







20240603在飞凌的OK3588-C开发板上跑原厂IPC方案调通OV5645和OV13850
2024/6/3 15:07
【整理完成之后,突然发现没有针对ov13850.c做任何改动,不过它确实可以通过以太网推流了。】
【但是由于没有进行ISP配置,电脑上的VLC通过rtsp最后拿到的是绿油油的鬼影!^_】
rootroot@rootroot-ThinkBook-16-G5-IRH:~/RK3588_IPC_SDK$ ./build.sh lunch
Which would you like? [0]: 3
rootroot@rootroot-ThinkBook-16-G5-IRH:~/RK3588_IPC_SDK$ ./build.sh
Z:\RK3588_IPC_SDK\project\app\rkipc\rkipc\src\rk3588_ipc\main.c
Z:\RK3588_IPC_SDK\project\app\rkipc\rkipc\src\rk3588_multi_ipc\main.c
1、
Z:\RK3588_IPC_SDK\sysdrv\source\kernel\arch\arm64\boot\dts\rockchip\rk3588-nvr-demo.dtsi
&i2c2 {
status = "okay";
extio: tca6424@23 {
compatible = "ti,tca6424";
reg = <0x23>;
interrupt-parent = <&gpio1>;
interrupts = <RK_PA4 IRQ_TYPE_EDGE_FALLING>;
gpio-controller;
pinctrl-0 = <&extio_int_gpio>;
pinctrl-names = "default";
#gpio-cells = <2>;
status = "okay";
};
vdd_npu_s0: vdd_npu_mem_s0: rk8602@42 {
compatible = "rockchip,rk8602";
reg = <0x42>;
vin-supply = <&vcc5v0_sys>;
regulator-compatible = "rk860x-reg";
regulator-name = "vdd_npu_s0";
regulator-min-microvolt = <550000>;
regulator-max-microvolt = <950000>;
regulator-ramp-delay = <2300>;
rockchip,suspend-voltage-selector = <1>;
regulator-boot-on;
regulator-always-on;
