






欢迎关注「苏南下」
在这里分享我的旅行和影像创作心得
大阪、京都和奈良,俗称【京阪奈】,是日本关西有名的三个城市,也是许多游客到日本喜欢去的打卡点。
三座城市彼此挨地很近,车程都在1小时以内,很方便。

除了距离近之外,更特别的是三座城市各有各的特色,游玩起来体验也不同,我每次去关西几乎都会去这些地方。
大阪,是日本仅次于东京的第二大城市,关西第一大城市。除了都市繁华,还有大阪城公园、通天阁、心斋桥等许多景点,喜欢热闹的话,在大阪玩就对了。



京都,是日本千年古都。从公元794年至1869年,一直是日本的首都。不过以前不叫「京都」,叫「平安京」。当初在建设时,是仿照唐代西京长安和东都洛阳而建,所以许多游客去到京都时,感慨好像穿越回了唐朝。



奈良,这座城市的名片是【鹿】,几乎所有游客到奈良都是为了去奈良公园,摸摸自由自在生活的鹿。其实,奈良在公元710-794年也曾是日本首都,在京都之前。奈良公园的鹿也就是从那个时候开始出现,代代繁衍至今已经超过1300年,被称为「神的使者」。



接下来,我会不定期开启【京阪奈旅拍小团】,带大家去深度游玩这几个城市。
在大阪,除了带大家打卡各个有名景点,还会去到动漫里的街道小巷,去体验日本居酒屋的浓厚氛围,去看一场完美的海景日落。










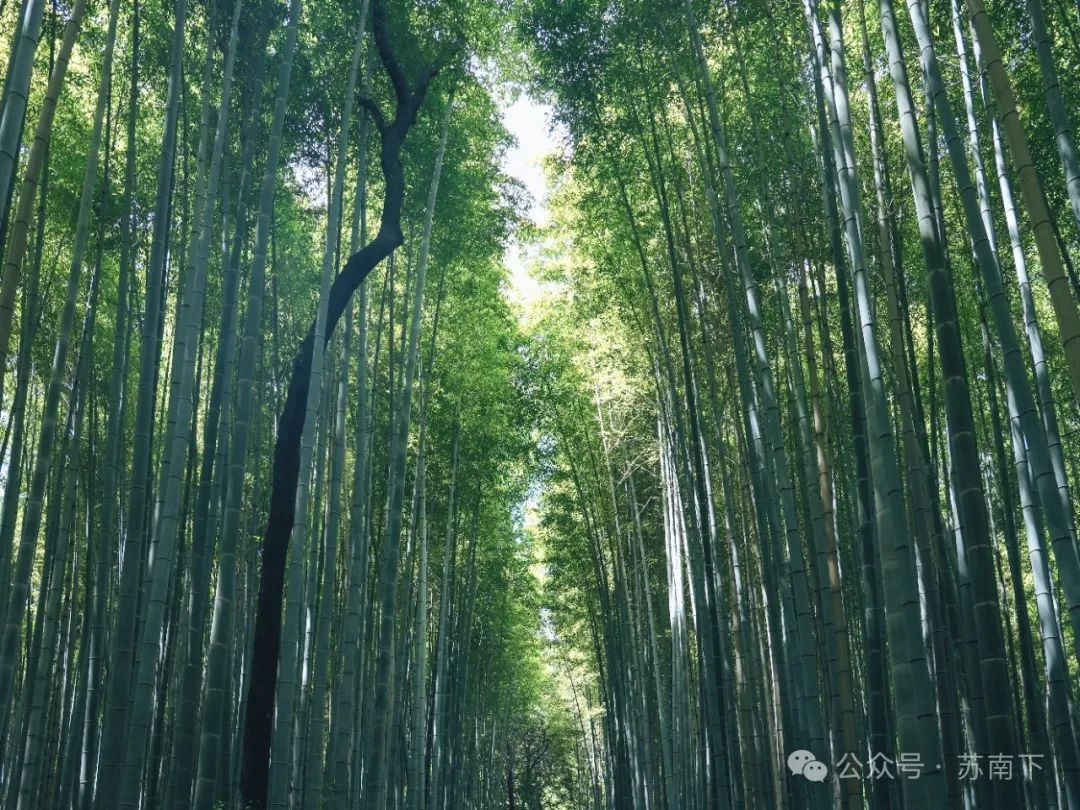
在京都,我们去拍没有游客的二三年坂和清水寺,去柯南里的伏见稻荷大社千本鸟居,去鸭川晒晒太阳,去岚山竹林感受清凉。







在奈良,我们去近距离地摸鹿,躺在公园里吸氧,去徒步俯瞰全城。







受限于篇幅,还有很多照片我没有贴出来。下面说下旅行细节。
【关于行程】
每次行程的出行天数不固定。最近的出行计划是9月【中秋节】,4天3晚行程。
9.14day1:当天任意时间飞到大阪都可以,入住酒店
day2:京都一日游
day3:奈良一日游
9.17day4:大阪游&回国
【关于团费】
旅行小团的费用主要包括:全程精品酒店住宿、日常三餐、景点门票、地铁火车交通、旅行保险以及我的摄影指导等。
小团人数:8人以内,保证游玩体验
出行方式:搭乘当地公共交通为主
集散地点:大阪
若感兴趣,欢迎加我微信【suke1900】了解具体团费。
前3名率先报名参团的小伙伴,每人优惠200元。

扫码报名
如果你计划和我一起开启关西之旅,可以说从报名后开始,你就不用操心吃、住、行的问题,也不用费心去做攻略了。因为我是一个攻略规划细节控,会提前制定好所有的行程计划,尽量让你在行程中玩地开心,拥有一段难忘的旅行体验。

















 1645
1645

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









