






动态、静态障碍物局部路径规划(matlab)
自动驾驶 阿克曼转向系统
考虑车辆的运动学、几何学约束
DWA算法一般用于局部路径规划,该算法在速度空间内采样线速度和角速度,并根据车辆的运动学模型预测其下一时间间隔的轨迹。
对待评价轨迹进行评分,从而获得更加安全、平滑的最优局部路径。
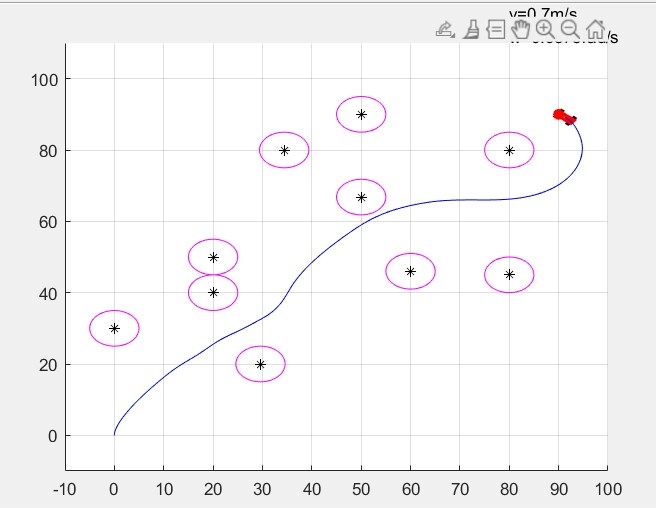
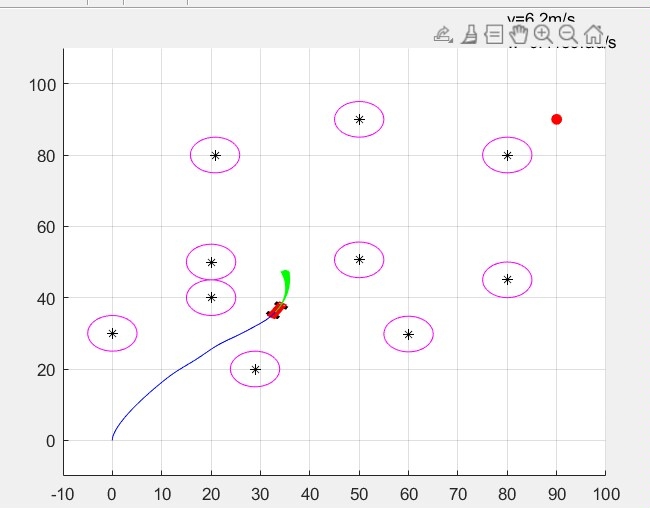
本代码可实时展示DWA算法规划过程中车辆备选轨迹的曲线、运动轨迹等,具有较好的可学性,移植性。
代码清楚简洁,方便更改使用!可在此基础上进行算法的优化。
ID:5880683402310051
圣诞小老鼠
动态、静态障碍物局部路径规划(matlab)
在自动驾驶领域,局部路径规划是一个关键的技术问题。在实际的行驶过程中,车辆需要根据当前的位置和环境状况,规划一条安全、平滑的局部路径,以避免碰撞障碍物并实现目标位置的到达。为了实现这个目标,我们需要考虑车辆的运动学和几何学约束,以及周围动态和静态障碍物的影响。
DWA算法(Dynamic Window Approach)是一种常用的局部路径规划算法。该算法基于车辆的运动学模型,在速度空间内采样线速度和角速度,然后根据车辆的运动学模型预测其下一时间间隔的轨迹。在规划过程中,对备选轨迹进行评分,从而获得最优的局部路径,使车辆能够安全、平滑地行驶。
本文提供的代码是一个基于DWA算法的局部路径规划模块,可实时展示规划过程中车辆备选轨迹的曲线、运动轨迹等信息。该代码具有较好的可学性和移植性,可以方便地在不同场景下进行使用和修改。同时,代码设计清晰简洁,方便进行算法的优化和扩展。
在使用本代码进行局部路径规划时,首先需要定义车辆的运动学和几何学约束。这些约束包括车辆的最大速度、最大角速度等。在规划过程中,算法会根据车辆的当前状态和周围环境的信息,计算出一组备选轨迹。然后,根据评价函数对备选轨迹进行评分,得到最优的局部路径。评价函数通常包括考虑安全性的因素,如与障碍物的距离和速度的平滑性等。
在代码的实现过程中,我们采用matlab作为开发工具。matlab具有丰富的数学计算和可视化功能,非常适合用于算法的实现和调试。同时,matlab也提供了许多方便的工具箱和函数,可以帮助我们快速地实现局部路径规划算法。
代码的结构清晰明了,包括输入数据的读取、参数的初始化、规划过程的实现等。在运行代码时,我们可以通过简单的参数调整来修改算法的行为,比如调整最大速度、最大角速度等。同时,代码还提供了可视化界面,可以实时展示车辆的运动轨迹和备选轨迹的曲线。
总之,本文介绍了一个基于DWA算法的局部路径规划代码,该代码能够实现自动驾驶车辆的局部路径规划功能。代码设计清晰简洁,易于理解和修改。通过调整参数和优化算法,可以进一步提高路径规划的性能和效果。相信这个代码将对自动驾驶领域的研究和开发工作起到积极的推动作用。
相关的代码,程序地址如下:http://fansik.cn/683402310051.html
















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