regulator-state-mem {
regulator-off-in-suspend;
};
};
};
&pinctrl {
dp {
dp1_hdmi_ctl: dp-hdmi-ctl {
rockchip,pins = <0 RK_PD5 RK_FUNC_GPIO &pcfg_pull_up>,
<3 RK_PB2 RK_FUNC_GPIO &pcfg_pull_up>;
};
};
extio {
extio_int_gpio: extio-int-gpio {
rockchip,pins = <1 RK_PA4 RK_FUNC_GPIO &pcfg_pull_up>;
};
};
rtc {
rtc_int: rtc-int {
rockchip,pins = <0 RK_PB2 RK_FUNC_GPIO &pcfg_pull_up>;
};
};
usb {
vcc5v0_host_en: vcc5v0-host-en {
rockchip,pins = <4 RK_PB0 RK_FUNC_GPIO &pcfg_pull_none>;
};
vcc5v0_otg_en: vcc5v0-otg-en {
rockchip,pins = <4 RK_PA7 RK_FUNC_GPIO &pcfg_pull_none>;
};
};
sata {
sata0_pm_reset: sata0-pm-reset {
rockchip,pins = <4 RK_PA0 RK_FUNC_GPIO &pcfg_output_high>;
};
sata1_pm_reset: sata1-pm-reset {
rockchip,pins = <4 RK_PA1 RK_FUNC_GPIO &pcfg_output_high>;
};
};
};
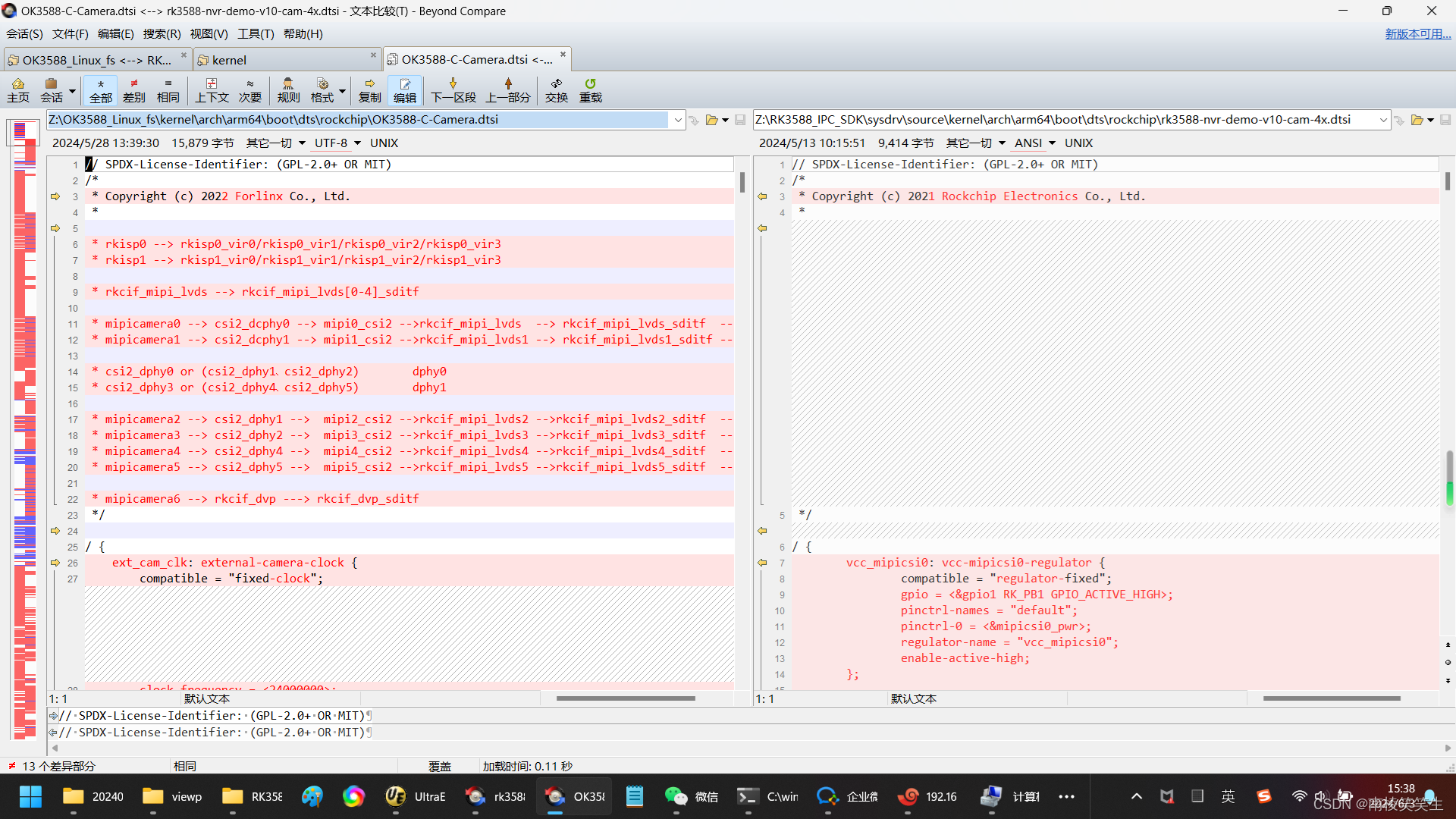
【当时时间追的紧,直接使用飞凌的camera摄像头相关的DTS直接替换,通了!^_】
Z:\OK3588_Linux_fs\kernel\arch\arm64\boot\dts\rockchip\OK3588-C-Camera.dtsi
Z:\RK3588_IPC_SDK\sysdrv\source\kernel\arch\arm64\boot\dts\rockchip\rk3588-nvr-demo-v10-cam-4x.dtsi


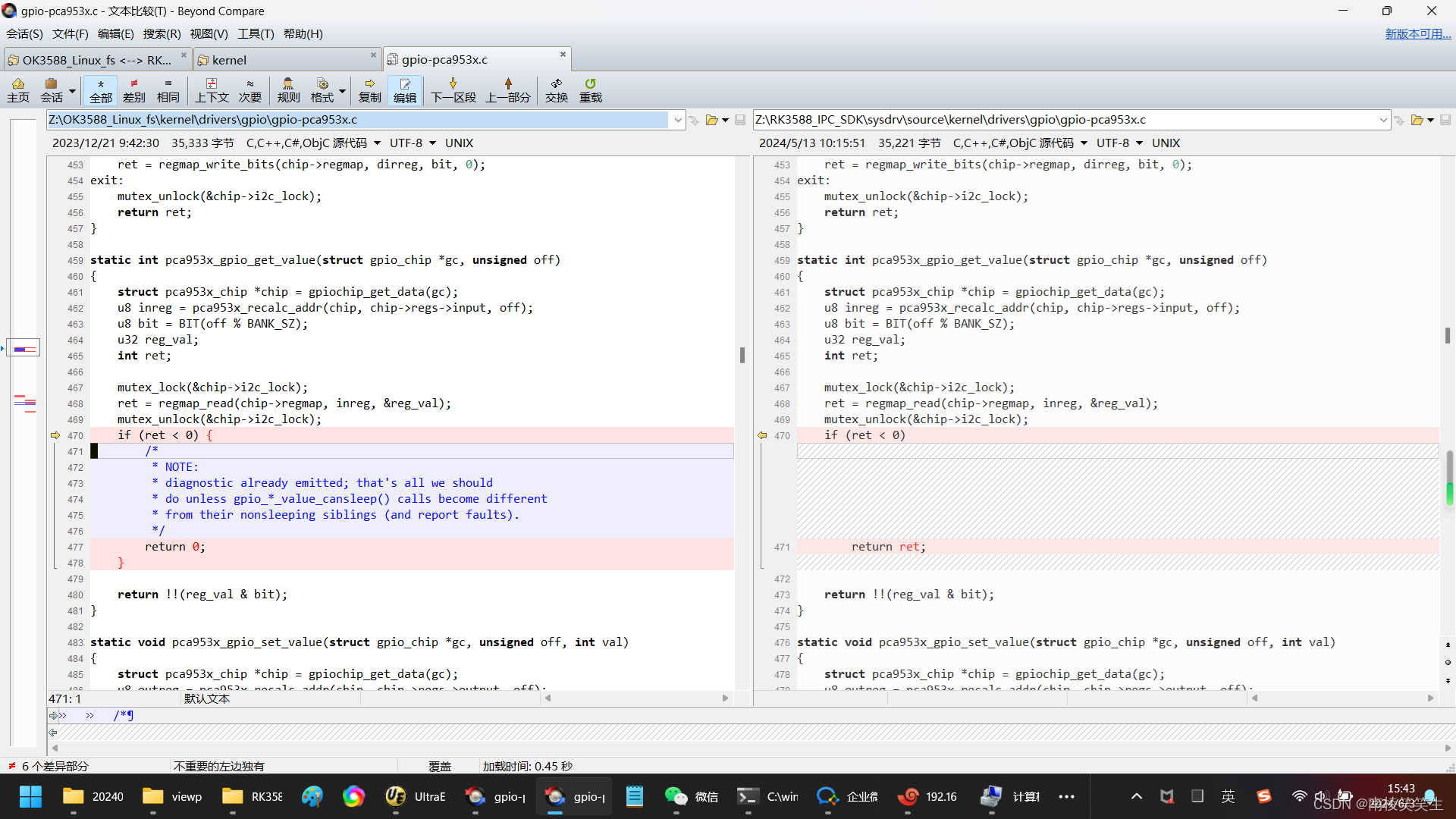
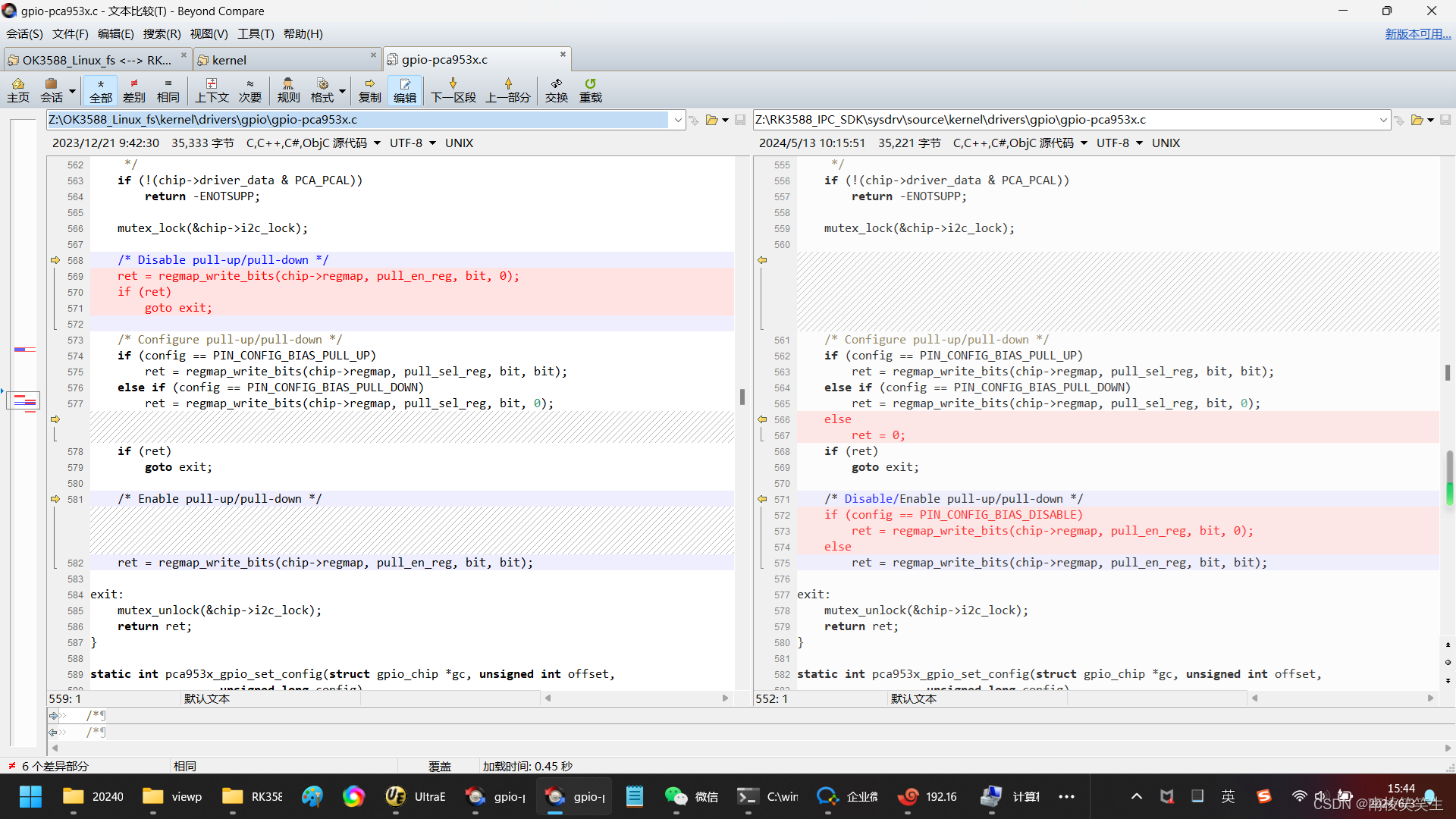
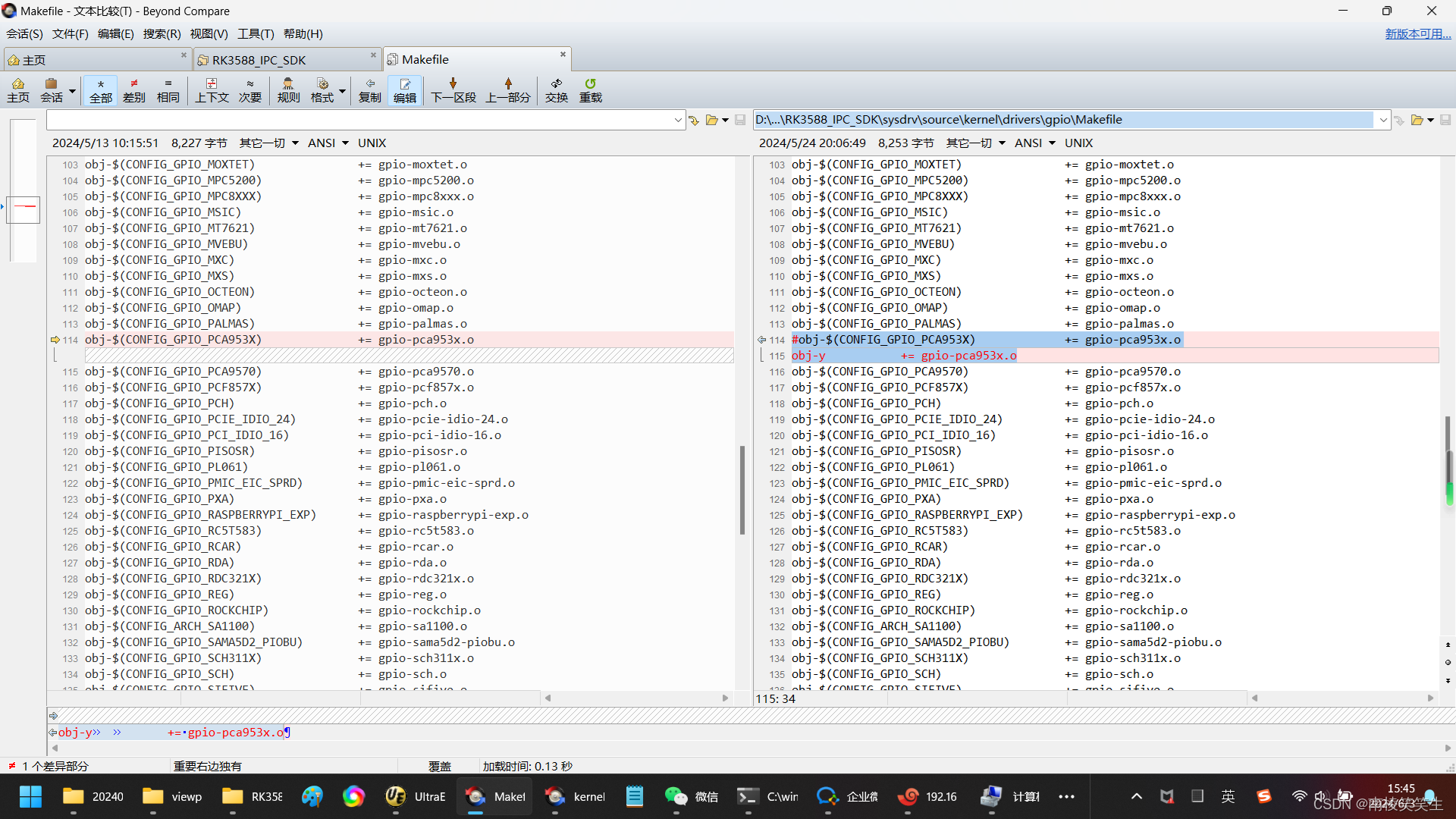
2、有不同点,为了省事,直接使用飞凌的覆盖。同时在Makefile中强制打开pca953x!
