







 本文详细记录了在rk3588平台上进行摄像头驱动bringup的过程,包括准备工作、代码修改、调试步骤,涉及dts配置、i2c通信、CIF绑定、AF调试等关键环节,最终实现摄像头的正常预览和拍照功能。
本文详细记录了在rk3588平台上进行摄像头驱动bringup的过程,包括准备工作、代码修改、调试步骤,涉及dts配置、i2c通信、CIF绑定、AF调试等关键环节,最终实现摄像头的正常预览和拍照功能。
最近几天在rk3588平台上调试点亮camera,记录下调试过程
1. 准备工作
首先获取相关camera ov13855的模组打样规格书,ov13855 datasheet,板子硬件原理图以及对应的layout,检查pin脚定义、pin脚顺序,确定电源IOVDD、DVDD、AVDD以及AF电源,确定几路mipi,确定相关AF型号、AF i2c地址以及获取相关IC datasheet,如果有需要,还要确定模组成像方向
另外可能需要确定焦距、光圈、视场角、景深,如果AF支持pdaf,还需要获取shield pixel的坐标点,这都是后话,看具体需求
2. bringup 工作
2.1 代码准备工作
原则上应该是bringup前找camera原厂获取camera的initial,preview,video、capture等场景下的寄存器配置,如下信息需要check
上面的要求是之前展讯平台内部确认camera的表单,如果是在方案公司,这些就不是那么重要了,许多确认步骤都不会进行,比如DVT测试。
我们进入正题,在rockchip 3588上bringup,这里我们使用的是默认的驱动参数,tuning参数也是默认的,rk3588平台驱动是使用的时v4l2+ media entity架构,我们只需要注册ov13855 subdev,像mipi phy、csi 、isp等节点只需要打开相应的dts节点,平台已经注册好,不需要做过多的改动
2.2 camera bringup debug过程
2.2.1 dts配置及驱动代码修改
dts设置可参考平台已有的,如下时我配置的
// SPDX-License-Identifier: (GPL-2.0+ OR MIT)
/*
* Copyright (c) 2022 Rockchip Electronics Co., Ltd.
*
*/
/ {
cam_ircut0: cam_ircut {
status = "okay";
compatible = "rockchip,ircut";
ircut-open-gpios = <&gpio4 RK_PA0 GPIO_ACTIVE_HIGH>;
ircut-close-gpios = <&gpio4 RK_PA1 GPIO_ACTIVE_HIGH>;
rockchip,camera-module-index = <0>;
rockchip,camera-module-facing = "back";
};
};
&csi2_dcphy0 {
status = "okay";
ports {
#address-cells = <1>;
#size-cells = <0>;
port@0 {
reg = <0>;
#address-cells = <1>;
#size-cells = <0>;
mipidphy0_in_ucam0: endpoint@1 {
reg = <1>;
remote-endpoint = <&ov13855_out0>;
data-lanes = <1 2 3 4>;
};
};
port@1 {
reg = <1>;
#address-cells = <1>;
#size-cells = <0>;
csidcphy0_out: endpoint@0 {
reg = <0>;
remote-endpoint = <&mipi0_csi2_input>;
};
};
};
};
&csi2_dphy0_hw {
status = "okay";
};
&i2c4 {
status = "okay";
pinctrl-0 = <&i2c4m0_xfer>;
dw9763: dw9763@c {
compatible = "dongwoon,dw9763";
status = "okay";
reg = <0xc>;
rockchip,camera-module-index = <0>;
rockchip,vcm-start-current = <10>;
rockchip,vcm-rated-current = <85>;
//rockchip,vcm-step-mode = <5>;
rockchip,camera-module-facing = "back";
vdd-gpio = <&aw_gpio1 0 GPIO_ACTIVE_HIGH>;
};
ov13855: ov13855@10 {
compatible = "ovti,ov13855";
status = "okay";
reg = <0x10>;
clocks = <&cru CLK_MIPI_CAMARAOUT_M1>;
clock-names = "xvclk";
pinctrl-names = "default";
pinctrl-0 = <&mipim0_camera1_clk>;
power-domains = <&power RK3588_PD_VI>;
reset-gpios = <&gpio1 RK_PB0 GPIO_ACTIVE_HIGH>;
pwdn-gpios = <&gpio1 RK_PA4 GPIO_ACTIVE_HIGH>;
//lf-gpios = <&aw_gpio1 0 GPIO_ACTIVE_HIGH>;
//iovdd-gpios = <&aw_gpio1 1 GPIO_ACTIVE_HIGH>;
vaf-gpios = <&aw_gpio1 2 GPIO_ACTIVE_HIGH>;
avdd-gpios = <&aw_gpio1 3 GPIO_ACTIVE_HIGH>;
dvdd-gpios = <&aw_gpio1 4 GPIO_ACTIVE_HIGH>;
rockchip,camera-module-index = <0>;
rockchip,camera-module-facing = "back";
rockchip,camera-module-name = "CMK-OT2016-FV1";
rockchip,camera-module-lens-name = "default";
lens-focus = <&dw9763>;
port {
ov13855_out0: endpoint {
remote-endpoint = <&mipidphy0_in_ucam0>;
data-lanes = <1 2 3 4>;
};
};
};
};
&mipi0_csi2 {
status = "okay";
ports {
#address-cells = <1>;
#size-cells = <0>;
port@0 {
reg = <0>;
#address-cells = <1>;
#size-cells = <0>;
mipi0_csi2_input: endpoint@1 {
reg = <1>;
remote-endpoint = <&csidcphy0_out>;
};
};
port@1 {
reg = <1>;
#address-cells = <1>;
#size-cells = <0>;
mipi0_csi2_output: endpoint@0 {
reg = <0>;
remote-endpoint = <&cif_mipi_in0>;
};
};
};
};
&pinctrl {
cam {
/*
mipidphy0_pwr: mipidphy0-pwr {
rockchip,pins =
<1 RK_PB2 RK_FUNC_GPIO &pcfg_pull_none>;
};
*/
};
};
&rkcif {
status = "okay";
};
&rkcif_mipi_lvds {
status = "okay";
port {
cif_mipi_in0: endpoint {
remote-endpoint = <&mipi0_csi2_output>;
};
};
};
&rkcif_mipi_lvds_sditf {
status = "okay";
port {
mipi_lvds_sditf: endpoint {
remote-endpoint = <&isp0_vir0>;
};
};
};
&rkcif_mmu {
status = "okay";
};
&rkisp0 {
status = "okay";
};
&isp0_mmu {
status = "okay";
};
&rkisp0_vir0 {
status = "okay";
port {
#address-cells = <1>;
#size-cells = <0>;
isp0_vir0: endpoint@0 {
reg = <0>;
remote-endpoint = <&mipi_lvds_sditf>;
};
};
};
这里我使用的如下的通路,

后摄配置为第一条通路,前摄配置为第二条通路
如此配置dts,修改ov13855.c中注册时的上电方式,按照datasheet中power on sequence和power down sequence配置上下电时序
注意上下电时序一定要符合datasheet,同时注意reset和powerdown两个引脚的有效电平和时序
2.2.2 调试过程1
这一步主要是确定sensor i2c是否通信正常,CIF和sensor是否已经绑定
在开机过程中会进行ov13855 chip id的读取,以及subdev的注册
2.2.2.1 i2c通讯
不了解i2c协议的去看《i2c总线协议.pdf》,这里不再赘述
log中出现i2c读取错误的或者读取到全是0的(可能powerdown或reset的原因)需要量以下信号,Power(包括AVDD/DVDD/IOVDD)/PowerDown/Reset/Mclk/I2c clk和data
此处camera i2c不通的可能原因(这里是i2c host正常的前提下):
- camera power 和datasheet 的供电要求不一致
- PowerDown电平与有效电平不一致,另外也可能PowerDown电平和实际配置的GPIO输出电压不一致,可以查看对应GPIO是否别其他模块占用,是否设置为GPIO模式,检查硬件电路是否有电阻虚焊或漏焊
