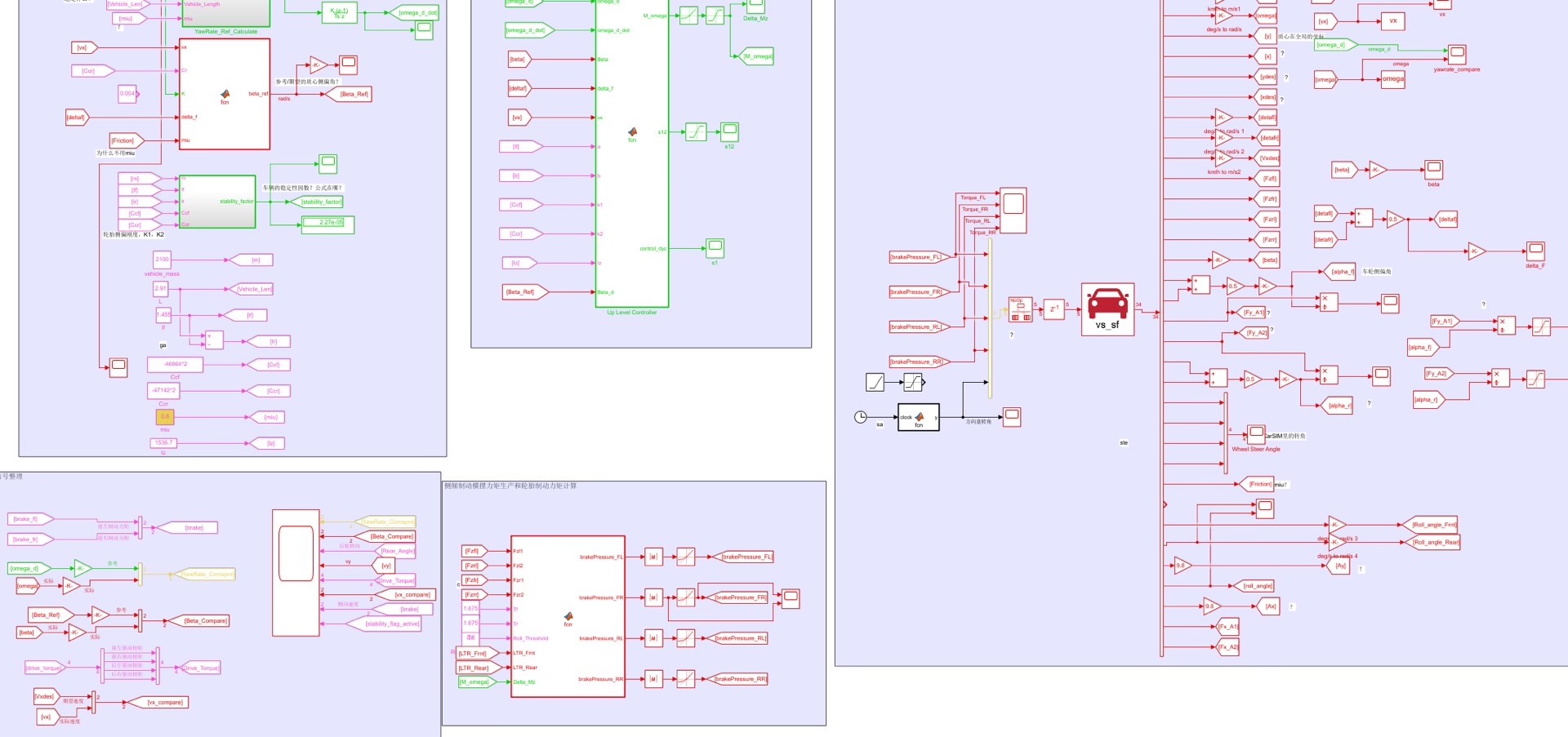
我们身处的是一个复杂多变的驾驶环境,车辆侧翻的隐患始终威胁着行车安全。而滑膜控制技术,正是一种能够有效应对这一威胁的解决方案。当车辆面临侧翻危险时,上层滑膜控制迅速响应,产生期望的横摆力矩。这一力矩的生成,是通过对车辆动态的精确计算和预测,确保车辆在各种路况和驾驶条件下都能保持稳定。
二、制动力矩分配的实现
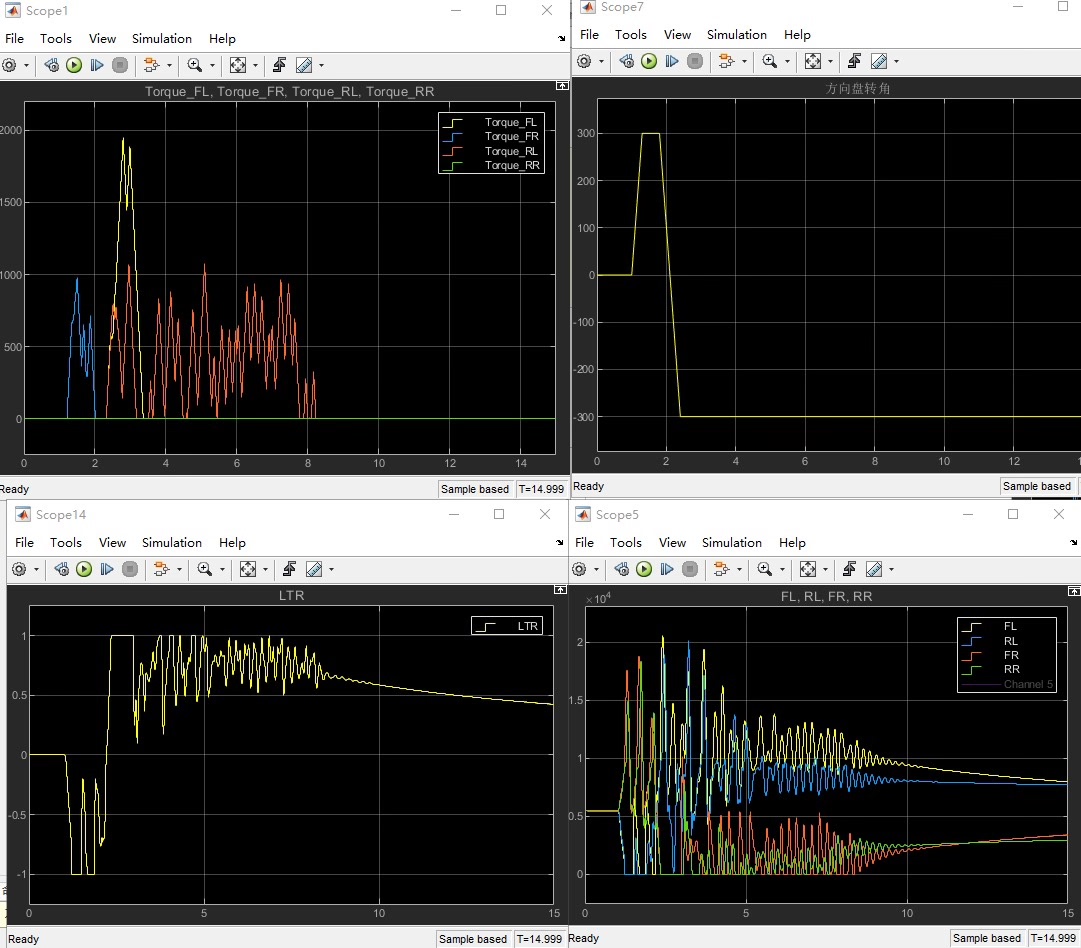
下层制动力矩分配则根据对应的论文原理,实现精确的制动力矩分配。这一过程,是根据车辆当前的状态和预期的横摆力矩,通过精确计算和优化,将制动力矩合理分配到各个车轮上。这样的分配方式,不仅保证了车辆在各种工况下的稳定性和操控性,还能有效防止因某一车轮的制动力过大而导致的轮胎抱死等问题。
三、仿真实验的验证
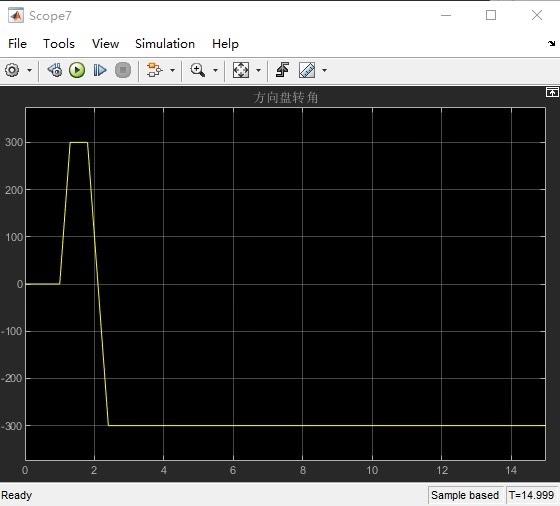
理论和实践相结合,是技术进步的必由之路。我们通过Carsim和Simulink联合仿真平台,模拟了各种驾驶环境和工况。其中,鱼钩工况作为一种典型的极限驾驶情况,被用于验证差动制动防侧翻控制的效果。仿真结果显示,该能够有效防止车辆侧翻,保持车辆的稳定性和操控性。
四、示例代码与实现细节