Z:\RK3588_IPC_SDK\sysdrv\source\kernel\drivers\gpio\gpio-pca953x.c
Z:\RK3588_IPC_SDK\sysdrv\source\kernel\drivers\gpio\gpio-pca953x.c
Z:\RK3588_IPC_SDK\sysdrv\source\kernel\drivers\gpio\Makefile
obj-$(CONFIG_GPIO_OCTEON) += gpio-octeon.o
obj-$(CONFIG_GPIO_OMAP) += gpio-omap.o
obj-$(CONFIG_GPIO_PALMAS) += gpio-palmas.o
#obj-$(CONFIG_GPIO_PCA953X) += gpio-pca953x.o
obj-y += gpio-pca953x.o
obj-$(CONFIG_GPIO_PCA9570) += gpio-pca9570.o
obj-$(CONFIG_GPIO_PCF857X) += gpio-pcf857x.o
obj-$(CONFIG_GPIO_PCH) += gpio-pch.o
【不改之类,编译不过,DTS里面会有变量未定义的!好不容易百度找到了!】
Z:\OK3588_Linux_fs\kernel\include\dt-bindings\pinctrl\rockchip.h
Z:\RK3588_IPC_SDK\sysdrv\source\kernel\include\dt-bindings\pinctrl\rockchip.h
/* SPDX-License-Identifier: GPL-2.0-or-later */
/*
* Header providing constants for Rockchip pinctrl bindings.
*
* Copyright (c) 2013 MundoReader S.L.
* Author: Heiko Stuebner <heiko@sntech.de>
*/
#ifndef __DT_BINDINGS_ROCKCHIP_PINCTRL_H__
#define __DT_BINDINGS_ROCKCHIP_PINCTRL_H__
#define RK_PA0 0
#define RK_PA1 1
#define RK_PA2 2
#define RK_PA3 3
#define RK_PA4 4
#define RK_PA5 5
#define RK_PA6 6
#define RK_PA7 7
#define RK_PB0 8
#define RK_PB1 9
#define RK_PB2 10
#define RK_PB3 11
#define RK_PB4 12
#define RK_PB5 13
#define RK_PB6 14
#define RK_PB7 15
#define RK_PC0 16
#define RK_PC1 17
#define RK_PC2 18
#define RK_PC3 19
#define RK_PC4 20
#define RK_PC5 21
#define RK_PC6 22
#define RK_PC7 23
#define RK_PD0 24
#define RK_PD1 25
#define RK_PD2 26
#define RK_PD3 27
#define RK_PD4 28
#define RK_PD5 29
#define RK_PD6 30
#define RK_PD7 31
#define RK_FUNC_GPIO 0
#define EXTIO_GPIO_P00 0
#define EXTIO_GPIO_P01 1
#define EXTIO_GPIO_P02 2
#define EXTIO_GPIO_P03 3
#define EXTIO_GPIO_P04 4
#define EXTIO_GPIO_P05 5
#define EXTIO_GPIO_P06 6
#define EXTIO_GPIO_P07 7
#define EXTIO_GPIO_P10 8
#define EXTIO_GPIO_P11 9
#define EXTIO_GPIO_P12 10
#define EXTIO_GPIO_P13 11
#define EXTIO_GPIO_P14 12
#define EXTIO_GPIO_P15 13
#define EXTIO_GPIO_P16 14
#define EXTIO_GPIO_P17 15
#define EXTIO_GPIO_P20 16
#define EXTIO_GPIO_P21 17
#define EXTIO_GPIO_P22 18
#define EXTIO_GPIO_P23 19
#define EXTIO_GPIO_P24 20
#define EXTIO_GPIO_P25 21
#define EXTIO_GPIO_P26 22
#define EXTIO_GPIO_P27 23
#endif
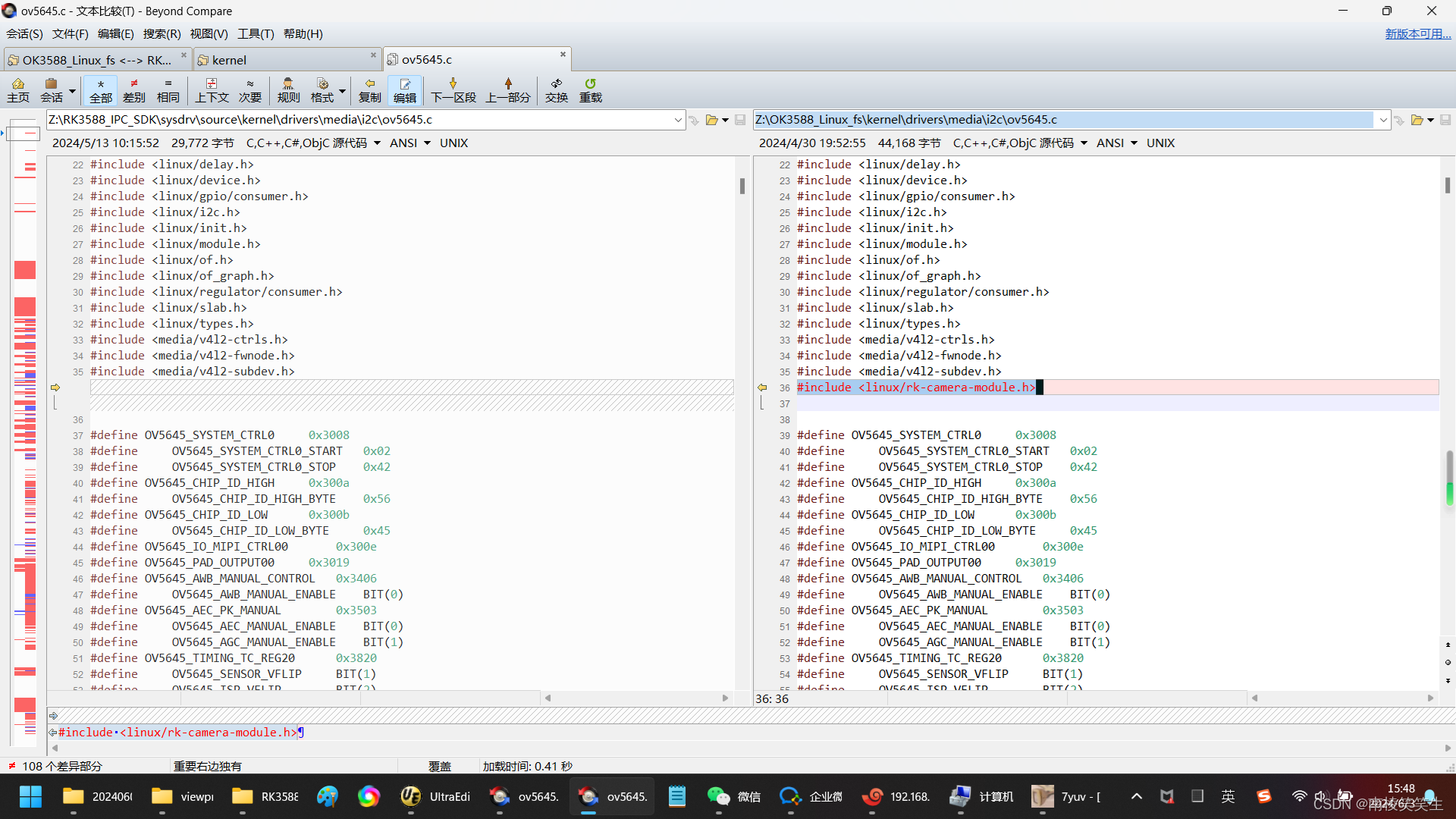
3、不用看了,ov5645.c差异太大了。根据经验,直接使用飞凌的ov5645的驱动替换掉了!