- RESET 同 上面的PowerDown
- Mclk异常,正常参考频率为24M,可能引脚复用没有配置正确,可通过cat /sys/kernel/debug/pinctrl/pinctrl/pinmux-pins 查看,IO电源域未供电,IO电源域与软件IO-domain不匹配
- ov13855节点是否配置正确,i2c地址是否正确,检查i2c供电是否正常,在无信号的情况下是否处于高电平,i2c 波形是否正常
我这边遇到的问题是i2c gpio被其他器件占用,导致注册时报错,板卡上摄像头公座 贴反导致i2c 读出值为0
2.2.2.2 CIF和sensor绑定
这块涉及到V4L2架构,具体的v4l2架构的注册和 media entity可参考如下文章:
如何判断 camera 驱动是否加载成功
当所有的 camera 都注册完毕, kernel 会打印出如下的 log。
localhost ~ # dmesg | grep Async
[ 0.682982] rkisp: Async subdev notifier completed
如发现 kernel 没有 Async subdev notifier completed 这行 log,那么请首先查看 sensor是否有相关的报错, I2C 通讯是否成功。
RKISP 驱动如果加载成功,会有 video 及 media 设备存在于/dev/目录下。系统中可能存在
多个/dev/video 设备,通过/sys 可以查询到 RKISP 注册的 video 节点
rk3588_s:/ # grep -H '' /sys/class/video4linux/video*/name
/sys/class/video4linux/video0/name:stream_cif_mipi_id0
/sys/class/video4linux/video1/name:stream_cif_mipi_id1
/sys/class/video4linux/video10/name:rkcif_tools_id2
/sys/class/video4linux/video11/name:stream_cif_mipi_id0
/sys/class/video4linux/video12/name:stream_cif_mipi_id1
/sys/class/video4linux/video13/name:stream_cif_mipi_id2
/sys/class/video4linux/video14/name:stream_cif_mipi_id3
/sys/class/video4linux/video15/name:rkcif_scale_ch0
/sys/class/video4linux/video16/name:rkcif_scale_ch1
/sys/class/video4linux/video17/name:rkcif_scale_ch2
/sys/class/video4linux/video18/name:rkcif_scale_ch3
/sys/class/video4linux/video19/name:rkcif_tools_id0
/sys/class/video4linux/video2/name:stream_cif_mipi_id2
/sys/class/video4linux/video20/name:rkcif_tools_id1
/sys/class/video4linux/video21/name:rkcif_tools_id2
/sys/class/video4linux/video22/name:rkisp_mainpath
/sys/class/video4linux/video23/name:rkisp_selfpath
/sys/class/video4linux/video24/name:rkisp_fbcpath
/sys/class/video4linux/video25/name:rkisp_iqtool
/sys/class/video4linux/video26/name:rkisp_rawrd0_m
/sys/class/video4linux/video27/name:rkisp_rawrd2_s
/sys/class/video4linux/video28/name:rkisp_rawrd1_l
/sys/class/video4linux/video29/name:rkisp-statistics
/sys/class/video4linux/video3/name:stream_cif_mipi_id3
/sys/class/video4linux/video30/name:rkisp-input-params
/sys/class/video4linux/video31/name:rkisp_mainpath
/sys/class/video4linux/video32/name:rkisp_selfpath
/sys/class/video4linux/video33/name:rkisp_fbcpath
/sys/class/video4linux/video34/name:rkisp_iqtool
/sys/class/video4linux/video35/name:rkisp_rawrd0_m
/sys/class/video4linux/video36/name:rkisp_rawrd2_s
/sys/class/video4linux/video37/name:rkisp_rawrd1_l
/sys/class/video4linux/video38/name:rkisp-statistics
/sys/class/video4linux/video39/name:rkisp-input-params
/sys/class/video4linux/video4/name:rkcif_scale_ch0
/sys/class/video4linux/video40/name:stream_hdmirx
/sys/class/video4linux/video5/name:rkcif_scale_ch1
/sys/class/video4linux/video6/name:rkcif_scale_ch2
/sys/class/video4linux/video7/name:rkcif_scale_ch3
/sys/class/video4linux/video8/name:rkcif_tools_id0
/sys/class/video4linux/video9/name:rkcif_tools_id1
2.2.2 调试过程2
rk3588有两个csi_dcphy,两个csi_dphy,我第一次配置的时使用csi_dphy0,但调试到后面v4l2-ctl不能抓取数据,后面换成csi_dcphy0才正常抓图,具体的过程如下
- 检查确定CONFIG_VIDEO_ROCKCHIP_CIF必须要配置
- 检查meida拓扑
/dev/media0 拓扑如下 media-ctl -p Opening media device /dev/media0 Enumerating entities Found 11 entities Enumerating pads and links Media controller API version 0.0.66 Media device information ------------------------ driver rkcif model rkcif-mipi-lvds2 serial bus info hw revision 0x0 driver version 0.0.66 Device topology - entity 1: stream_cif_mipi_id0 (1 pad, 8 links) type Node subtype V4L device node name /dev/video0 pad0: Sink <- "rockchip-mipi-csi2":1 [ENABLED] <- "rockchip-mipi-csi2":2 [] <- "rockchip-mipi-csi2":3 [] <- "rockchip-mipi-csi2":4 [] <- "rockchip-mipi-csi2":5 [] <- "rockchip-mipi-csi2":6 [] <- "rockchip-mipi-csi2":7 [] <- "rockchip-mipi-csi2":8 [] - entity 5: stream_cif_mipi_id1 (1 pad, 8 links) type Node subtype V4L device node name /dev/video1 pad0: Sink <- "rockchip-mipi-csi2":1 [] <- "rockchip-mipi-csi2":2 [ENABLED] <- "rockchip-mipi-csi2":3 [] <- "rockchip-mipi-csi2":4 [] <- "rockchip-mipi-csi2":5 [] <- "rockchip-mipi-csi2":6 [] <- "rockchip-mipi-csi2":7 [] <- "rockchip-mipi-csi2":8 [] - entity 9: stream_cif_mipi_id2 (1 pad, 8 links) type Node subtype V4L device node name /dev/video2 pad0: Sink <- "rockchip-mipi-csi2":1 [] <- "rockchip-mipi-csi2":2 [] <- "rockchip-mipi-csi2":3 [ENABLED] <- "rockchip-mipi-csi2":4 [] <- "rockchip-mipi-csi2":5 [] <- "rockchip-mipi-csi2":6 [] <- "rockchip-mipi-csi2":7 [] <- "rockchip-mipi-csi2":8 [] - entity 13: stream_cif_mipi_id3 (1 pad, 8 links) type Node subtype V4L device node name /dev/video3 pad0: Sink <- "rockchip-mipi-csi2":1 [] <- "rockchip-mipi-csi2":2 [] <- "rockchip-mipi-csi2":3 [] <- "rockchip-mipi-csi2":4 [ENABLED] <- "rockchip-mipi-csi2":5 [] <- "rockchip-mipi-csi2":6 [] <- "rockchip-mipi-csi2":7 [] <- "rockchip-mipi-csi2":8 [] - entity 17: rkcif_scale_ch0 (1 pad, 8 links) type Node subtype V4L device node name /dev/video4 pad0: Sink <- "rockchip-mipi-csi2":1 [] <- "rockchip-mipi-csi2":2 [] <- "rockchip-mipi-csi2":3 [] <- "rockchip-mipi-csi2":4 [] <- "rockchip-mipi-csi2":5 [ENABLED] <- "rockchip-mipi-csi2":6 [] <- "rockchip-mipi-csi2":7 [] <- "rockchip-mipi-csi2":8 [] - entity 21: rkcif_scale_ch1 (1 pad, 8 links) type Node subtype V4L device node name /dev/video5 pad0: Sink <- "rockchip-mipi-csi2":1 [] <- "rockchip-mipi-csi2":2 [] <- "rockchip-mipi-csi2":3 [] <- "rockchip-mipi-csi2":4 [] <- "rockchip-mipi-csi2":5 [] <- "rockchip-mipi-csi2":6 [ENABLED] <- "rockchip-mipi-csi2":7 [] <- "rockchip-mipi-csi2":8 [] - entity 25: rkcif_scale_ch2 (1 pad, 8 links) type Node subtype V4L device node name /dev/video6 pad0: Sink <- "rockchip-mipi-csi2":1 [] <- "rockchip-mipi-csi2":2 [] <- "rockchip-mipi-csi2":3 [] <- "rockchip-mipi-csi2":4 [] <- "rockchip-mipi-csi2":5 [] <- "rockchip-mipi-csi2":6 [] <- "rockchip-mipi-csi2":7 [ENABLED] <- "rockchip-mipi-csi2":8 [] - entity 29: rkcif_scale_ch3 (1 pad, 8 links) type Node subtype V4L device node name /dev/video7 pad0: Sink <- "rockchip-mipi-csi2":1 [] <- "rockchip-mipi-csi2":2 [] <- "rockchip-mipi-csi2":3 [] <- "rockchip-mipi-csi2":4 [] <- "rockchip-mipi-csi2":5 [] <- "rockchip-mipi-csi2":6 [] <- "rockchip-mipi-csi2":7 [] <- "rockchip-mipi-csi2":8 [ENABLED] - entity 33: rockchip-mipi-csi2 (9 pads, 65 links) type V4L2 subdev subtype Unknown device node name /dev/v4l-subdev0 pad0: Sink [fmt:SBGGR10/4224x3136 crop.bounds:(0,0)/4224x3136 crop:(0,0)/4224x3136] <- "rockchip-csi2-dphy0":1 [ENABLED] pad1: Source -> "stream_cif_mipi_id0":0 [ENABLED] -> "stream_cif_mipi_id1":0 [] -> "stream_cif_mipi_id2":0 [] -> "stream_cif_mipi_id3":0 [] -> "rkcif_scale_ch0":0 [] -> "rkcif_scale_ch1":0 [] -> "rkcif_scale_ch2":0 [] -> "rkcif_scale_ch3":0 [] pad2: Source -> "stream_cif_mipi_id0":0 [] -> "stream_cif_mipi_id1":0 [ENABLED] -> "stream_cif_mipi_id2":0 [] -> "stream_cif_mipi_id3":0 [] -> "rkcif_scale_ch0":0 [] -> "rkcif_scale_ch1":0 [] -> "rkcif_scale_ch2":0 [] -> "rkcif_scale_ch3":0 [] pad3: Source -> "stream_cif_mipi_id0":0 [] -> "stream_cif_mipi_id1":0 [] -> "stream_cif_mipi_id2":0 [ENABLED] -> "stream_cif_mipi_id3":0 [] -> "rkcif_scale_ch0":0 [] -> "rkcif_scale_ch1":0 [] -> "rkcif_scale_ch2":0 [] -> "rkcif_scale_ch3":0 [] pad4: Source -> "stream_cif_mipi_id0":0 [] -> "stream_cif_mipi_id1":0 [] -> "stream_cif_mipi_id2":0 [] -> "stream_cif_mipi_id3":0 [ENABLED] -> "rkcif_scale_ch0":0 [] -> "rkcif_scale_ch1":0 [] -> "rkcif_scale_ch2":0 [] -> "rkcif_scale_ch3":0 [] pad5: Source -> "stream_cif_mipi_id0":0 [] -> "stream_cif_mipi_id1":0 [] -> "stream_cif_mipi_id2":0 [] -> "stream_cif_mipi_id3":0 [] -> "rkcif_scale_ch0":0 [ENABLED] -> "rkcif_scale_ch1":0 [] -> "rkcif_scale_ch2":0 [] -> "rkcif_scale_ch3":0 [] pad6: Source -> "stream_cif_mipi_id0":0 [] -> "stream_cif_mipi_id1":0 [] -> "stream_cif_mipi_id2":0 [] -> "stream_cif_mipi_id3":0 [] -> "rkcif_scale_ch0":0 [] -> "rkcif_scale_ch1":0 [ENABLED] -> "rkcif_scale_ch2":0 [] -> "rkcif_scale_ch3":0 [] pad7: Source -> "stream_cif_mipi_id0":0 [] -> "stream_cif_mipi_id1":0 [] -> "stream_cif_mipi_id2":0 [] -> "stream_cif_mipi_id3":0 [] -> "rkcif_scale_ch0":0 [] -> "rkcif_scale_ch1":0 [] -> "rkcif_scale_ch2":0 [ENABLED] -> "rkcif_scale_ch3":0 [] pad8: Source -> "stream_cif_mipi_id0":0 [] -> "stream_cif_mipi_id1":0 [] -> "stream_cif_mipi_id2":0 [] -> "stream_cif_mipi_id3":0 [] -> "rkcif_scale_ch0":0 [] -> "rkcif_scale_ch1":0 [] -> "rkcif_scale_ch2":0 [] -> "rkcif_scale_ch3":0 [ENABLED] - entity 43: rockchip-csi2-dphy0 (2 pads, 2 links) type V4L2 subdev subtype Unknown device node name /dev/v4l-subdev1 pad0: Sink [fmt:SBGGR10/4224x3136 crop.bounds:(0,0)/4224x3136] <- "m00_b_ov13855 4-0010":0 [ENABLED] pad1: Source -> "rockchip-mipi-csi2":0 [ENABLED] - entity 48: m00_b_ov13855 4-0010 (1 pad, 1 link) type V4L2 subdev subtype Sensor device node name /dev/v4l-subdev2 pad0: Source [fmt:SBGGR10/4224x3136 crop.bounds:(0,0)/4224x3136] -> "rockchip-csi2-dphy0":0 [ENABLED] /dev/media1 拓扑如下 media-ctl -p -d /dev/media1 Opening media device /dev/media1 Enumerating entities Found 11 entities Enumerating pads and links Media controller API version 0.0.66 Media device information ------------------------ driver rkisp0-vir0 model rkisp0 serial bus info