






文章目录
一 实验原理
HC-SR04 超声波测距模块可提供 2cm-400cm 的非接触式距离感测功能,测距精度可达高到的非接触式距离感测功能,测距精度可达高到 3mm ;模块包括超声波发射器、接收器与控制电路。
HC-SR04超声波测距模块共有四个引脚(见下图):
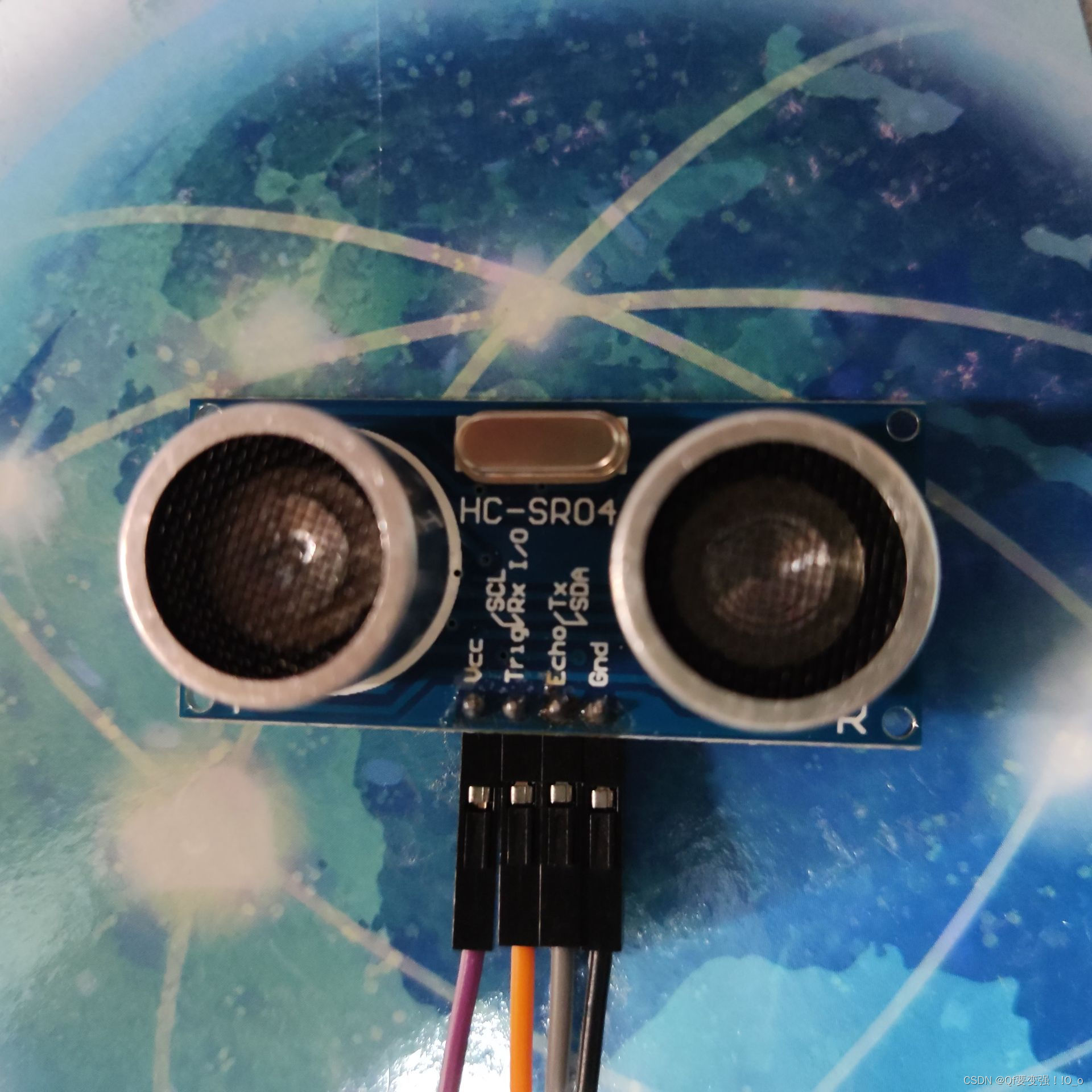

- Vcc:电源供电
- Trig:输入触发信号(可以触发测距)
- Echo:传出信号回响(可以传回时间差)
- GND:接地
工作流程大概就是:
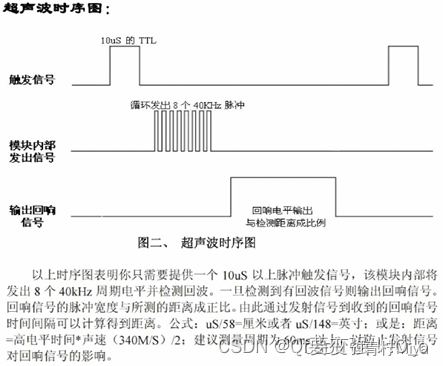
(1) IO 口TRIG 触发测距,给最少 10us 的高电平;
(2)模块自动发送 8 个 40khz 的方波,自动检测是否有信号返回;
(3)有信号返回,通过 IO 口 ECHO 输出一个高电平,高电平持续的时间就是超声波从发射到返回的时间。测试距离=(高电平时间*声速(340M/S))/2;
二 设计思路
2.1 思路
首先FPGA需要给超声波提供一个10us以上的触发信号(需要实现的),告诉超声波开始测距,超声波通过trigger口接收到信号后,就自动循环发出8个40KHz(200us)的周期电平(超声波模块实现的,不需要verilog实现)然后检测回波,如果超声波模块检测到了回波,就会通过echo输出口,输出一个回响信号,该回响会持续信号发射到接收时间长度的高电平。所以需要一个计时器来记录这段高电平持续(FPGA需要实现的,接收到echo上升沿后就开启计时,下降沿就停止)的时间长短。得到这个时间后就可以通过计算公式计算出大致的距离。
- 10us以上的计数器发送高电平
- echo计数器计时上升沿(触发)到下降沿的时间
- echo计数器的最大值是多少(可以根据超声波测试的距离设定,由上可知,超声波最远4m,计算可得持续时间最大值应该是8/340*10^3 = 24ms左右,可设定为30ms)
- 时间基数都是以us为单位,fpga的基频是50MHz(20ns),分频到1MHz(1us)。
三 hc_sr代码实现
3.1 时钟分频
module clk_div(
input wire clk,
input wire rst_n,
output reg clk_us
);
parameter CNT_MAX = 5'd25; //1us有50个时钟周期,一半一半
reg [4:0] cnt;
wire add_cnt;
wire end_cnt;
always @(posedge clk or negedge rst_n)begin
if(!rst_n)begin
cnt <= 0;
clk_us <= 1'b0;
end
else if(add_cnt)begin
if(end_cnt)begin
clk_us <= ~clk_us;//取反
cnt <= 0;
end
else begin
cnt <= cnt + 1'b1;
end
end
else begin
cnt <= cnt;
end
end
assign add_cnt = 1'b1;
assign end_cnt = add_cnt && cnt == CNT_MAX - 1;
endmodule
3.2 hc_sr发送trig
//发送15us的触发信号给hc_sr
module hc_sr_trig (
input wire clk_us,
input wire rst_n,
output wire trig_out
);
//接收一次信号最长间隔时间是:
//发送8个40KHz是200us。
//最长距离是400cm,来回时长为24ms左右
//设定间隔为30ms发送一次trig
//则需要时钟1MHz个数30_000
parameter MAX_CNT = 15'd30_000;
//定义一个计数器
reg [14:0] cnt;
wire add_cnt;
wire end_cnt;
always @(posedge clk_us or negedge rst_n)begin
if(!rst_n)begin
cnt <= 0;
end
else if(add_cnt)begin
if(end_cnt)begin
cnt <= 0;
end
else begin
cnt <= cnt + 1'b1;
end
end
else begin
cnt <= cnt;
end
end
assign add_cnt = 1'b1;
assign end_cnt = add_cnt && cnt == MAX_CNT - 1;