Z:\OK3588_Linux_fs\kernel\drivers\media\i2c\ov5645.c
Z:\RK3588_IPC_SDK\sysdrv\source\kernel\drivers\media\i2c\ov5645.c
【由于ov5645.c默认不编译,为了省事,我直接让它强制打开了!】
Z:\RK3588_IPC_SDK\sysdrv\source\kernel\drivers\media\i2c\Makefile
obj-$(CONFIG_VIDEO_OS02G10) += os02g10.o
obj-$(CONFIG_VIDEO_OS03B10) += os03b10.o
obj-$(CONFIG_VIDEO_OS04A10) += os04a10.o
obj-$(CONFIG_VIDEO_OS05A20) += os05a20.o
obj-$(CONFIG_VIDEO_OS08A20) += os08a20.o
obj-$(CONFIG_VIDEO_OV02B10) += ov02b10.o
obj-$(CONFIG_VIDEO_OV02K10) += ov02k10.o
obj-$(CONFIG_VIDEO_OV2640) += ov2640.o
obj-$(CONFIG_VIDEO_OV2680) += ov2680.o
obj-$(CONFIG_VIDEO_OV2685) += ov2685.o
obj-$(CONFIG_VIDEO_OV2718) += ov2718.o
obj-$(CONFIG_VIDEO_OV2740) += ov2740.o
obj-$(CONFIG_VIDEO_OV4686) += ov4686.o
obj-$(CONFIG_VIDEO_OV4688) += ov4688.o
obj-$(CONFIG_VIDEO_OV4689) += ov4689.o
obj-$(CONFIG_VIDEO_OV50C40) += ov50c40.o
obj-$(CONFIG_VIDEO_OV5640) += ov5640.o
#obj-$(CONFIG_VIDEO_OV5645) += ov5645.o
obj-y += ov5645.o
obj-$(CONFIG_VIDEO_OV5647) += ov5647.o
obj-$(CONFIG_VIDEO_OV5670) += ov5670.o
obj-$(CONFIG_VIDEO_OV5675) += ov5675.o
obj-$(CONFIG_VIDEO_OV5695) += ov5695.o
obj-$(CONFIG_VIDEO_OV6650) += ov6650.o
obj-$(CONFIG_VIDEO_OV7251) += ov7251.o
obj-$(CONFIG_VIDEO_OV7640) += ov7640.o
obj-$(CONFIG_VIDEO_OV7670) += ov7670.o
obj-$(CONFIG_VIDEO_OV772X) += ov772x.o
obj-$(CONFIG_VIDEO_OV7740) += ov7740.o
obj-$(CONFIG_VIDEO_OV8856) += ov8856.o
obj-$(CONFIG_VIDEO_OV8858) += ov8858.o
obj-$(CONFIG_VIDEO_OV9281) += ov9281.o
obj-$(CONFIG_VIDEO_OV9640) += ov9640.o
obj-$(CONFIG_VIDEO_OV9650) += ov9650.o
obj-$(CONFIG_VIDEO_OV12D2Q) += ov12d2q.o
obj-$(CONFIG_VIDEO_OV13850) += ov13850.o
obj-$(CONFIG_VIDEO_OV13855) += ov13855.o
obj-$(CONFIG_VIDEO_OV13858) += ov13858.o
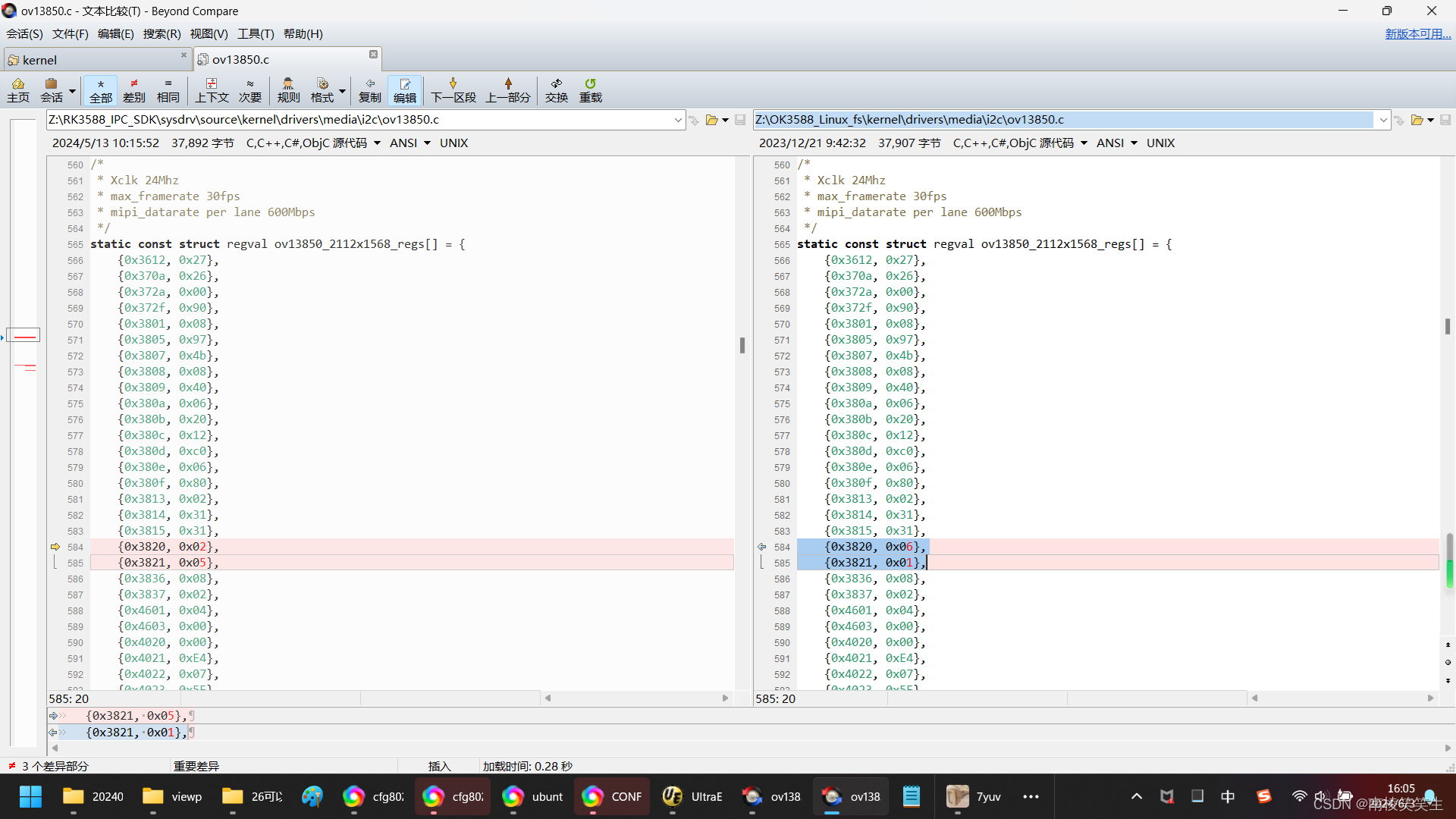
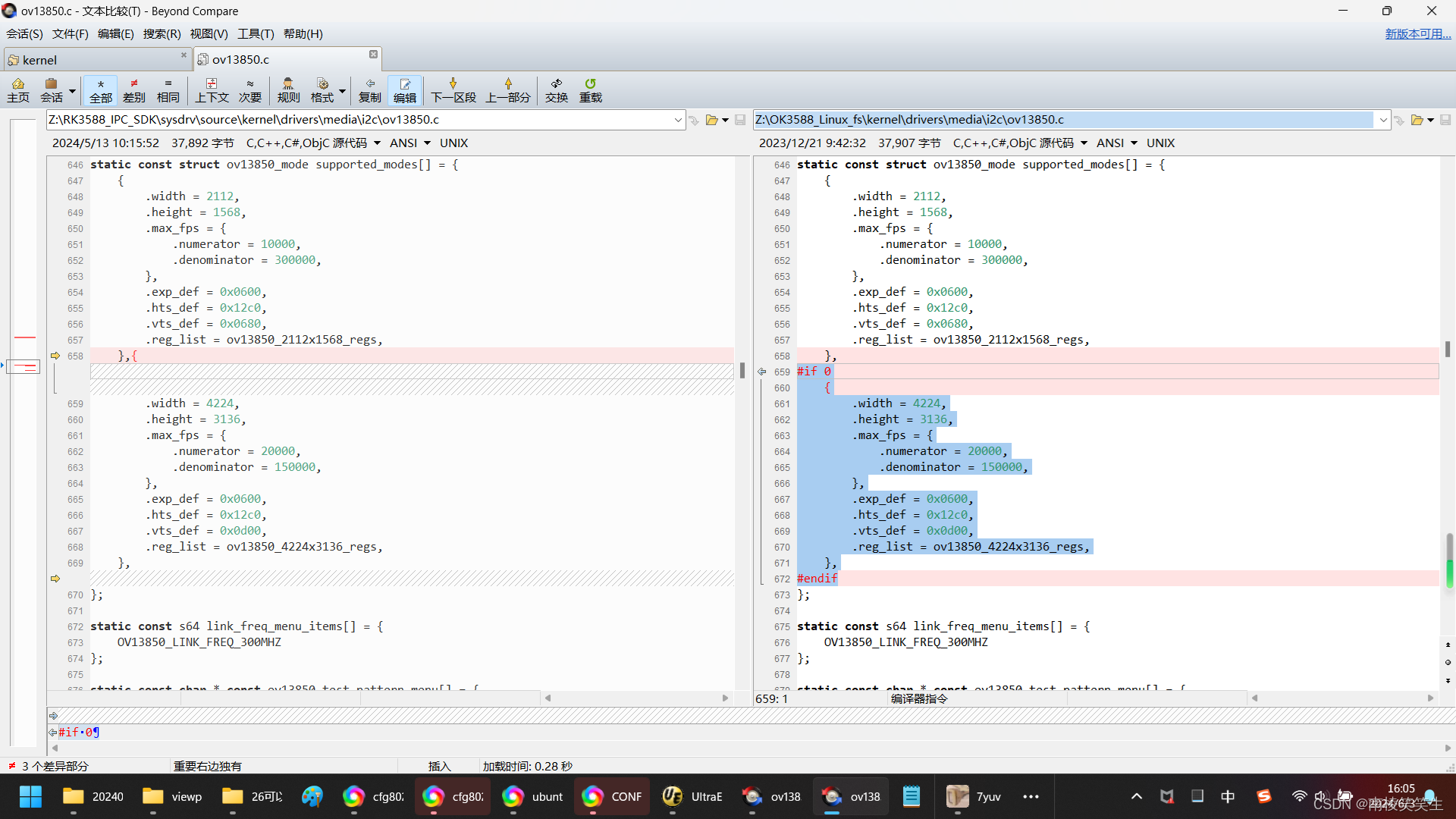
4、可能ov13850只使用了2lane,或者实际量产的时候达不到设计要求,不能完美的输出4K分辨率。
针对DATASHEET进行了减配!要想比较理想地进行4K录像,可以上同门OV13855了。
Z:\OK3588_Linux_fs\kernel\drivers\media\i2c\ov13850.c
Z:\RK3588_IPC_SDK\sysdrv\source\kernel\drivers\media\i2c\ov13850.c
/*
* Xclk 24Mhz
* max_framerate 30fps
* mipi_datarate per lane 600Mbps
*/
static const struct regval ov13850_2112x1568_regs[] = {
{0x3612, 0x27},
{0x370a, 0x26},
{0x372a, 0x00},
{0x372f, 0x90},
{0x3801, 0x08},
{0x3805, 0x97},
{0x3807, 0x4b},
{0x3808, 0x08},
{0x3809, 0x40},
{0x380a, 0x06},
{0x380b, 0x20},
{0x380c, 0x12},
{0x380d, 0xc0},
{0x380e, 0x06},
{0x380f, 0x80},
{0x3813, 0x02},
{0x3814, 0x31},
{0x3815, 0x31},
{0x3820, 0x06},
{0x3821, 0x01},
{0x3836, 0x08},
{0x3837, 0x02},
{0x4601, 0x04},
{0x4603, 0x00},
{0x4020, 0x00},
{0x4021, 0xE4},
{0x4022, 0x07},
{0x4023, 0x5F},
{0x4024, 0x08},
{0x4025, 0x44},
{0x4026, 0x08},
{0x4027, 0x47},
{0x4603, 0x01},
{0x5401, 0x61},
{0x5405, 0x40},
{REG_NULL, 0x00},
};
static const struct ov13850_mode supported_modes[] = {
{
.width = 2112,
.height = 1568,
.max_fps = {
.numerator = 10000,
.denominator = 300000,
},
.exp_def = 0x0600,
.hts_def = 0x12c0,
.vts_def = 0x0680,
.reg_list = ov13850_2112x1568_regs,
},
#if 0
{