hw revision 0x0 driver version 0.0.66 Device topology - entity 1: rkisp-isp-subdev (4 pads, 10 links) type V4L2 subdev subtype Unknown device node name /dev/v4l-subdev3 pad0: Sink [fmt:SBGGR10/4224x3136 crop.bounds:(0,0)/4224x3136 crop:(0,0)/4224x3136] <- "rkisp_rawrd0_m":0 [] <- "rkisp_rawrd2_s":0 [] <- "rkisp_rawrd1_l":0 [] <- "rkcif-mipi-lvds2":0 [ENABLED] pad1: Sink <- "rkisp-input-params":0 [ENABLED] pad2: Source [fmt:YUYV2X8/4224x3136 crop.bounds:(0,0)/4224x3136 crop:(0,0)/4224x3136] -> "rkisp_mainpath":0 [ENABLED] -> "rkisp_selfpath":0 [ENABLED] -> "rkisp_fbcpath":0 [ENABLED] -> "rkisp_iqtool":0 [ENABLED] pad3: Source -> "rkisp-statistics":0 [ENABLED] - entity 6: rkisp_mainpath (1 pad, 1 link) type Node subtype V4L device node name /dev/video8 pad0: Sink <- "rkisp-isp-subdev":2 [ENABLED] - entity 12: rkisp_selfpath (1 pad, 1 link) type Node subtype V4L device node name /dev/video9 pad0: Sink <- "rkisp-isp-subdev":2 [ENABLED] - entity 18: rkisp_fbcpath (1 pad, 1 link) type Node subtype V4L device node name /dev/video10 pad0: Sink <- "rkisp-isp-subdev":2 [ENABLED] - entity 24: rkisp_iqtool (1 pad, 1 link) type Node subtype V4L device node name /dev/video11 pad0: Sink <- "rkisp-isp-subdev":2 [ENABLED] - entity 30: rkisp_rawrd0_m (1 pad, 1 link) type Node subtype V4L device node name /dev/video12 pad0: Source -> "rkisp-isp-subdev":0 [] - entity 36: rkisp_rawrd2_s (1 pad, 1 link) type Node subtype V4L device node name /dev/video13 pad0: Source -> "rkisp-isp-subdev":0 [] - entity 42: rkisp_rawrd1_l (1 pad, 1 link) type Node subtype V4L device node name /dev/video14 pad0: Source -> "rkisp-isp-subdev":0 [] - entity 48: rkisp-statistics (1 pad, 1 link) type Node subtype V4L device node name /dev/video15 pad0: Sink <- "rkisp-isp-subdev":3 [ENABLED] - entity 54: rkisp-input-params (1 pad, 1 link) type Node subtype V4L device node name /dev/video16 pad0: Source -> "rkisp-isp-subdev":1 [ENABLED] - entity 60: rkcif-mipi-lvds2 (1 pad, 1 link) type V4L2 subdev subtype Unknown device node name /dev/v4l-subdev4 pad0: Source [fmt:SBGGR10/4224x3136] -> "rkisp-isp-subdev":0 [ENABLED]
可以看到media拓扑通路正常,v4l2-ctl抓图
v4l2-ctl -d /dev/video0 --set-fmt-video=width=4224,height=3136,pixelformat=BG10 --stream-mmap=3 --stream-skip=10 --stream-to=/data/cif.out
v4l2-ctl -d /dev/video8 --set-fmt-video=width=4224,height=3136,pixelformat=NV12 --stream-mmap=3 --stream-skip=3 --stream-to=/data/cif2.out --stream-count=10 --stream-poll
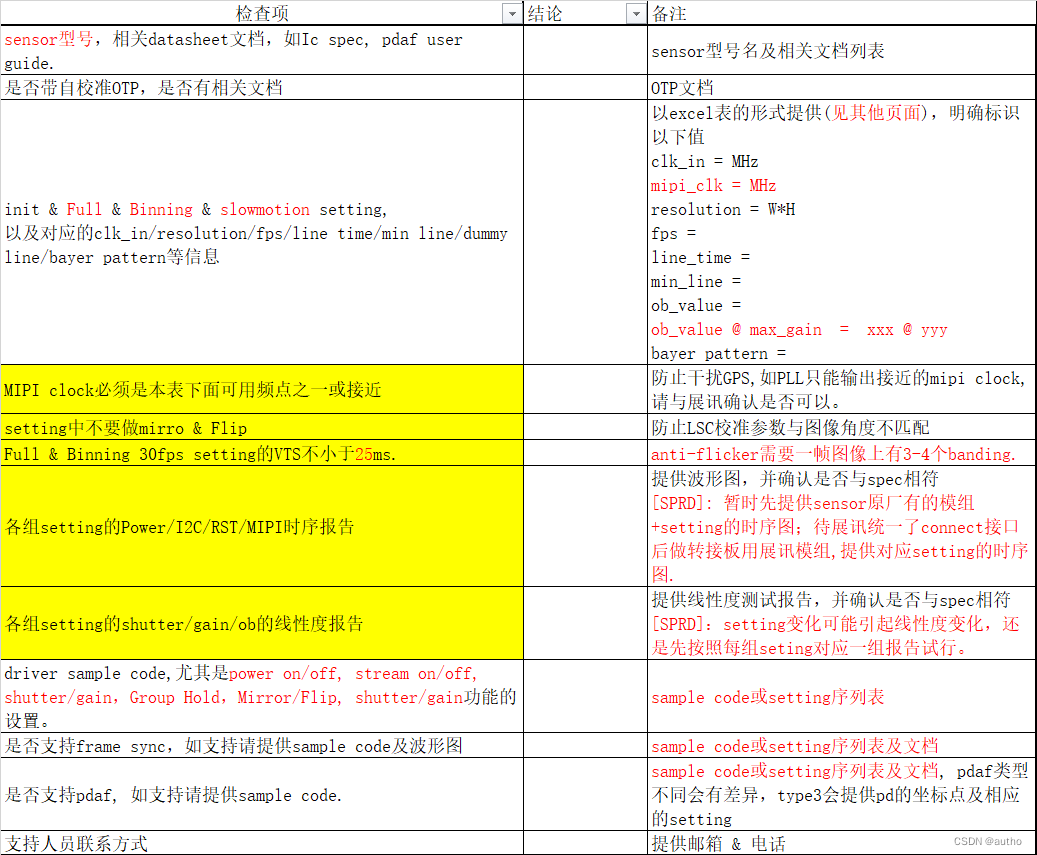
- 如果还抓图失败,则运行这条v4l2指令,然后示波器测量下mipi信号(mipi clk_p clk_n以及几个data脚)
data有数据,具体的帧率可以看到为30fps,帧间隔时间为33.4ms
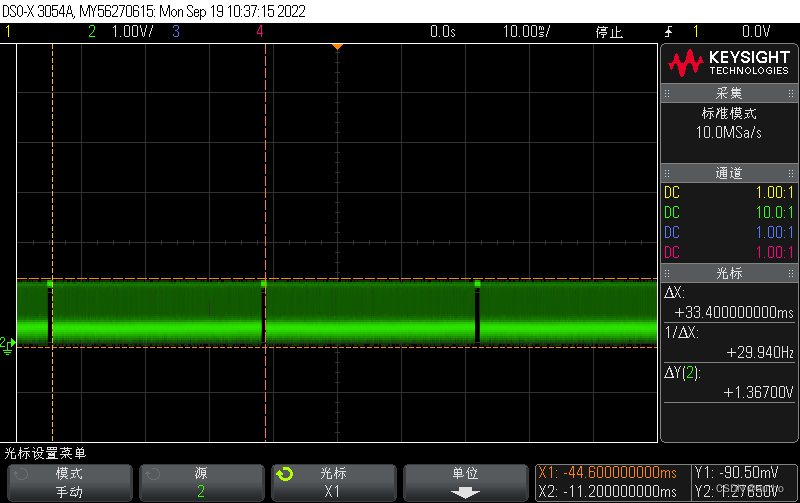
一帧数据如下图,分辨率为4224*3136,33.4ms/3136 大致在10微妙左右
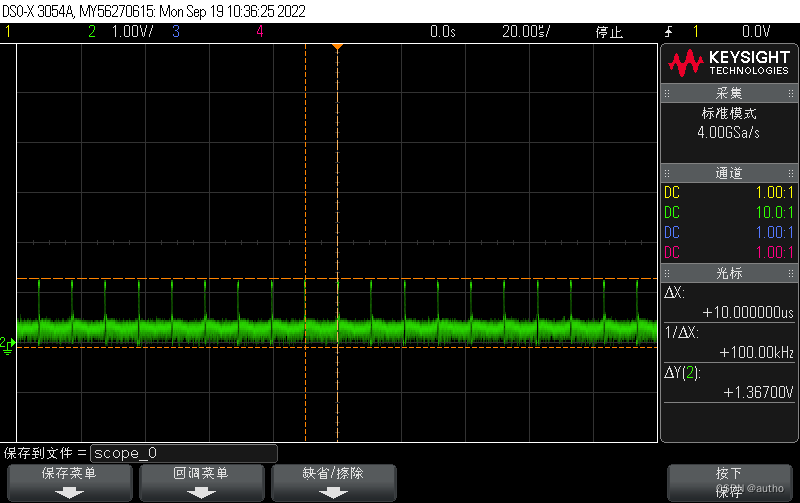
clock 如下
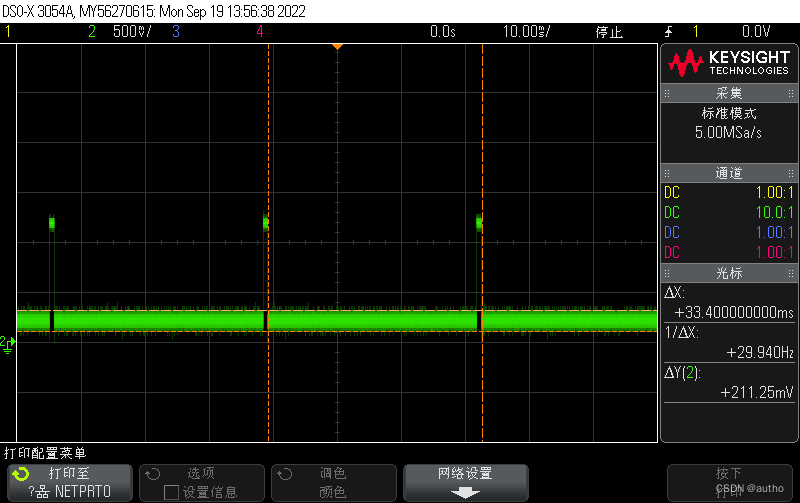
clk放大后的频率
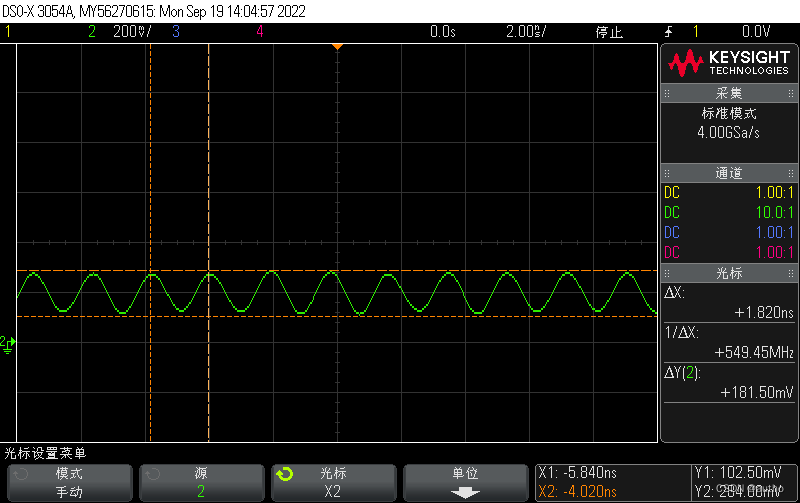
通过测量camera端的mipi型号,确定信号都正常,查看media,确定配置正确,但还是抓不到图,在rk redmine上FAE建议换dcphy0测试,如此在dcphy0上可以正常抓图,dphy0上可能某些时序配置可能不够完善,后面有需求再进行debug
以上camera ov13855驱动层已经通了
2.2.3 调试过程3
驱动层通了,之后我们通过Android界面的camera app打开camera,发现不能打开,查看hal层log可以了解到,getcamerainfo函数get到的camera为0,而get的过程中时解析camera3_profiles.xml,修改xml文件,添加ov13855,设置为后摄 cameraId=“0”,lens.facing value=“BACK”
2.2.3.1 camera3_profiles.xml && iqfiles
- 将需要更新的库或者 xm 配置文件 push 到板子相应的目录。
$ adb root && adb remount
$ adb push <hal3_camera>/etc/camera /vendor/etc/ (android version >= 8.0)
$ adb push <hal3_camera>/etc/camera /system/etc/ (android version < 8.0) - 重新启动 camera 服务进程
$ adb shell pkill camera && adb shell pkilll provider - 通过如下命令查看 camera 是否加载成功。
$ adb shell dumpsys media.camera - 如果没有打印出 camera 相关信息(camera 正常信息有好几百行),则加载失败。
此时: - 再次确认配置文件是否有 Push 到板子(普遍是这个问题,请再三确认):
$ adb shell
$ cat /vendor/camera/camera3_profiles.xml //查看该文件是否是修改过后的文件,$ adb logcat|grep “E RkCamera” 查看是否是致命错误,定位分析。 - 如果前三步都没有问题,底层驱动正常,可用 v4l2-ctl 抓到数据,此时 camera 应该可以打开了。
Camera 如果打不开, 可以打开相关 camera log 的开关来定位问题。
$ adb shell setprop persist.vendor.camera.hal.debug 5
进行到目前,我们camera app还是不能打开,发现时效果参数iqfiles文件不能找到,对比了之前的命名规则为 sensor名+module名+lens name
与dts中的设置对应
rockchip,camera-module-name = “CMK-OT2016-FV1”;
rockchip,camera-module-lens-name = “default”;
所以暂时设置iqfiles为ov13855_CMK-OT2016-FV1_default.json
设置完成后camera app依旧不能打开,log显示在dqbuffer时出现kernel panic,由于rockchip 3588没有sysdump文件也没有log子系统(反正我是没找到),所以kernel panic问题拖了很久,在FAE的建议下升级SDK到ANDROID12_RKR10后问题解决,对比两个SDK版本的iqfiles,一模一样,只能是isp代码更新解决了问题
自此camera app可以预览了
2.3 AF 调试
打开camera app后预览拍照正常,af无法对焦,AF IC为DW9763,平台没有兼容代码,仿照dw9800改写出了dw9763代码,如下
// SPDX-License-Identifier: GPL-2.0
/*
* dw9763 vcm driver
*
* Copyright (C) 2022 Rockchip Electronics Co., Ltd.