assign trig_out = cnt <15 ? 1'b1 : 1'b0;//发送15us的高电平
endmodule
3.3 hc_sr接收echo,输出距离
//接收hc_sr的echo信号,并解析数据
module hc_sr_echo (
input wire clk ,
input wire clk_us ,
input wire rst_n ,
input wire echo ,
output reg [24:0] data_out //距离单位为cm,乘以1000的值
);
//echo最多测量400cm
parameter MAX_ECHO = 15'd25_000;
//检测下降沿
reg r1_echo, r2_echo;
wire echo_pos, echo_neg;
reg [14:0] cnt ;
wire add_cnt;
wire end_cnt;
always @(posedge clk or negedge rst_n)begin
if(!rst_n)begin
r1_echo <= 0;
r2_echo <= 0;
end
//打拍,延时一个时钟周期
else begin
r1_echo <= echo;
r2_echo <= r1_echo;
end
end
//如果r2_echo为1,并且r1_echo为0,则此时为下降沿
assign echo_neg = r2_echo & ~r1_echo;
//如果r1_echo为1,并且r2_echo为0,则此时为上升沿
assign echo_pos = ~r2_echo & r1_echo;
//当echo为1时开始计数
always @(posedge clk_us or negedge rst_n)begin
if(!rst_n)begin
cnt <= 0;
end
else if(add_cnt)begin
if(end_cnt)begin
cnt <= cnt;//如果没有检测到障碍物,cnt就保持
end
else begin
cnt <= cnt + 1'b1;
end
end
else begin
cnt <= 0;
end
end
assign add_cnt = echo;
assign end_cnt = add_cnt && cnt == MAX_ECHO - 1;
//当检测到下降沿的时候,就开始计算距离
//cnt最高计数为25_000us,换算成距离,t=cnt * 10^(-3)*34/2(cm)
//最大数值为t = cnt*17/1000
always @(posedge clk or negedge rst_n)begin
if(!rst_n)begin
data_out <= 0;
end
else if(echo_neg)begin
data_out <= (cnt << 4) + cnt;//cnt*17
end
else begin
data_out <= data_out;
end
end
endmodule
3.4 hc_sr的顶层模块
module hc_sr_driver (
input wire clk,
input wire rst_n,
input wire echo,
output wire trig_out,
output wire [24:0] data_out//实际距离还需要除以1000
);
wire clk_us;
clk_div clk_div_inst (
.clk (clk) ,
.rst_n (rst_n) ,
.clk_us (clk_us)
);
hc_sr_trig hc_sr_trig_inst (
.clk_us (clk_us) ,
.rst_n (rst_n) ,
.trig_out (trig_out)
);
hc_sr_echo hc_sr_echo_inst (
.clk (clk) ,
.clk_us (clk_us) ,
.rst_n (rst_n) ,
.echo (echo) ,
.data_out (data_out)//距离单位cm乘以1000的值
);
endmodule
四 数码管显示代码实现
DE115的数码管和之前使用的板子不同,数码管不再是片选和段选选中,DE115上的是分开的,所以需要考虑8个单独的数码管。代码如下:
module sel_driver(
input wire Clk ,
input wire Rst_n ,
input wire [24:0] data_o ,
output wire [6:0] hex1 ,