.width = 4224,
.height = 3136,
.max_fps = {
.numerator = 20000,
.denominator = 150000,
},
.exp_def = 0x0600,
.hts_def = 0x12c0,
.vts_def = 0x0d00,
.reg_list = ov13850_4224x3136_regs,
},
#endif
};
参考资料:
OV5645的抓图指令:
v4l2-ctl -d /dev/video64 \
--set-fmt-video=width=640,height=480,pixelformat=NV12 \
--stream-mmap=3 \
--stream-skip=3 \
--stream-to=/tmp/nv12_2.bmp \
--stream-count=1 \
--stream-poll
百度:RK3588 EXTIO_GPIO_P01 dtsi:79.30-31 syntax error
pca953x 2-0023: interrupt support not compiled in
TCA6524 EXTIO_GPIO_P01
L6524 芯片
obj-y += ov5645.o
https://blog.csdn.net/qq_41544116/article/details/131863063
rk3588 编译 linux uboot(使用github公版源码、debian rootfs)和烧录(sd、emmc)
配置文件和设备树
使用板卡厂商提供的设备树,这里用的是飞凌的 ok3588c
FET3588-C.dtsi、OK3588-C-Camera.dtsi、OK3588-C-common.dtsi、OK3588-C-Linux.dts 放到 arch/arm64/boot/dts/rockchip 里
电源管理芯片的设备树有单双之分,不能通用。单:rk3588-rk806-single.dtsi;双:rk3588-rk806-dual.dtsi
修改
OK3588-C-Camera.dtsi
EXTIO_GPIO_P06 改为 RK_PA6
EXTIO_GPIO_P07 改为 RK_PA7
EXTIO_GPIO_P10 改为 RK_PB0
EXTIO_GPIO_P11 改为 RK_PB1
EXTIO_GPIO_P05 改为 RK_PA5
EXTIO_GPIO_P04 改为 RK_PA4
EXTIO_GPIO_P01 改为 RK_PA1
EXTIO_GPIO_P00 改为 RK_PA0
EXTIO_GPIO_P03 改为 RK_PA3
EXTIO_GPIO_P02 改为 RK_PA2
从板卡厂商整合包里的 kernel/include/dt-bindings/pinctrl/rockchip.h 得出。这是 TCA6424ARGJR 芯片,用于 i2c 扩展 io,比如 EXTIO_GPIO_P06 是扩展出的 io 的序号,用这个需要修改 rockchip.h 文件,这里用已有 RK_PA6 代替序号,RK_PA6 也是序号
OK3588-C-common.dtsi
dsi0_in_vp2 和紧贴该节点上面的 dsi0
两个节点里的 status 都赋值为 okay // 这样 dsi0 的 mipi 屏就能显示了
i2c2 里的 ft5x06_dsi0
取消注释 interrupt-parent、interrupts,注释 irq-gpio // 驱动代码不同导致的修改
i2c2 里的 gt9xx_dsi0
status 赋值为 disabled // ft5x06_dsi0 和 gt9xx_dsi0 使用同一中断脚,所以节点不能都开启,这里开启的是 ft5x06_dsi0,所以 gt9xx_dsi0 就要关闭
i2c2 里的触摸芯片对应的是 dsi0 接口,如果屏幕接 dsi1 上就用同样的方法修改 i2c5
OK3588-C-Linux.dts
如果要烧录到 sd 卡里,需要更改 bootargs,修改 / 里的 chosen 节点
bootargs 值的 root 赋值为 /dev/mmcblk0p4 // mmcblk0 是设备号,从 0 开始,p4 是分区 4,从 1 开始
/ 里的 fiq_debugger 节点
rockchip,baudrate 赋值为 1500000 // 串口波特率
arch/arm64/boot/dts/rockchip/Makefile
删除所有内容并添加 dtb-$(CONFIG_ARCH_ROCKCHIP) += OK3588-C-Linux.dtb
boot.its
fdt 节点
data = /incbin/("arch/arm64/boot/dts/rockchip/OK3588-C-Linux.dtb"); // 文件的在电脑的路径,工具会去这里找
arch = "arm64";
kernel 节点
data = /incbin/("arch/arm64/boot/Image.gz");
arch = "arm64";
compression = "gzip";
如需手动制作 .gz 镜像:cat Image | gzip -n -f -9 > Image.gz
删除 resource 节点
configurations 节点
删除 conf 里的 multi 部分
删除 conf/sign-images 里的 multi 部分
编译
export ARCH=arm64 CROSS_COMPILE=aarch64-linux-gnu- // 新的终端都要先执行一次
make rockchip_linux_defconfig rk3588_linux.config
make menuconfig // rockchip 提供的公有配置也能启动,额外的驱动比如 ft5x06 的驱动就要在这自行开启。ft5x06 的位置在 Device Drivers/Input device support/Touchscreens/EDT FocalTech FT5x06 I2C Touchscreen support
make -j16
如果编译报 ...error, forbidden warning,就在 scripts/gcc-wrapper.py 中注释掉 run_gcc() 里的 interpret_warning()
boot.itb
../u-boot/tools/mkimage -f boot.its -E -p 0x800 boot.itb
Z:\OK3588_Linux_fs\kernel\arch\arm64\boot\dts\rockchip\OK3588-C-Camera.dtsi
// SPDX-License-Identifier: (GPL-2.0+ OR MIT)
/*
* Copyright (c) 2022 Forlinx Co., Ltd.
