









编者按
海洋面积占据地球总面积的大部分,而且海洋世界蕴藏着丰富的资源,围绕水下成像的相关研究和应用越来越重要。但是,收到水下光照散射、吸收以及噪声等影响,获取的水下图像普遍存在颜色偏差、清晰度差等问题。LiveVideoStackCon 2023 深圳站邀请到福州大学赵铁松老师讲解水下图像质量评价与画质增强研究案例。
文/赵铁松
整理/LiveVideoStack
大家好,我是赵铁松,今天向大家分享水下图像质量评价与画质增强研究案例。

首先介绍一下水下成像面临的问题。
现在我国国力提升要关注海洋技术,对海洋探测需要大量投入,其中需要大量的水下图像研究,特别是引进人工智能的水下图像研究。

海洋面积占据地球总面积的大部分。海洋信息获取通过声纳、换能器、水听器等设备获取,包括海洋资源、地貌、海洋搜救等关键信息。海洋信息传输通过水下无线电磁波通信、水下光纤通信以及水声通信等。
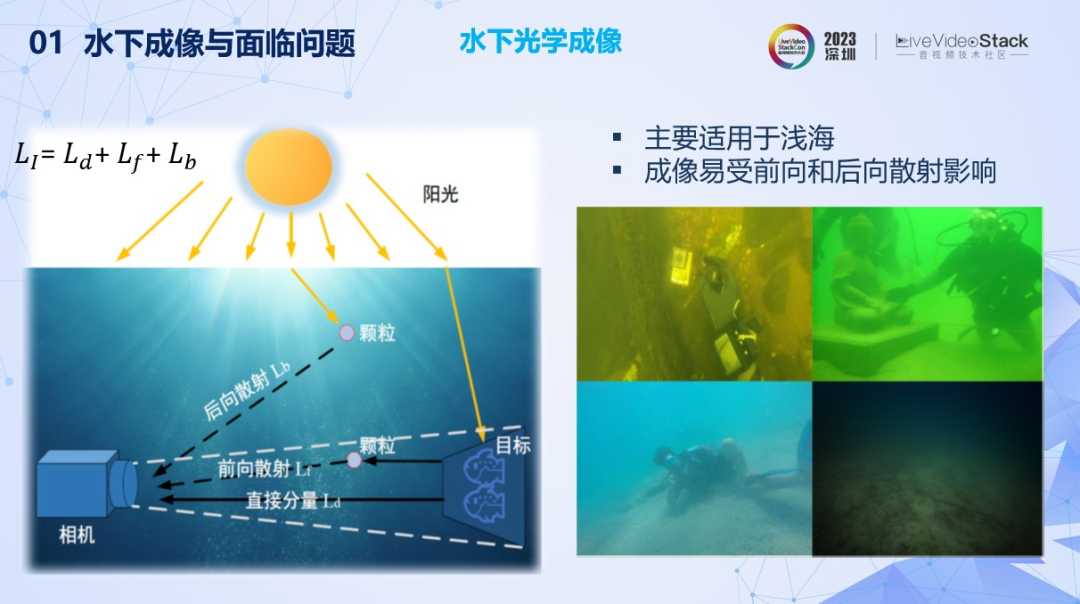