output wire [6:0] hex2 ,
output wire [6:0] hex3 ,
output wire [6:0] hex4 ,
output wire [6:0] hex5 ,
output wire [6:0] hex6 ,
output wire [6:0] hex7 ,
output wire [6:0] hex8
);
parameter NOTION = 4'd10,
FUSHU = 4'd11;
parameter MAX20us = 10'd1000;
reg [9:0] cnt_20us;
reg [7:0] sel_r;
reg [3:0] number;
reg [6:0] seg_r;
reg [6:0] hex1_r;
reg [6:0] hex2_r;
reg [6:0] hex3_r;
reg [6:0] hex4_r;
reg [6:0] hex5_r;
reg [6:0] hex6_r;
reg [6:0] hex7_r;
reg [6:0] hex8_r;
//20微妙计数器
always @(posedge Clk or negedge Rst_n) begin
if (!Rst_n) begin
cnt_20us <= 10'd0;
end
else if (cnt_20us == MAX20us - 1'd1) begin
cnt_20us <= 10'd0;
end
else begin
cnt_20us <= cnt_20us + 1'd1;
end
end
//单个信号sel_r位拼接约束
always @(posedge Clk or negedge Rst_n) begin
if (!Rst_n) begin
sel_r <= 8'b11_11_11_10;
end
else if (cnt_20us == MAX20us - 1'd1) begin
sel_r <= {sel_r[6:0],sel_r[7]};
end
else begin
sel_r <= sel_r;
end
end
/*拿到数字*/
always @(*) begin
case (sel_r)
8'b11_11_11_10: number = data_o/100_000 ;//百位
8'b11_11_11_01: number = (data_o%100_000)/10_000 ;//十位
8'b11_11_10_11: number = (data_o%10_000)/1_000 ;//个位cm
8'b11_11_01_11: number = FUSHU ;//表示小数点
8'b11_10_11_11: number = (data_o%1_000)/1_00 ;
8'b11_01_11_11: number = (data_o%1_00)/1_0 ;
8'b10_11_11_11: number = data_o%10 ;
default: number = 4'd0 ;
endcase
end
/*通过数字解析出seg值*/
always @(*) begin
case (number)
4'd0 : seg_r = 7'b100_0000;
4'd1 : seg_r = 7'b111_1001;
4'd2 : seg_r = 7'b010_0100;
4'd3 : seg_r = 7'b011_0000;
4'd4 : seg_r = 7'b001_1001;
4'd5 : seg_r = 7'b001_0010;
4'd6 : seg_r = 7'b000_0010;
4'd7 : seg_r = 7'b111_1000;
4'd8 : seg_r = 7'b000_0000;
4'd9 : seg_r = 7'b001_0000;
NOTION : seg_r = 7'b111_1111;
FUSHU : seg_r = 7'b011_1111;
default : seg_r = 7'b111_1111;
endcase
end
always @(*) begin
case (sel_r)
8'b11_11_11_10: hex1_r = seg_r;
8'b11_11_11_01: hex2_r = seg_r;
8'b11_11_10_11: hex3_r = seg_r;
8'b11_11_01_11: hex4_r = seg_r;
8'b11_10_11_11: hex5_r = seg_r;
8'b11_01_11_11: hex6_r = seg_r;