*
* rkisp0 --> rkisp0_vir0/rkisp0_vir1/rkisp0_vir2/rkisp0_vir3
* rkisp1 --> rkisp1_vir0/rkisp1_vir1/rkisp1_vir2/rkisp1_vir3
* rkcif_mipi_lvds --> rkcif_mipi_lvds[0-4]_sditf
* mipicamera0 --> csi2_dcphy0 --> mipi0_csi2 -->rkcif_mipi_lvds --> rkcif_mipi_lvds_sditf --> rkisp0_vir0
* mipicamera1 --> csi2_dcphy1 --> mipi1_csi2 -->rkcif_mipi_lvds1 --> rkcif_mipi_lvds1_sditf --> rkisp0_vir1
* csi2_dphy0 or (csi2_dphy1?¢csi2_dphy2) dphy0
* csi2_dphy3 or (csi2_dphy4?¢csi2_dphy5) dphy1
* mipicamera2 --> csi2_dphy1 --> mipi2_csi2 -->rkcif_mipi_lvds2 -->rkcif_mipi_lvds2_sditf --> rkisp0_vir2
* mipicamera3 --> csi2_dphy2 --> mipi3_csi2 -->rkcif_mipi_lvds3 -->rkcif_mipi_lvds3_sditf --> rkisp1_vir0
* mipicamera4 --> csi2_dphy4 --> mipi4_csi2 -->rkcif_mipi_lvds4 -->rkcif_mipi_lvds4_sditf --> rkisp1_vir1
* mipicamera5 --> csi2_dphy5 --> mipi5_csi2 -->rkcif_mipi_lvds5 -->rkcif_mipi_lvds5_sditf --> rkisp1_vir2
* mipicamera6 --> rkcif_dvp ---> rkcif_dvp_sditf
*/
/ {
ext_cam_clk: external-camera-clock {
compatible = "fixed-clock";
clock-frequency = <24000000>;
clock-output-names = "CLK_CAMERA_24MHZ";
#clock-cells = <0>;
};
};
&rkcif {
status = "okay";
};
&rkcif_mmu {
status = "okay";
};
//************************************************
//*** CAM1 OV13850 Configuration description ***
//************************************************
&mipi_dcphy0 {
status = "okay";
};
&rkisp0 {
status = "okay";
};
&isp0_mmu {
status = "okay";
};
&i2c3 {
status = "okay";
clock-frequency = <400000>;
vm149c_0: vm149c@0c {
compatible = "silicon touch,vm149c";
status = "okay";
reg = <0x0c>;
rockchip,camera-module-index = <0>;
rockchip,camera-module-facing = "back";
};
cam1_ov13850: cam1_ov13850@10 {
compatible = "ovti,ov13850";
status = "okay";
reg = <0x10>;
clocks = <&ext_cam_clk>;
clock-names = "xvclk";
//pwdn-gpios = <&extio EXTIO_GPIO_P01 GPIO_ACTIVE_HIGH>;
//reset-gpios = <&extio EXTIO_GPIO_P00 GPIO_ACTIVE_HIGH>;
rockchip,camera-module-index = <0>;
rockchip,camera-module-facing = "back";
rockchip,camera-module-name = "forlinx";
rockchip,camera-module-lens-name = "default";
lens-focus = <&vm149c_0>;
port {
cam1_ov13850_out: endpoint {
remote-endpoint = <&mipi_in_0_ucam1>;
data-lanes = <1 2>;
};
};
};
};
&csi2_dcphy0 {
status = "okay";
ports {
#address-cells = <1>;
#size-cells = <0>;
port@0 {
reg = <0>;
#address-cells = <1>;
#size-cells = <0>;
mipi_in_0_ucam1: endpoint@1 {
reg = <1>;
remote-endpoint = <&cam1_ov13850_out>;
data-lanes = <1 2>;
};
};
port@1 {
reg = <1>;
#address-cells = <1>;
#size-cells = <0>;
csidcphy0_out: endpoint@0 {
reg = <0>;
remote-endpoint = <&mipi0_csi2_input>;
};
};
};
};
&mipi0_csi2 {
status = "okay";
ports {
#address-cells = <1>;
#size-cells = <0>;
port@0 {
reg = <0>;
#address-cells = <1>;
#size-cells = <0>;
mipi0_csi2_input: endpoint@1 {
reg = <1>;
remote-endpoint = <&csidcphy0_out>;
};
};
port@1 {
reg = <1>;
#address-cells = <1>;
#size-cells = <0>;
mipi0_csi2_output: endpoint@0 {
reg = <0>;
remote-endpoint = <&cif_mipi_lvds0>;
};
};
};
};
&rkcif_mipi_lvds {
status = "okay";
port {
cif_mipi_lvds0: endpoint {
remote-endpoint = <&mipi0_csi2_output>;
};
};
};
&rkcif_mipi_lvds_sditf {
status = "okay";
port {
mipi_lvds_sditf: endpoint {
remote-endpoint = <&isp0_vir0>;
};
};
};
&rkisp0_vir0 {
status = "okay";
port {
#address-cells = <1>;
#size-cells = <0>;
isp0_vir0: endpoint@0 {
reg = <0>;
remote-endpoint = <&mipi_lvds_sditf>;
};
};
};
//************************************************
//*** CAM2 OV13850 Configuration description ***
//************************************************
&mipi_dcphy1 {
status = "okay";
};
&i2c4 {
status = "okay";
clock-frequency = <400000>;
vm149c_1: vm149c@0c {
compatible = "silicon touch,vm149c";
status = "okay";
reg = <0x0c>;
rockchip,camera-module-index = <1>;
rockchip,camera-module-facing = "back";
};
cam2_ov13850: cam2_ov13850@10 {
compatible = "ovti,ov13850";
status = "okay";
reg = <0x10>;
clocks = <&ext_cam_clk>;
clock-names = "xvclk";
//pwdn-gpios = <&extio EXTIO_GPIO_P03 GPIO_ACTIVE_HIGH>;
//reset-gpios = <&extio EXTIO_GPIO_P02 GPIO_ACTIVE_HIGH>;
rockchip,camera-module-index = <1>;
rockchip,camera-module-facing = "front";
rockchip,camera-module-name = "forlinx";
rockchip,camera-module-lens-name = "default";
lens-focus = <&vm149c_1>;
port {
cam2_ov13850_out: endpoint {
remote-endpoint = <&mipi_in_1_ucam2>;
data-lanes = <1 2>;
};
};
};
};
&csi2_dcphy1 {
status = "okay";
ports {
#address-cells = <1>;
#size-cells = <0>;
port@0 {
reg = <0>;
#address-cells = <1>;
#size-cells = <0>;
mipi_in_1_ucam2: endpoint@1 {
reg = <1>;
remote-endpoint = <&cam2_ov13850_out>;
data-lanes = <1 2>;
};
};
port@1 {
reg = <1>;
#address-cells = <1>;
#size-cells = <0>;
csidcphy1_out: endpoint@0 {
reg = <0>;
remote-endpoint = <&mipi1_csi2_input>;
};
};
};
};
&mipi1_csi2 {
status = "okay";
ports {
#address-cells = <1>;
#size-cells = <0>;
port@0 {
reg = <0>;
#address-cells = <1>;
#size-cells = <0>;
mipi1_csi2_input: endpoint@1 {
reg = <1>;
remote-endpoint = <&csidcphy1_out>;
};
};
port@1 {
reg = <1>;
#address-cells = <1>;
#size-cells = <0>;
mipi1_csi2_output: endpoint@0 {
reg = <0>;
remote-endpoint = <&cif_mipi_lvds1>;
};
};
};
};
&rkcif_mipi_lvds1 {
status = "okay";
port {
cif_mipi_lvds1: endpoint {
remote-endpoint = <&mipi1_csi2_output>;
};
};
};
&rkcif_mipi_lvds1_sditf {
status = "okay";
port {
mipi_lvds1_sditf: endpoint {
remote-endpoint = <&isp0_vir1>;
};
};
};
&rkisp0_vir1 {
status = "okay";
port {
#address-cells = <1>;
#size-cells = <0>;
isp0_vir1: endpoint@0 {
reg = <0>;
remote-endpoint = <&mipi_lvds1_sditf>;
};
};
};
//************************************************
//*** CAM3 OV5645 Configuration Description ****
//************************************************
&csi2_dphy0_hw {
status = "okay";
};
&i2c7 {
status = "okay";
clock-frequency = <400000>;
cam3_ov5645: cam3_ov5645@3c {
compatible = "ovti,ov5645";
status = "okay";
reg = <0x3c>;
clocks = <&ext_cam_clk>;
clock-names = "xclk";
clock-frequency = <24000000>;
//enable-gpios = <&extio EXTIO_GPIO_P05 GPIO_ACTIVE_HIGH>;
//reset-gpios = <&extio EXTIO_GPIO_P04 GPIO_ACTIVE_LOW>;
rockchip,camera-module-index = <0>;
rockchip,camera-module-facing = "back";
rockchip,camera-module-name = "NC";
rockchip,camera-module-lens-name = "NC";
port {
cam3_ov5645_out: endpoint {
remote-endpoint = <&mipi_in_ucam3>;
data-lanes = <1 2>;
};
};
};
};
&csi2_dphy0 {
status = "okay";
ports {
#address-cells = <1>;
#size-cells = <0>;
port@0 {
reg = <0>;
#address-cells = <1>;