针对水下成像来说,她存在由水带来的前向散射和后向散射的问题,加上水中杂质会产生颜色奇怪的图片,如上图显示。这些问题在陆地成像并不明显,在水下特别显著,而深海光学成像更涉及低光照等问题。
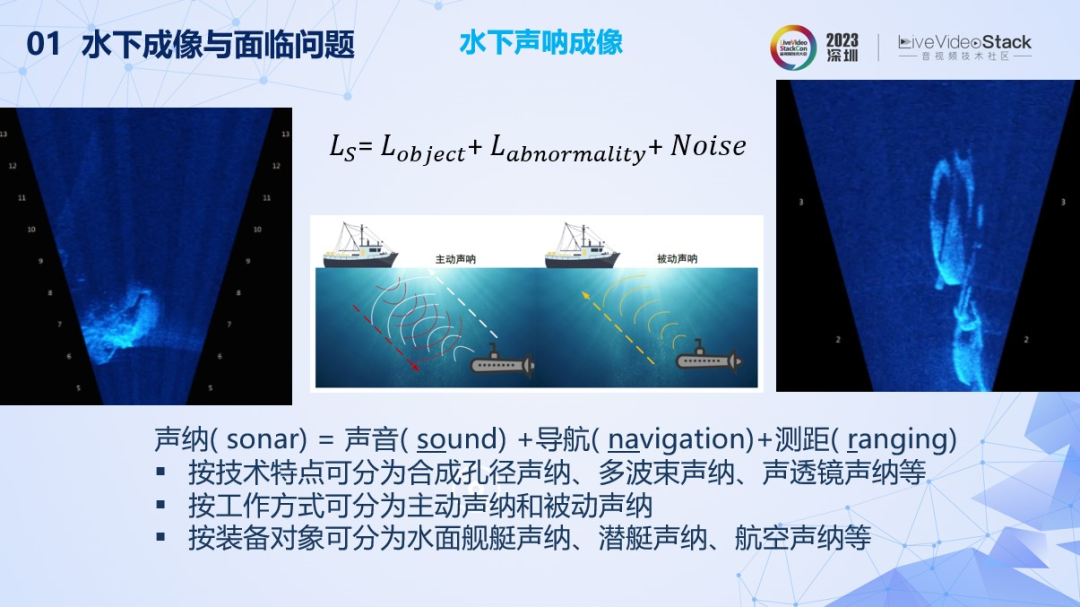
作为替代,深海成像偏向于声纳技术,按技术特点可分为合成孔径声纳、多波束声纳、声透镜声纳等。按照工作方式可分为主动声纳和被动声纳。按装备对象可分为水面舰艇声纳、潜艇声纳、航空声纳等。
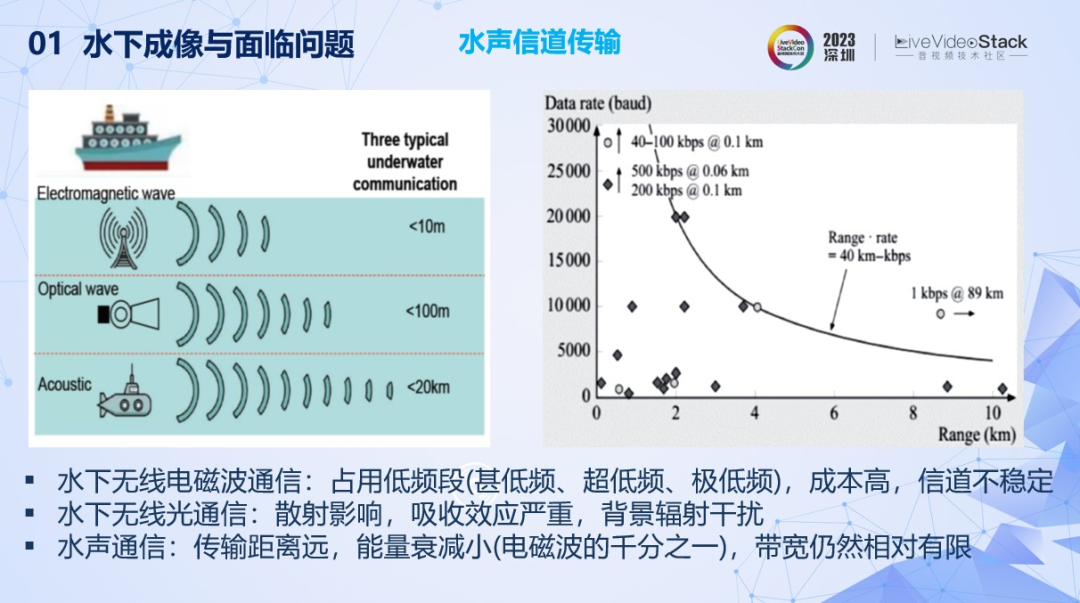
针对采集到的水下图像,进行传输则遇到更多的通信问题。水下无线电磁波传输问题是传输距离有限,成本高,信道不稳定;水下光通信同样遇到散射等问题。目前最优选择是水声通信,它同样面临信道窄、不稳定,随着传播距离衰减等问题。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 3868
3868

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