8'b10_11_11_11: hex7_r = seg_r;
8'b01_11_11_11: hex8_r = seg_r;
default: seg_r = seg_r;
endcase
end
assign hex1 = hex1_r;
assign hex2 = hex2_r;
assign hex3 = hex3_r;
assign hex4 = hex4_r;
assign hex5 = hex5_r;
assign hex6 = hex6_r;
assign hex7 = hex7_r;
assign hex8 = hex8_r;
endmodule
五 顶层
module top (
input wire clk ,
input wire rst_n ,
input wire echo ,
output wire trig_out,
output wire [6:0] hex1 ,
output wire [6:0] hex2 ,
output wire [6:0] hex3 ,
output wire [6:0] hex4 ,
output wire [6:0] hex5 ,
output wire [6:0] hex6 ,
output wire [6:0] hex7 ,
output wire [6:0] hex8 ,
output wire beep ,
output wire [3:0] led
);
wire [24:0] data_out;
hc_sr_driver hc_sr_driver_inst(
.clk (clk),
.rst_n (rst_n),
.echo (echo),
.trig_out (trig_out),
.data_out (data_out)
);
sel_driver sel_driver_inst(
.Clk (clk ),
.Rst_n (rst_n ),
.data_o (data_out ),
.hex1 (hex1),
.hex2 (hex2),
.hex3 (hex3),
.hex4 (hex4),
.hex5 (hex5),
.hex6 (hex6),
.hex7 (hex7),
.hex8 (hex8)
);
endmodule
六 tcl文件
package require ::quartus::project
set_location_assignment PIN_Y2 -to clk
set_location_assignment PIN_M23 -to rst_n
set_location_assignment PIN_AC15 -to echo
set_location_assignment PIN_AB22 -to trig_out
set_location_assignment PIN_AA14 -to hex1[6]
set_location_assignment PIN_AG18 -to hex1[5]
set_location_assignment PIN_AF17 -to hex1[4]
set_location_assignment PIN_AH17 -to hex1[3]
set_location_assignment PIN_AG17 -to hex1[2]
set_location_assignment PIN_AE17 -to hex1[1]
set_location_assignment PIN_AD17 -to hex1[0]
set_location_assignment PIN_AC17 -to hex2[6]
set_location_assignment PIN_AA15 -to hex2[5]
set_location_assignment PIN_AB15 -to hex2[4]
set_location_assignment PIN_AB17 -to hex2[3]
set_location_assignment PIN_AA16 -to hex2[2]
set_location_assignment PIN_AB16 -to hex2[1]
set_location_assignment PIN_AA17 -to hex2[0]
set_location_assignment PIN_AH18 -to hex3[6]
set_location_assignment PIN_AF18 -to hex3[5]
set_location_assignment PIN_AG19 -to hex3[4]