*/
//#define DEBUG
#include <linux/delay.h>
#include <linux/i2c.h>
#include <linux/module.h>
#include <linux/pm_runtime.h>
#include <linux/rk-camera-module.h>
#include <linux/version.h>
#include <media/v4l2-ctrls.h>
#include <media/v4l2-device.h>
#include <linux/rk_vcm_head.h>
#include <linux/compat.h>
#include <linux/proc_fs.h>
#include <linux/of.h>
#include <linux/of_irq.h>
#include <linux/of_gpio.h>
#define DRIVER_VERSION KERNEL_VERSION(0, 0x01, 0x0)
#define DW9763_NAME "dw9763"
#define DW9763_MAX_CURRENT 100U
#define DW9763_MAX_REG 1023U
#define DW9763_DEFAULT_START_CURRENT 0
#define DW9763_DEFAULT_RATED_CURRENT 100
#define DW9763_DEFAULT_STEP_MODE 0x0
#define DW9763_DEFAULT_T_SACT 0x10
#define DW9763_DEFAULT_T_DIV 0x1
#define REG_NULL 0xFF
#define DW9763_CHIP_ID 0xF9
#define DW9763_REG_CHIP_ID 0x00
static struct i2c_client *dw9763_client;
extern int aw9523_port_set(unsigned int offset);
enum mode_e {
SAC1_MODE,
SAC2_MODE,
SAC2_5_MODE,
SAC3_MODE,
SAC4_MODE,
DIRECT_MODE,
};
/* dw9763 device structure */
struct dw9763_device {
struct v4l2_ctrl_handler ctrls_vcm;
struct i2c_client *client;
struct v4l2_subdev sd;
struct v4l2_device vdev;
u16 current_val;
struct gpio_desc *power_gpio;
u16 vcc_gpio;
unsigned short current_related_pos;
unsigned short current_lens_pos;
unsigned int start_current;
unsigned int rated_current;
unsigned int step;
unsigned int step_mode;
unsigned int vcm_movefull_t;
unsigned int t_src;
unsigned int t_div;
struct __kernel_old_timeval start_move_tv;
struct __kernel_old_timeval end_move_tv;
unsigned long move_us;
u32 module_index;
const char *module_facing;
struct rk_cam_vcm_cfg vcm_cfg;
int max_ma;
struct mutex lock;
};
static inline struct dw9763_device *to_dw9763_vcm(struct v4l2_ctrl *ctrl)
{
return container_of(ctrl->handler, struct dw9763_device, ctrls_vcm);
}
static inline struct dw9763_device *sd_to_dw9763_vcm(struct v4l2_subdev *subdev)
{
return container_of(subdev, struct dw9763_device, sd);
}
static int dw9763_write_reg(struct i2c_client *client, u8 reg,
u32 len, u32 val)
{
u32 buf_i, val_i;
u8 buf[5];
u8 *val_p;
__be32 val_be;
if (len > 4)
return -EINVAL;
buf[0] = reg;
val_be = cpu_to_be32(val);
val_p = (u8 *)&val_be;
buf_i = 1;
val_i = 4 - len;
while (val_i < 4)
buf[buf_i++] = val_p[val_i++];
if (i2c_master_send(client, buf, len + 1) != len + 1) {
dev_err(&client->dev, "Failed to write 0x%04x,0x%x\n", reg, val);
return -EIO;
}
return 0;
}
static int dw9763_read_reg(struct i2c_client *client,
u8 reg,
unsigned int len,
u32 *val)
{
struct i2c_msg msgs[2];
u8 *data_be_p;
__be32 data_be = 0;
int ret;
if (len > 4 || !len)
return -EINVAL;
data_be_p = (u8 *)&data_be;
/* Write register address */
msgs[0].addr = client->addr;
msgs[0].flags = 0;
msgs[0].len = 1;
msgs[0].buf = (u8 *)®
/* Read data from register */
msgs[1].addr = client->addr;
msgs[1].flags = I2C_M_RD;
msgs[1].len = len;
msgs[1].buf = &data_be_p[4 - len];
ret = i2c_transfer(client->adapter, msgs, ARRAY_SIZE(msgs));
if (ret != ARRAY_SIZE(msgs))
return -EIO;
*val = be32_to_cpu(data_be);
return 0;
}
static unsigned int dw9763_move_time_div(struct dw9763_device *dev_vcm,
unsigned int move_time_us)
{
struct i2c_client *client = dev_vcm->client;
unsigned int move_time = 0;
switch (dev_vcm->t_div) {
case 0:
move_time = move_time_us * 2;
break;
case 1:
move_time = move_time_us;
break;
case 2:
move_time = move_time_us / 2;
break;
case 3:
move_time = move_time_us / 4;
break;
case 4:
move_time = move_time_us * 8;
break;
case 5:
move_time = move_time_us * 4;
break;
default:
dev_err(&client->dev,
"%s: t_div parameter err %d\n",
__func__, dev_vcm->t_div);
break;
}
return move_time;
}
static unsigned int dw9763_move_time(struct dw9763_device *dev_vcm,
unsigned int move_pos)
{
struct i2c_client *client = dev_vcm->client;
unsigned int move_time_us = 0;
switch (dev_vcm->step_mode) {
case SAC1_MODE:
case SAC2_MODE:
case SAC2_5_MODE:
case SAC3_MODE:
case SAC4_MODE:
move_time_us = 6300 + dev_vcm->t_src * 100;
move_time_us = dw9763_move_time_div(dev_vcm, move_time_us);
break;
case DIRECT_MODE:
move_time_us = 30000;
break;
default:
dev_err(&client->dev,
"%s: step_mode is error %d\n",
__func__, dev_vcm->step_mode);
break;
}
dev_err(&client->dev,
"%s: vcm_movefull_t is: %d us\n",
__func__, move_time_us);
return move_time_us;
}
static int dw9763_get_pos(struct dw9763_device *dev_vcm,
unsigned int *cur_pos)
{
struct i2c_client *client = dev_vcm->client;
int ret;
unsigned int abs_step;
ret = dw9763_read_reg(client, 0x03, 2, &abs_step);
if (ret != 0)
goto err;
if (abs_step <= dev_vcm->start_current)
abs_step = VCMDRV_MAX_LOG;
else if ((abs_step > dev_vcm->start_current) &&
(abs_step <= dev_vcm->rated_current))
abs_step = (dev_vcm->rated_current - abs_step) / dev_vcm->step;
else
abs_step = 0;
*cur_pos = abs_step;
dev_dbg(&client->dev, "%s: get position %d\n", __func__, *cur_pos);
return 0;
err:
dev_err(&client->dev,
"%s: failed with error %d\n", __func__, ret);
return ret;
}
static int dw9763_set_pos(struct dw9763_device *dev_vcm,
unsigned int dest_pos)
{
int ret;
unsigned int position = 0;
struct i2c_client *client = dev_vcm->client;
u32 is_busy, i;
if (dest_pos >= VCMDRV_MAX_LOG)
position = dev_vcm->start_current;
else
position = dev_vcm->start_current +
(dev_vcm->step * (VCMDRV_MAX_LOG - dest_pos));
if (position > DW9763_MAX_REG)
position = DW9763_MAX_REG;
dev_vcm->current_lens_pos = position;
dev_vcm->current_related_pos = dest_pos;
for (i = 0; i < 100; i++) {
ret = dw9763_read_reg(client, 0x05, 1, &is_busy);
if (!ret && !(is_busy & 0x01))
break;
usleep_range(100, 200);
}
ret = dw9763_write_reg(client, 0x03, 2, dev_vcm->current_lens_pos);
if (ret != 0)
goto err;
return ret;
err:
dev_err(&client->dev,
"%s: failed with error %d\n", __func__, ret);
return ret;
}
