







本帖主要是记录自己的想法,如果有更好的建议请留言,目的为了实现对电机的加减速和步数控制,使用两个timer主要是想保证脉冲的稳定性以及不受主循环的延时和过多的中断影响,
期望的波形如下:
前一段为马达加速,中间恒速,最后减速
测试用芯片为STM32F446:
使用STM32CubeMX产生原始代码,使用Timer1和Timer2.
Clock设定如下:
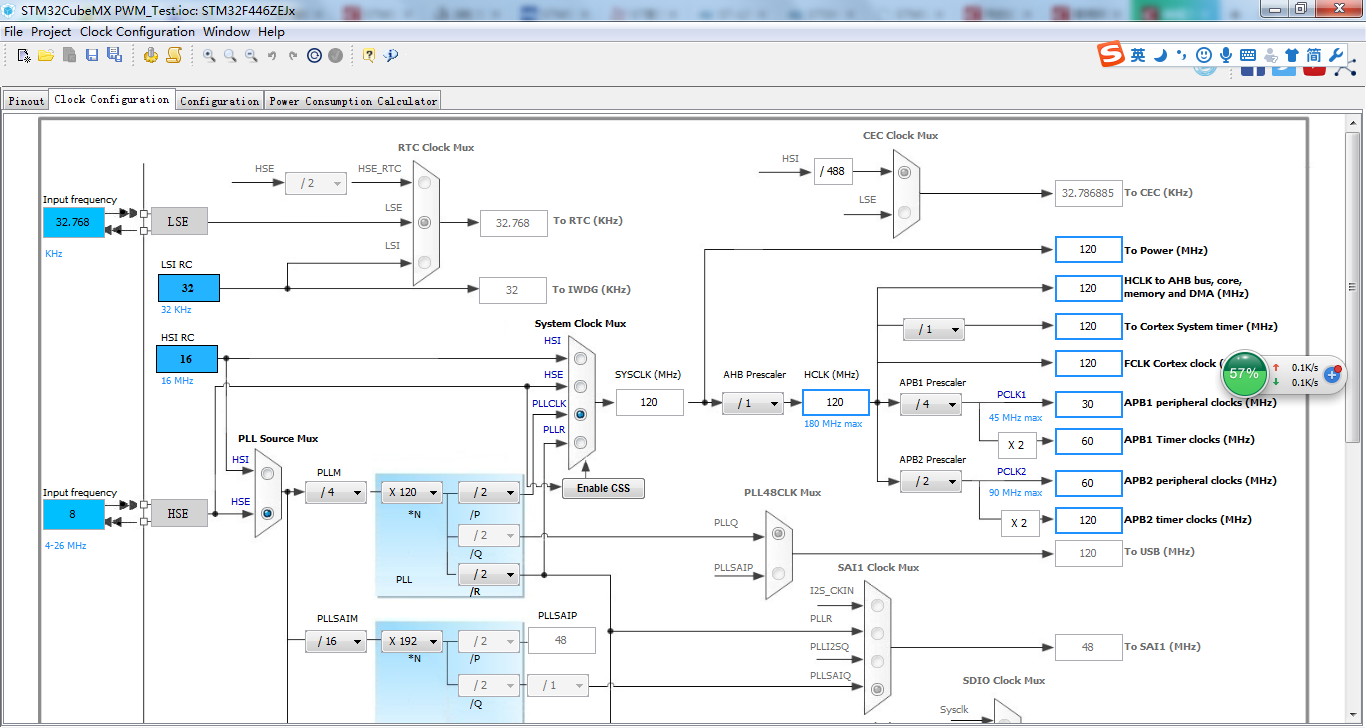
Timer设定:
使用Timer1产生PWM波形,但不使用中断,Timer2使用中断,定期地改变Timer1的计数周期,Timer2必须设定为Slave mode,Trigger source设定为ITR0,如下图:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 4830
4830











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