set_location_assignment PIN_AH19 -to hex3[3]
set_location_assignment PIN_AB18 -to hex3[2]
set_location_assignment PIN_AC18 -to hex3[1]
set_location_assignment PIN_AD18 -to hex3[0]
set_location_assignment PIN_AE18 -to hex4[6]
set_location_assignment PIN_AF19 -to hex4[5]
set_location_assignment PIN_AE19 -to hex4[4]
set_location_assignment PIN_AH21 -to hex4[3]
set_location_assignment PIN_AG21 -to hex4[2]
set_location_assignment PIN_AA19 -to hex4[1]
set_location_assignment PIN_AB19 -to hex4[0]
set_location_assignment PIN_Y19 -to hex5[6]
set_location_assignment PIN_AF23 -to hex5[5]
set_location_assignment PIN_AD24 -to hex5[4]
set_location_assignment PIN_AA21 -to hex5[3]
set_location_assignment PIN_AB20 -to hex5[2]
set_location_assignment PIN_U21 -to hex5[1]
set_location_assignment PIN_V21 -to hex5[0]
set_location_assignment PIN_W28 -to hex6[6]
set_location_assignment PIN_W27 -to hex6[5]
set_location_assignment PIN_Y26 -to hex6[4]
set_location_assignment PIN_W26 -to hex6[3]
set_location_assignment PIN_Y25 -to hex6[2]
set_location_assignment PIN_AA26 -to hex6[1]
set_location_assignment PIN_AA25 -to hex6[0]
set_location_assignment PIN_U24 -to hex7[6]
set_location_assignment PIN_U23 -to hex7[5]
set_location_assignment PIN_W25 -to hex7[4]
set_location_assignment PIN_W22 -to hex7[3]
set_location_assignment PIN_W21 -to hex7[2]
set_location_assignment PIN_Y22 -to hex7[1]
set_location_assignment PIN_M24 -to hex7[0]
set_location_assignment PIN_H22 -to hex8[6]
set_location_assignment PIN_J22 -to hex8[5]
set_location_assignment PIN_L25 -to hex8[4]
set_location_assignment PIN_L26 -to hex8[3]
set_location_assignment PIN_E17 -to hex8[2]
set_location_assignment PIN_F22 -to hex8[1]
set_location_assignment PIN_G18 -to hex8[0]
七 实现效果
总结
从实验结果观察发现测量距离同实际还是具有一定的误差,可能是由传感器本身的噪声、回波的多路径传播、环境的干扰等原因造成。
参考资料
HC-SR04超声波测距模块的原理
基于DE2 115开发板驱动HC_SR04超声波测距模块【附源码】
【嵌入式系统应用开发】FPGA——基于HC-SR04超声波测距















 5550
5550

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