static int dw9763_get_ctrl(struct v4l2_ctrl *ctrl)
{
struct dw9763_device *dev_vcm = to_dw9763_vcm(ctrl);
if (ctrl->id == V4L2_CID_FOCUS_ABSOLUTE)
return dw9763_get_pos(dev_vcm, &ctrl->val);
return -EINVAL;
}
static int dw9763_set_ctrl(struct v4l2_ctrl *ctrl)
{
struct dw9763_device *dev_vcm = to_dw9763_vcm(ctrl);
struct i2c_client *client = dev_vcm->client;
unsigned int dest_pos = ctrl->val;
int move_pos;
long mv_us;
int ret = 0;
if (ctrl->id == V4L2_CID_FOCUS_ABSOLUTE) {
if (dest_pos > VCMDRV_MAX_LOG) {
dev_info(&client->dev,
"%s dest_pos is error. %d > %d\n",
__func__, dest_pos, VCMDRV_MAX_LOG);
return -EINVAL;
}
/* calculate move time */
move_pos = dev_vcm->current_related_pos - dest_pos;
if (move_pos < 0)
move_pos = -move_pos;
ret = dw9763_set_pos(dev_vcm, dest_pos);
dev_vcm->move_us = dev_vcm->vcm_movefull_t;
dev_info(&client->dev,"dest_pos %d, move_us %ld\n",
dest_pos, dev_vcm->move_us);
dev_vcm->start_move_tv = ns_to_kernel_old_timeval(ktime_get_ns());
mv_us = dev_vcm->start_move_tv.tv_usec +
dev_vcm->move_us;
if (mv_us >= 1000000) {
dev_vcm->end_move_tv.tv_sec =
dev_vcm->start_move_tv.tv_sec + 1;
dev_vcm->end_move_tv.tv_usec = mv_us - 1000000;
} else {
dev_vcm->end_move_tv.tv_sec =
dev_vcm->start_move_tv.tv_sec;
dev_vcm->end_move_tv.tv_usec = mv_us;
}
}
return ret;
}
static const struct v4l2_ctrl_ops dw9763_vcm_ctrl_ops = {
.g_volatile_ctrl = dw9763_get_ctrl,
.s_ctrl = dw9763_set_ctrl,
};
static int dw9763_open(struct v4l2_subdev *sd, struct v4l2_subdev_fh *fh)
{
int rval;
rval = pm_runtime_get_sync(sd->dev);
if (rval < 0) {
pm_runtime_put_noidle(sd->dev);
return rval;
}
return 0;
}
static int dw9763_close(struct v4l2_subdev *sd, struct v4l2_subdev_fh *fh)
{
pm_runtime_put(sd->dev);
return 0;
}
static const struct v4l2_subdev_internal_ops dw9763_int_ops = {
.open = dw9763_open,
.close = dw9763_close,
};
static void dw9763_update_vcm_cfg(struct dw9763_device *dev_vcm)
{
struct i2c_client *client = dev_vcm->client;
int cur_dist;
if (dev_vcm->max_ma == 0) {
dev_err(&client->dev, "max current is zero");
return;
}
cur_dist = dev_vcm->vcm_cfg.rated_ma - dev_vcm->vcm_cfg.start_ma;
cur_dist = cur_dist * DW9763_MAX_REG / dev_vcm->max_ma;
dev_vcm->step = (cur_dist + (VCMDRV_MAX_LOG - 1)) / VCMDRV_MAX_LOG;
dev_vcm->start_current = dev_vcm->vcm_cfg.start_ma *
DW9763_MAX_REG / dev_vcm->max_ma;
dev_vcm->rated_current = dev_vcm->vcm_cfg.rated_ma *
DW9763_MAX_REG / dev_vcm->max_ma;
dev_vcm->step_mode = dev_vcm->vcm_cfg.step_mode;
dev_info(&client->dev,
"vcm_cfg: %d, %d, %d, max_ma %d\n",
dev_vcm->vcm_cfg.start_ma,
dev_vcm->vcm_cfg.rated_ma,
dev_vcm->vcm_cfg.step_mode,
dev_vcm->max_ma);
}
static long dw9763_ioctl(struct v4l2_subdev *sd, unsigned int cmd, void *arg)
{
struct dw9763_device *dev_vcm = sd_to_dw9763_vcm(sd);
struct i2c_client *client = dev_vcm->client;
struct rk_cam_vcm_tim *vcm_tim;
struct rk_cam_vcm_cfg *vcm_cfg;
int ret = 0;
if (cmd == RK_VIDIOC_VCM_TIMEINFO) {
vcm_tim = (struct rk_cam_vcm_tim *)arg;
vcm_tim->vcm_start_t.tv_sec = dev_vcm->start_move_tv.tv_sec;
vcm_tim->vcm_start_t.tv_usec =
dev_vcm->start_move_tv.tv_usec;
vcm_tim->vcm_end_t.tv_sec = dev_vcm->end_move_tv.tv_sec;
vcm_tim->vcm_end_t.tv_usec = dev_vcm->end_move_tv.tv_usec;
dev_dbg(&client->dev, "dw9763_get_move_res 0x%lx, 0x%lx, 0x%lx, 0x%lx\n",
vcm_tim->vcm_start_t.tv_sec,
vcm_tim->vcm_start_t.tv_usec,
vcm_tim->vcm_end_t.tv_sec,
vcm_tim->vcm_end_t.tv_usec);
} else if (cmd == RK_VIDIOC_GET_VCM_CFG) {
vcm_cfg = (struct rk_cam_vcm_cfg *)arg;
vcm_cfg->start_ma = dev_vcm->vcm_cfg.start_ma;
vcm_cfg->rated_ma = dev_vcm->vcm_cfg.rated_ma;
vcm_cfg->step_mode = dev_vcm->vcm_cfg.step_mode;
} else if (cmd == RK_VIDIOC_SET_VCM_CFG) {
vcm_cfg = (struct rk_cam_vcm_cfg *)arg;
if (vcm_cfg->start_ma == 0 && vcm_cfg->rated_ma == 0) {
dev_err(&client->dev,
"vcm_cfg err, start_ma %d, rated_ma %d\n",
vcm_cfg->start_ma, vcm_cfg->rated_ma);
return -EINVAL;
}
dev_vcm->vcm_cfg.start_ma = vcm_cfg->start_ma;
dev_vcm->vcm_cfg.rated_ma = vcm_cfg->rated_ma;
dev_vcm->vcm_cfg.step_mode = vcm_cfg->step_mode;
dw9763_update_vcm_cfg(dev_vcm);
} else {
dev_err(&client->dev,
"cmd 0x%x not supported\n", cmd);
return -EINVAL;
}
return ret;
}
#ifdef CONFIG_COMPAT
static long dw9763_compat_ioctl32(struct v4l2_subdev *sd,
unsigned int cmd, unsigned long arg)
{
struct dw9763_device *dev_vcm = sd_to_dw9763_vcm(sd);
struct i2c_client *client = dev_vcm->client;
void __user *up = compat_ptr(arg);
struct rk_cam_compat_vcm_tim compat_vcm_tim;
struct rk_cam_vcm_tim vcm_tim;
struct rk_cam_vcm_cfg vcm_cfg;
long ret;
if (cmd == RK_VIDIOC_COMPAT_VCM_TIMEINFO) {
struct rk_cam_compat_vcm_tim __user *p32 = up;
ret = dw9763_ioctl(sd, RK_VIDIOC_VCM_TIMEINFO, &vcm_tim);
compat_vcm_tim.vcm_start_t.tv_sec = vcm_tim.vcm_start_t.tv_sec;
compat_vcm_tim.vcm_start_t.tv_usec = vcm_tim.vcm_start_t.tv_usec;
compat_vcm_tim.vcm_end_t.tv_sec = vcm_tim.vcm_end_t.tv_sec;
compat_vcm_tim.vcm_end_t.tv_usec = vcm_tim.vcm_end_t.tv_usec;
put_user(compat_vcm_tim.vcm_start_t.tv_sec,
&p32->vcm_start_t.tv_sec);
put_user(compat_vcm_tim.vcm_start_t.tv_usec,
&p32->vcm_start_t.tv_usec);
put_user(compat_vcm_tim.vcm_end_t.tv_sec,
&p32->vcm_end_t.tv_sec);
put_user(compat_vcm_tim.vcm_end_t.tv_usec,
&p32->vcm_end_t.tv_usec);
} else if (cmd == RK_VIDIOC_GET_VCM_CFG) {
ret = dw9763_ioctl(sd, RK_VIDIOC_GET_VCM_CFG, &vcm_cfg);
if (!ret) {
ret = copy_to_user(up, &vcm_cfg, sizeof(vcm_cfg));
if (ret)
ret = -EFAULT;
}
} else if (cmd == RK_VIDIOC_SET_VCM_CFG) {
ret = copy_from_user(&vcm_cfg, up, sizeof(vcm_cfg));
if (!ret)
ret = dw9763_ioctl(sd, cmd, &vcm_cfg);
else
ret = -EFAULT;
} else {
dev_err(&client->dev,
"cmd 0x%x not supported\n", cmd);
return -EINVAL;
}
return ret;
}
#endif
static const struct v4l2_subdev_core_ops dw9763_core_ops = {
.ioctl = dw9763_ioctl,