#size-cells = <0>;
mipi_in_ucam3: endpoint@1 {
reg = <1>;
remote-endpoint = <&cam3_ov5645_out>;
data-lanes = <1 2>;
};
};
port@1 {
reg = <1>;
#address-cells = <1>;
#size-cells = <0>;
mipi2_csi2_mipicsi0_out0: endpoint@0 {
reg = <0>;
remote-endpoint = <&mipi2_csi2_input>;
};
};
};
};
&mipi2_csi2 {
status = "okay";
ports {
#address-cells = <1>;
#size-cells = <0>;
port@0 {
reg = <0>;
#address-cells = <1>;
#size-cells = <0>;
mipi2_csi2_input: endpoint@1 {
reg = <1>;
remote-endpoint = <&mipi2_csi2_mipicsi0_out0>;
};
};
port@1 {
reg = <1>;
#address-cells = <1>;
#size-cells = <0>;
mipi2_csi2_output: endpoint@0 {
reg = <0>;
remote-endpoint = <&cif_mipi_lvds2>;
};
};
};
};
&rkcif_mipi_lvds2 {
status = "okay";
port {
cif_mipi_lvds2: endpoint {
remote-endpoint = <&mipi2_csi2_output>;
};
};
};
&rkcif_mipi_lvds2_sditf {
status = "disabled";
};
//************************************************
//*** CAM4 OV5645 Configuration Description ****
//************************************************
&csi2_dphy1_hw {
status = "okay";
};
&i2c3 {
status = "okay";
cam4_ov5645: cam4_ov5645@3c {
status = "okay";
compatible = "ovti,ov5645";
reg = <0x3c>;
clocks = <&ext_cam_clk>;
clock-names = "xclk";
clock-frequency = <24000000>;
//reset-gpios = <&extio EXTIO_GPIO_P06 GPIO_ACTIVE_LOW>;
//enable-gpios = <&extio EXTIO_GPIO_P07 GPIO_ACTIVE_HIGH>;
rockchip,camera-module-index = <1>;
rockchip,camera-module-facing = "front";
rockchip,camera-module-name = "NC";
rockchip,camera-module-lens-name = "NC";
port {
cam4_ov5645_out: endpoint {
remote-endpoint = <&mipi_in_ucam4>;
data-lanes = <1 2>;
};
};
};
};
&csi2_dphy4 {
status = "okay";
ports {
#address-cells = <1>;
#size-cells = <0>;
port@0 {
reg = <0>;
#address-cells = <1>;
#size-cells = <0>;
mipi_in_ucam4: endpoint@1 {
reg = <1>;
remote-endpoint = <&cam4_ov5645_out>;
data-lanes = <1 2>;
};
};
port@1 {
reg = <1>;
#address-cells = <1>;
#size-cells = <0>;
mipi4_csi2_csidphy1_out0: endpoint@0 {
reg = <0>;
remote-endpoint = <&mipi4_csi2_input>;
};
};
};
};
&mipi4_csi2 {
status = "okay";
ports {
#address-cells = <1>;
#size-cells = <0>;
port@0 {
reg = <0>;
#address-cells = <1>;
#size-cells = <0>;
mipi4_csi2_input: endpoint@1 {
reg = <1>;
remote-endpoint = <&mipi4_csi2_csidphy1_out0>;
};
};
port@1 {
reg = <1>;
#address-cells = <1>;
#size-cells = <0>;
mipi4_csi2_output: endpoint@0 {
reg = <0>;
remote-endpoint = <&cif_mipi_in4>;
};
};
};
};
&rkcif_mipi_lvds4 {
status = "okay";
port {
cif_mipi_in4: endpoint {
remote-endpoint = <&mipi4_csi2_output>;
};
};
};
&rkcif_mipi_lvds4_sditf {
status = "disabled";
};
//************************************************
//*** CAM5 OV5645 Configuration Description ****
//************************************************
&i2c4 {
status = "okay";
cam5_ov5645: cam5_ov5645@3c {
status = "okay";
compatible = "ovti,ov5645";
reg = <0x3c>;
clocks = <&ext_cam_clk>;
clock-names = "xclk";
clock-frequency = <24000000>;
//reset-gpios = <&extio EXTIO_GPIO_P10 GPIO_ACTIVE_LOW>;
//enable-gpios = <&extio EXTIO_GPIO_P11 GPIO_ACTIVE_HIGH>;
rockchip,camera-module-index = <2>;
rockchip,camera-module-facing = "front";
rockchip,camera-module-name = "NC";
rockchip,camera-module-lens-name = "NC";
port {
cam5_ov5645_out: endpoint {
remote-endpoint = <&mipi_in_ucam5>;
data-lanes = <1 2>;
};
};
};
};
&csi2_dphy5 {
status = "okay";
ports {
#address-cells = <1>;
#size-cells = <0>;
port@0 {
reg = <0>;
#address-cells = <1>;
#size-cells = <0>;
mipi_in_ucam5: endpoint@1 {
reg = <1>;
remote-endpoint = <&cam5_ov5645_out>;
data-lanes = <1 2>;
};
};
port@1 {
reg = <1>;
#address-cells = <1>;
#size-cells = <0>;
mipi5_csi2_csidphy1_out1: endpoint@0 {
reg = <0>;
remote-endpoint = <&mipi5_csi2_input>;
};
};
};
};
&mipi5_csi2 {
status = "okay";
ports {
#address-cells = <1>;
#size-cells = <0>;
port@0 {
reg = <0>;
#address-cells = <1>;
#size-cells = <0>;
mipi5_csi2_input: endpoint@1 {
reg = <1>;
remote-endpoint = <&mipi5_csi2_csidphy1_out1>;
};
};
port@1 {
reg = <1>;
#address-cells = <1>;
#size-cells = <0>;
mipi5_csi2_output: endpoint@0 {
reg = <0>;
remote-endpoint = <&cif_mipi_in5>;
};
};
};
};
&rkcif_mipi_lvds5 {
status = "okay";
port {
cif_mipi_in5: endpoint {
remote-endpoint = <&mipi5_csi2_output>;
};
};
};
&rkcif_mipi_lvds5_sditf {
status = "disabled";
};
Z:\RK3588_IPC_SDK\sysdrv\source\kernel\arch\arm64\boot\dts\rockchip\rk3588-nvr-demo-v10-cam-4x.dtsi
// SPDX-License-Identifier: (GPL-2.0+ OR MIT)
/*
* Copyright (c) 2021 Rockchip Electronics Co., Ltd.
*
*/
/ {
vcc_mipicsi0: vcc-mipicsi0-regulator {
compatible = "regulator-fixed";
gpio = <&gpio1 RK_PB1 GPIO_ACTIVE_HIGH>;
pinctrl-names = "default";
pinctrl-0 = <&mipicsi0_pwr>;
regulator-name = "vcc_mipicsi0";
enable-active-high;
};
vcc_mipicsi1: vcc-mipicsi1-regulator {
compatible = "regulator-fixed";
gpio = <&gpio1 RK_PB2 GPIO_ACTIVE_HIGH>;
pinctrl-names = "default";
pinctrl-0 = <&mipicsi1_pwr>;
regulator-name = "vcc_mipicsi1";
enable-active-high;
};
};
&pinctrl {
cam {
mipicsi0_pwr: mipicsi0-pwr {
rockchip,pins =
<1 RK_PB1 RK_FUNC_GPIO &pcfg_pull_none>;
};
mipicsi1_pwr: mipicsi1-pwr {
rockchip,pins =
<1 RK_PB2 RK_FUNC_GPIO &pcfg_pull_none>;
};
};
};
&csi2_dphy0_hw {
status = "okay";
};
&csi2_dphy1_hw {
status = "okay";
};
&csi2_dphy1 {
status = "okay";
ports {
#address-cells = <1>;
#size-cells = <0>;
port@0 {
reg = <0>;
#address-cells = <1>;
#size-cells = <0>;
mipi_in_ucam2: endpoint@1 {
reg = <1>;
remote-endpoint = <&imx464_out2>;
data-lanes = <1 2>;
};
};
port@1 {
reg = <1>;
#address-cells = <1>;
#size-cells = <0>;
csidphy1_out: endpoint@0 {
reg = <0>;
remote-endpoint = <&mipi2_csi2_input>;
};
};
};
};
&csi2_dphy2 {
status = "okay";
ports {
#address-cells = <1>;
#size-cells = <0>;
port@0 {
reg = <0>;
#address-cells = <1>;
#size-cells = <0>;
mipi_in_ucam3: endpoint@1 {
reg = <1>;
remote-endpoint = <&imx464_out3>;
data-lanes = <1 2>;
};
};
port@1 {
reg = <1>;
#address-cells = <1>;
#size-cells = <0>;
csidphy2_out: endpoint@0 {
reg = <0>;
remote-endpoint = <&mipi3_csi2_input>;
};
};
};
};
&csi2_dphy4 {
status = "okay";
ports {
#address-cells = <1>;
#size-cells = <0>;
port@0 {
reg = <0>;
#address-cells = <1>;
#size-cells = <0>;
mipi_in_ucam4: endpoint@1 {
reg = <1>;
remote-endpoint = <&imx464_out4>;
data-lanes = <1 2>;
};
};
port@1 {
reg = <1>;
#address-cells = <1>;
#size-cells = <0>;
csidphy4_out: endpoint@0 {
reg = <0>;
remote-endpoint = <&mipi4_csi2_input>;
};
};
};
};
&csi2_dphy5 {
status = "okay";
ports {
#address-cells = <1>;
#size-cells = <0>;