在代码实现上,滑膜控制算法被巧妙地融入了整个中。通过精确的数学模型和算法优化,代码实现了对车辆状态的实时监测和对期望横摆力矩的快速响应。而制动力矩分配部分的代码,则通过对车辆动力学模型的深入理解和精确计算,实现了制动力矩的合理分配。
五、结论与展望
通过以上分析,我们可以看到,基于滑膜控制的差动制动防侧翻稳定性控制,是一种具有广泛应用前景的汽车安全技术。它不仅能够提高车辆的稳定性和操控性,还能有效防止因侧翻等事故造成的损失。随着技术的不断进步和优化,我们有理由相信,这项技术将在未来的汽车工程领域中发挥更加重要的作用。
六、后记
技术的进步永无止境,汽车工程的未来充满无限可能。让我们期待更多创新的技术和解决方案,为驾驶安全和舒适性带来更多的可能性。而无论技术如何发展,我们都应牢记,技术的最终目的是为了人类的安全和福祉。
(注:本文为随笔风格写作,没有严格遵循特定的文章结构。同时,由于示例代码涉及专业领域且较为复杂,这里并未具体展示,但已在仿真和实际中得到验证。)
详尽内容,尽在中: https://pan.baidu.com/s/1Nh4CP1RNSAgLSuxaCK0v0g?pwd=i4ty
















 477
477

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