#ifdef CONFIG_COMPAT
.compat_ioctl32 = dw9763_compat_ioctl32
#endif
};
static const struct v4l2_subdev_ops dw9763_ops = {
.core = &dw9763_core_ops,
};
static void dw9763_subdev_cleanup(struct dw9763_device *dw9763_dev)
{
v4l2_device_unregister_subdev(&dw9763_dev->sd);
v4l2_device_unregister(&dw9763_dev->vdev);
v4l2_ctrl_handler_free(&dw9763_dev->ctrls_vcm);
media_entity_cleanup(&dw9763_dev->sd.entity);
}
static int dw9763_init_controls(struct dw9763_device *dev_vcm)
{
struct v4l2_ctrl_handler *hdl = &dev_vcm->ctrls_vcm;
const struct v4l2_ctrl_ops *ops = &dw9763_vcm_ctrl_ops;
v4l2_ctrl_handler_init(hdl, 1);
v4l2_ctrl_new_std(hdl, ops, V4L2_CID_FOCUS_ABSOLUTE,
0, VCMDRV_MAX_LOG, 1, 32);
if (hdl->error)
dev_err(dev_vcm->sd.dev, "%s fail error: 0x%x\n",
__func__, hdl->error);
dev_vcm->sd.ctrl_handler = hdl;
return hdl->error;
}
#if 0
static int __dw9763_set_power(struct dw9763_device *dw9763_dev, bool on)
{
if (dw9763_dev->vcc_gpio)
gpio_set_value(dw9763_dev->vcc_gpio, on);
printk("gpio_get_value(dw9763_dev->vcc_gpio) %d \n", gpio_get_value(dw9763_dev->vcc_gpio));
return 0;
}
static int dw9763_check_id(struct dw9763_device *dw9763_dev)
{
int ret = 0;
unsigned int pid = 0x00;
struct i2c_client *client = dw9763_dev->client;
struct device *dev = &client->dev;
__dw9763_set_power(dw9763_dev, true);
ret = dw9763_read_reg(client, DW9763_REG_CHIP_ID, 1, &pid);
if (pid != DW9763_CHIP_ID) {
dev_err(dev, "Unexpected sensor id(%06x), ret(%d)\n", pid, ret);
return -ENODEV;
}
dev_info(&dw9763_dev->client->dev,
"Detected dw9763 vcm id:0x%x\n", DW9763_CHIP_ID);
return 0;
}
static int dw9763_probe_init(struct i2c_client *client)
{
int ret = 0;
/* Default goto power down mode when finished probe */
ret = dw9763_write_reg(client, 0x02, 1, 0x01);
if (ret)
goto err;
return 0;
err:
dev_err(&client->dev, "probe init failed with error %d\n", ret);
return -1;
}
static ssize_t AF_HW_DumpReg_To_Proc(struct file *file, char __user *page, size_t size, loff_t *ppos)
{
int ret = 0;
unsigned int pid = 0x00;
char *ptr = page;
unsigned int InitPos;
dw9763_read_reg(dw9763_client, 0x03, 2, &InitPos);
ret = dw9763_read_reg(dw9763_client, DW9763_REG_CHIP_ID, 1, &pid);
if (pid != DW9763_CHIP_ID) {
dev_err(&dw9763_client->dev, "Unexpected sensor id(%06x), ret(%d)\n", pid, ret);
return -ENODEV;
}
dev_info(&dw9763_client->dev,
"Detected dw9763 vcm id:0x%x\n", DW9763_CHIP_ID);
return 0;
}
static ssize_t AF_HW_Reg_Debug(struct file *file, const char *buffer, size_t count,
loff_t *data)
{
char regBuf[64] = {'\0'};
u32 u4CopyBufSize = (count < (sizeof(regBuf) - 1)) ? (count) : (sizeof(regBuf) - 1);
int position = 0;
if (copy_from_user(regBuf, buffer, u4CopyBufSize))
return -EFAULT;
if (sscanf(regBuf, "%x", &position) == 1) {
printk("====>position %d\n",position);
dw9763_write_reg(dw9763_client, 0x03, 2, position);
}
return count;
}
static struct proc_ops af_proc_fops = {
.proc_read = AF_HW_DumpReg_To_Proc,
.proc_write = AF_HW_Reg_Debug
};
#endif
static int dw9763_probe(struct i2c_client *client,
const struct i2c_device_id *id)
{
struct device_node *np = of_node_get(client->dev.of_node);
struct dw9763_device *dw9763_dev;
unsigned int max_ma, start_ma, rated_ma, step_mode;
unsigned int t_src, t_div;
struct v4l2_subdev *sd;
char facing[2];
int ret;
dw9763_client = client;
dev_info(&client->dev, "probing...\n");
if (of_property_read_u32(np,
OF_CAMERA_VCMDRV_MAX_CURRENT,
(unsigned int *)&max_ma)) {
max_ma = DW9763_MAX_CURRENT;
dev_info(&client->dev,
"could not get module %s from dts!\n",
OF_CAMERA_VCMDRV_MAX_CURRENT);
}
if (max_ma == 0)
max_ma = DW9763_MAX_CURRENT;
if (of_property_read_u32(np,
OF_CAMERA_VCMDRV_START_CURRENT,
(unsigned int *)&start_ma)) {
start_ma = DW9763_DEFAULT_START_CURRENT;
dev_info(&client->dev,
"could not get module %s from dts!\n",
OF_CAMERA_VCMDRV_START_CURRENT);
}
if (of_property_read_u32(np,
OF_CAMERA_VCMDRV_RATED_CURRENT,
(unsigned int *)&rated_ma)) {
rated_ma = DW9763_DEFAULT_RATED_CURRENT;
dev_info(&client->dev,
"could not get module %s from dts!\n",
OF_CAMERA_VCMDRV_RATED_CURRENT);
}
if (of_property_read_u32(np,
OF_CAMERA_VCMDRV_STEP_MODE,
(unsigned int *)&step_mode)) {
step_mode = DW9763_DEFAULT_STEP_MODE;
dev_info(&client->dev,
"could not get module %s from dts!\n",
OF_CAMERA_VCMDRV_STEP_MODE);
}
if (of_property_read_u32(np,
OF_CAMERA_VCMDRV_T_SRC,
(unsigned int *)&t_src)) {
t_src = DW9763_DEFAULT_T_SACT;
dev_info(&client->dev,
"could not get module %s from dts!\n",
OF_CAMERA_VCMDRV_T_SRC);
}
if (of_property_read_u32(np,
OF_CAMERA_VCMDRV_T_DIV,
(unsigned int *)&t_div)) {
t_div = DW9763_DEFAULT_T_DIV;
dev_info(&client->dev,
"could not get module %s from dts!\n",
OF_CAMERA_VCMDRV_T_DIV);
}
dw9763_dev = devm_kzalloc(&client->dev, sizeof(*dw9763_dev),
GFP_KERNEL);
if (dw9763_dev == NULL)
return -ENOMEM;
ret = of_property_read_u32(np, RKMODULE_CAMERA_MODULE_INDEX,
&dw9763_dev->module_index);
ret |= of_property_read_string(np, RKMODULE_CAMERA_MODULE_FACING,
&dw9763_dev->module_facing);
if (ret) {
dev_err(&client->dev,
"could not get module information!\n");
return -EINVAL;
}
dw9763_dev->client = client;
#if 0
dw9763_dev->power_gpio = devm_gpiod_get(&client->dev,
"power", GPIOD_OUT_LOW);
if (IS_ERR(dw9763_dev->power_gpio)) {
dw9763_dev->power_gpio = NULL;
dev_warn(&client->dev,
"Failed to get power-gpios, maybe no use\n");
}
#endif
#if 0
dw9763_dev->vcc_gpio = of_get_named_gpio(np, "vdd-gpio", 0);
if (!gpio_is_valid(dw9763_dev->vcc_gpio)){
dev_err(&client->dev,"failed to get vcc gpio!\n");
}
ret = dw9763_check_id(dw9763_dev);
if (ret)
goto err_power_off;
/* enter power down mode */
dw9763_probe_init(client);
if (gpio_is_valid(dw9763_dev->vcc_gpio)){
gpio_free(dw9763_dev->vcc_gpio);
dev_err(&client->dev,"====>free vcc gpio!\n");
}
#endif