port@0 {
reg = <0>;
#address-cells = <1>;
#size-cells = <0>;
mipi_in_ucam5: endpoint@1 {
reg = <1>;
remote-endpoint = <&imx464_out5>;
data-lanes = <1 2>;
};
};
port@1 {
reg = <1>;
#address-cells = <1>;
#size-cells = <0>;
csidphy5_out: endpoint@0 {
reg = <0>;
remote-endpoint = <&mipi5_csi2_input>;
};
};
};
};
&i2c5 {
status = "okay";
pinctrl-0 = <&i2c5m3_xfer>;
/* module 77/79 0x1a 78/80 0x36 */
imx464_2: imx464-2@1a {
compatible = "sony,imx464";
status = "okay";
reg = <0x1a>;
clocks = <&cru CLK_MIPI_CAMARAOUT_M3>;
clock-names = "xvclk";
power-domains = <&power RK3588_PD_VI>;
pinctrl-names = "default";
pinctrl-0 = <&mipim0_camera3_clk>;
avdd-supply = <&vcc_mipicsi0>;
reset-gpios = <&gpio1 RK_PA4 GPIO_ACTIVE_HIGH>;
pwdn-gpios = <&gpio1 RK_PB3 GPIO_ACTIVE_HIGH>;
rockchip,camera-module-sync-mode = "internal_master";
rockchip,camera-module-index = <2>;
rockchip,camera-module-facing = "back";
rockchip,camera-module-name = "CMK-OT1980-PX1";
rockchip,camera-module-lens-name = "SHG102";
port {
imx464_out2: endpoint {
remote-endpoint = <&mipi_in_ucam2>;
data-lanes = <1 2>;
};
};
};
imx464_3: imx464-3@36 {
compatible = "sony,imx464";
status = "okay";
reg = <0x36>;
clocks = <&cru CLK_MIPI_CAMARAOUT_M3>;
clock-names = "xvclk";
power-domains = <&power RK3588_PD_VI>;
avdd-supply = <&vcc_mipicsi0>;
pwdn-gpios = <&gpio1 RK_PA7 GPIO_ACTIVE_HIGH>;
rockchip,camera-module-sync-mode = "external_master";
rockchip,camera-module-index = <3>;
rockchip,camera-module-facing = "back";
rockchip,camera-module-name = "CMK-OT1980-PX1";
rockchip,camera-module-lens-name = "SHG102";
port {
imx464_out3: endpoint {
remote-endpoint = <&mipi_in_ucam3>;
data-lanes = <1 2>;
};
};
};
};
&i2c4 {
status = "okay";
pinctrl-0 = <&i2c4m3_xfer>;
/* 77/79 0x1a 78/80 0x36 */
imx464_4: imx464-4@1a {
compatible = "sony,imx464";
status = "okay";
reg = <0x1a>;
clocks = <&cru CLK_MIPI_CAMARAOUT_M4>;
clock-names = "xvclk";
power-domains = <&power RK3588_PD_VI>;
pinctrl-names = "default";
pinctrl-0 = <&mipim0_camera4_clk>;
avdd-supply = <&vcc_mipicsi1>;
reset-gpios = <&gpio1 RK_PB5 GPIO_ACTIVE_HIGH>;
pwdn-gpios = <&gpio1 RK_PB4 GPIO_ACTIVE_HIGH>;
rockchip,camera-module-sync-mode = "external_master";
rockchip,camera-module-index = <0>;
rockchip,camera-module-facing = "back";
rockchip,camera-module-name = "CMK-OT1980-PX1";
rockchip,camera-module-lens-name = "SHG102";
port {
imx464_out4: endpoint {
remote-endpoint = <&mipi_in_ucam4>;
data-lanes = <1 2>;
};
};
};
imx464_5: imx464-5@36 {
compatible = "sony,imx464";
status = "okay";
reg = <0x36>;
clocks = <&cru CLK_MIPI_CAMARAOUT_M4>;
clock-names = "xvclk";
power-domains = <&power RK3588_PD_VI>;
avdd-supply = <&vcc_mipicsi1>;
pwdn-gpios = <&gpio1 RK_PB0 GPIO_ACTIVE_HIGH>;
rockchip,camera-module-sync-mode = "external_master";
rockchip,camera-module-index = <1>;
rockchip,camera-module-facing = "back";
rockchip,camera-module-name = "CMK-OT1980-PX1";
rockchip,camera-module-lens-name = "SHG102";
port {
imx464_out5: endpoint {
remote-endpoint = <&mipi_in_ucam5>;
data-lanes = <1 2>;
};
};
};
};
&mipi2_csi2 {
status = "okay";
ports {
#address-cells = <1>;
#size-cells = <0>;
port@0 {
reg = <0>;
#address-cells = <1>;
#size-cells = <0>;
mipi2_csi2_input: endpoint@1 {
reg = <1>;
remote-endpoint = <&csidphy1_out>;
};
};
port@1 {
reg = <1>;
#address-cells = <1>;
#size-cells = <0>;
mipi2_csi2_output: endpoint@0 {
reg = <0>;
remote-endpoint = <&cif_mipi_in2>;
};
};
};
};
&mipi3_csi2 {
status = "okay";
ports {
#address-cells = <1>;
#size-cells = <0>;
port@0 {
reg = <0>;
#address-cells = <1>;
#size-cells = <0>;
mipi3_csi2_input: endpoint@1 {
reg = <1>;
remote-endpoint = <&csidphy2_out>;
};
};
port@1 {
reg = <1>;
#address-cells = <1>;
#size-cells = <0>;
mipi3_csi2_output: endpoint@0 {
reg = <0>;
remote-endpoint = <&cif_mipi_in3>;
};
};
};
};
&mipi4_csi2 {
status = "okay";
ports {
#address-cells = <1>;
#size-cells = <0>;
port@0 {
reg = <0>;
#address-cells = <1>;
#size-cells = <0>;
mipi4_csi2_input: endpoint@1 {
reg = <1>;
remote-endpoint = <&csidphy4_out>;
};
};
port@1 {
reg = <1>;
#address-cells = <1>;
#size-cells = <0>;
mipi4_csi2_output: endpoint@0 {
reg = <0>;
remote-endpoint = <&cif_mipi_in4>;
};
};
};
};
&mipi5_csi2 {
status = "okay";
ports {
#address-cells = <1>;
#size-cells = <0>;
port@0 {
reg = <0>;
#address-cells = <1>;
#size-cells = <0>;
mipi5_csi2_input: endpoint@1 {
reg = <1>;
remote-endpoint = <&csidphy5_out>;
};
};
port@1 {
reg = <1>;
#address-cells = <1>;
#size-cells = <0>;
mipi5_csi2_output: endpoint@0 {
reg = <0>;
remote-endpoint = <&cif_mipi_in5>;
};
};
};
};
&rkcif {
status = "okay";
};
&rkcif_mipi_lvds2 {
status = "okay";
port {
cif_mipi_in2: endpoint {
remote-endpoint = <&mipi2_csi2_output>;
};
};
};
&rkcif_mipi_lvds2_sditf {
status = "okay";
port {
mipi2_lvds_sditf: endpoint {
remote-endpoint = <&isp0_vir0>;
};
};
};
&rkcif_mipi_lvds3 {
status = "okay";
port {
cif_mipi_in3: endpoint {
remote-endpoint = <&mipi3_csi2_output>;
};
};
};
&rkcif_mipi_lvds3_sditf {
status = "okay";
port {
mipi3_lvds_sditf: endpoint {
remote-endpoint = <&isp1_vir0>;
};
};
};
&rkcif_mipi_lvds4 {
status = "okay";
port {
cif_mipi_in4: endpoint {
remote-endpoint = <&mipi4_csi2_output>;
};
};
};
&rkcif_mipi_lvds4_sditf {
status = "okay";
port {
mipi4_lvds_sditf: endpoint {
remote-endpoint = <&isp0_vir1>;
};
};
};
&rkcif_mipi_lvds5 {
status = "okay";
port {
cif_mipi_in5: endpoint {
remote-endpoint = <&mipi5_csi2_output>;
};
};
};
&rkcif_mipi_lvds5_sditf {
status = "okay";
port {
mipi5_lvds_sditf: endpoint {
remote-endpoint = <&isp1_vir1>;
};
};
};
&rkcif_mmu {
status = "okay";
};
&rkisp0 {
status = "okay";
};
&isp0_mmu {
status = "okay";
};
&rkisp0_vir0 {
status = "okay";
port {
#address-cells = <1>;
#size-cells = <0>;
isp0_vir0: endpoint@0 {
reg = <0>;
remote-endpoint = <&mipi2_lvds_sditf>;
};
};
};
&rkisp0_vir1 {
status = "okay";
port {
#address-cells = <1>;
#size-cells = <0>;
isp0_vir1: endpoint@0 {
reg = <0>;
remote-endpoint = <&mipi4_lvds_sditf>;
};
};
};
&rkisp1 {
status = "okay";
};
&isp1_mmu {
status = "okay";
};
&rkisp1_vir0 {
status = "okay";
port {
#address-cells = <1>;
#size-cells = <0>;
isp1_vir0: endpoint@0 {
reg = <0>;
remote-endpoint = <&mipi3_lvds_sditf>;
};
};
};
&rkisp1_vir1 {
status = "okay";
port {
#address-cells = <1>;
#size-cells = <0>;
isp1_vir1: endpoint@0 {
reg = <0>;
remote-endpoint = <&mipi5_lvds_sditf>;
};
};
};















 1185
1185











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