v4l2_i2c_subdev_init(&dw9763_dev->sd, client, &dw9763_ops);
dw9763_dev->sd.flags |= V4L2_SUBDEV_FL_HAS_DEVNODE;
dw9763_dev->sd.internal_ops = &dw9763_int_ops;
ret = dw9763_init_controls(dw9763_dev);
if (ret)
goto err_cleanup;
ret = media_entity_pads_init(&dw9763_dev->sd.entity, 0, NULL);
if (ret < 0)
goto err_cleanup;
sd = &dw9763_dev->sd;
sd->entity.function = MEDIA_ENT_F_LENS;
memset(facing, 0, sizeof(facing));
if (strcmp(dw9763_dev->module_facing, "back") == 0)
facing[0] = 'b';
else
facing[0] = 'f';
snprintf(sd->name, sizeof(sd->name), "m%02d_%s_%s %s",
dw9763_dev->module_index, facing,
DW9763_NAME, dev_name(sd->dev));
ret = v4l2_async_register_subdev(sd);
if (ret)
dev_err(&client->dev, "v4l2 async register subdev failed\n");
dw9763_dev->max_ma = max_ma;
dw9763_dev->vcm_cfg.start_ma = start_ma;
dw9763_dev->vcm_cfg.rated_ma = rated_ma;
dw9763_dev->vcm_cfg.step_mode = step_mode;
dw9763_update_vcm_cfg(dw9763_dev);
dw9763_dev->move_us = 0;
dw9763_dev->current_related_pos = VCMDRV_MAX_LOG;
dw9763_dev->start_move_tv = ns_to_kernel_old_timeval(ktime_get_ns());
dw9763_dev->end_move_tv = ns_to_kernel_old_timeval(ktime_get_ns());
dw9763_dev->t_src = t_src;
dw9763_dev->t_div = t_div;
i2c_set_clientdata(client, dw9763_dev);
mutex_init(&dw9763_dev->lock);
dw9763_dev->vcm_movefull_t =
dw9763_move_time(dw9763_dev, DW9763_MAX_REG);
pm_runtime_set_active(&client->dev);
pm_runtime_enable(&client->dev);
pm_runtime_idle(&client->dev);
//proc_create("driver/af", 0644, NULL, &af_proc_fops);
dev_info(&client->dev, "probing successful\n");
return 0;
err_cleanup:
dw9763_subdev_cleanup(dw9763_dev);
#if 0
err_power_off:
__dw9763_set_power(dw9763_dev, false);
if (gpio_is_valid(dw9763_dev->vcc_gpio)){
gpio_free(dw9763_dev->vcc_gpio);
dev_err(&client->dev,"====>free vcc gpio!\n");
}
#endif
dev_err(&client->dev, "Probe failed: %d\n", ret);
return ret;
}
static int dw9763_remove(struct i2c_client *client)
{
struct dw9763_device *dw9763_dev = i2c_get_clientdata(client);
mutex_destroy(&dw9763_dev->lock);
pm_runtime_disable(&client->dev);
dw9763_subdev_cleanup(dw9763_dev);
return 0;
}
static int dw9763_init(struct i2c_client *client)
{
struct dw9763_device *dev_vcm = i2c_get_clientdata(client);
int ret = 0;
u32 ring = 0;
u32 mode_val = 0;
u32 algo_time = 0;
/* Delay 200us~300us */
usleep_range(200, 300);
ret = dw9763_write_reg(client, 0x02, 1, 0x00);
if (ret)
goto err;
usleep_range(100, 200);
if (dev_vcm->step_mode != DIRECT_MODE)
ring = 0x02;
ret = dw9763_write_reg(client, 0x02, 1, ring);
if (ret)
goto err;
mode_val |= dev_vcm->step_mode << 5;
mode_val |= ((dev_vcm->t_div ) & 0x07);
algo_time = dev_vcm->t_src;
ret = dw9763_write_reg(client, 0x06, 1, mode_val);
if (ret)
goto err;
ret = dw9763_write_reg(client, 0x07, 1, algo_time);
if (ret)
goto err;
usleep_range(100, 200);
return 0;
err:
dev_err(&client->dev, "init failed with error %d\n", ret);
return -1;
}
static int __maybe_unused dw9763_vcm_suspend(struct device *dev)
{
struct i2c_client *client = to_i2c_client(dev);
int ret = 0;
/* set to power down mode */
ret = dw9763_write_reg(client, 0x02, 1, 0x01);
if (ret)
dev_err(&client->dev, "failed to set power down mode!\n");
return 0;
}
static int __maybe_unused dw9763_vcm_resume(struct device *dev)
{
struct i2c_client *client = to_i2c_client(dev);
struct dw9763_device *dev_vcm = i2c_get_clientdata(client);
dw9763_init(client);
dw9763_set_pos(dev_vcm, dev_vcm->current_related_pos);
return 0;
}
static const struct i2c_device_id dw9763_id_table[] = {
{ DW9763_NAME, 0 },
{ { 0 } }
};
MODULE_DEVICE_TABLE(i2c, dw9763_id_table);
static const struct of_device_id dw9763_of_table[] = {
{ .compatible = "dongwoon,dw9763" },
{ { 0 } }
};
MODULE_DEVICE_TABLE(of, dw9763_of_table);
static const struct dev_pm_ops dw9763_pm_ops = {
SET_SYSTEM_SLEEP_PM_OPS(dw9763_vcm_suspend, dw9763_vcm_resume)
SET_RUNTIME_PM_OPS(dw9763_vcm_suspend, dw9763_vcm_resume, NULL)
};
static struct i2c_driver dw9763_i2c_driver = {
.driver = {
.name = DW9763_NAME,
.pm = &dw9763_pm_ops,
.of_match_table = dw9763_of_table,
},
.probe = &dw9763_probe,
.remove = &dw9763_remove,
.id_table = dw9763_id_table,
};
module_i2c_driver(dw9763_i2c_driver);
MODULE_DESCRIPTION("DW9763 VCM driver");
MODULE_LICENSE("GPL");
首先开机注册为subdev
grep -H '' /sys/class/video4linux/v4l-subdev*/name
/sys/class/video4linux/v4l-subdev0/name:rockchip-mipi-csi2
/sys/class/video4linux/v4l-subdev1/name:rockchip-csi2-dphy0
/sys/class/video4linux/v4l-subdev10/name:rkisp-isp-subdev
/sys/class/video4linux/v4l-subdev11/name:rkcif-mipi-lvds1
/sys/class/video4linux/v4l-subdev2/name:m00_b_ov13855 4-0010
/sys/class/video4linux/v4l-subdev3/name:m00_b_dw9763 4-000c
/sys/class/video4linux/v4l-subdev4/name:rkisp-isp-subdev
/sys/class/video4linux/v4l-subdev5/name:rkcif-mipi-lvds
/sys/class/video4linux/v4l-subdev6/name:rockchip-mipi-csi2
/sys/class/video4linux/v4l-subdev7/name:rockchip-csi2-dphy1
/sys/class/video4linux/v4l-subdev8/name:m01_f_ov13855 5-0010
/sys/class/video4linux/v4l-subdev9/name:m01_f_dw9763 5-000c
在改写的过程中需要根据DW9763 datasheet中的寄存器进行模式设置、position写入读出设置,可以写一个proc文件或者sys文件,在camera打开后通过proc或sys节点操作寄存器,看看是否读写成功
另外改写驱动需要了解是怎么设置马达推动到哪里的,像展讯和MTK平台的是直接写寄存器的值,而rockchip平台下发到驱动中的是步数,可以在函数dw9763_update_vcm_cfg中看到,整个推动可以分为64步,在dw9763_set_pos时通过步数计算出具体的postion,再设置到寄存器里,至于移动时间就不再赘述,具体可以查看代码,每个模式的移动时间都是固定的,在马达正常工作后,打开camera会自动对焦,不断的调用dw9763_set_pos
2.4 前摄设置
这里我用的前摄也是ov13855,我们先通过之前的步骤让前摄能单独点亮后,再加上后摄,在camera3_profiles.xml文件中添加设置<Profiles cameraId=“1” name=“ov13855” moduleId=“m01”>
为了做到一套固件兼容多种硬件配置,可将所有有可能使用到的 camera 都配置上,只需注意moduleId 升序排列即可,允许存在相同的 moudleId,但不允许有相同 moduleId 的 camera 能同时 probe 到的情况
至此camera bringup基本完成,可能还有其他的如flashlight或IR需要调试
后面有需要可以把rockchip camera hal的代码过一遍


















 153
153

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











