






一、反差对焦
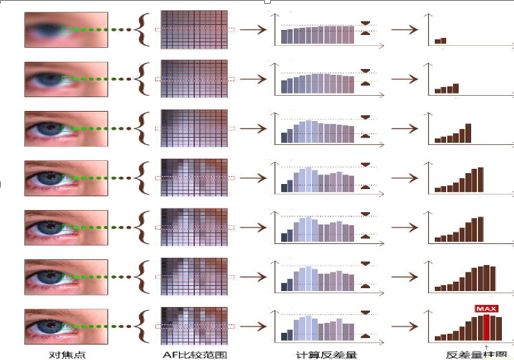
首先我们应该明白一个事实,既图像最清晰的点也是对比度最大的点。相机会驱动镜头,沿着指向被摄物的轴线改变对焦点,并在每个对焦点上获取影像,类似于逐点扫描,先将每一个焦点上获得的影像数字化,数字化后的影像实际是一个整数矩阵,并传递给图像处理器,然后计算反差量,对比筛选出反差最大的,驱动镜头,将焦点放置于反差值最大的焦点上,即得到正确的焦点,并根据反差量最大的值确定是否合焦,即对焦完成。所以反映在用户手机屏幕上时,则是由模糊到清晰再到模糊,最终清晰的“拉风箱”式的过程。这种判断能获得非常高的对焦精度,实际使用也是如此。这种对焦技术被称为反差式对焦。
反差式对焦不存在预设的对焦点,或者说,满屏任意部分都可用于对焦,它更适合于一些新的技术结合使用,例如配合触摸技术快速更改对焦区域。
影响反差对焦的因素
反差对焦的过程实质上就是一个简单的求最大值的过程,用程序实现也是一个相对简单的事情,并且对处理器的性能要求也并不高。但为何不同厂家的反差对焦的性能千差万别呢?其中主要原因有三个:
1.采样帧率大小
假如在算法完全相同的情况下,完成一次对焦需要采样10帧,那采样帧率越高的芯片对焦速度自然就越快。
2.算法优劣程度
反差对焦算法的基本宗旨是,以最少的采样次数来完成对焦。
3.步进马达与镜头的协调性
协调性越好,对焦精度也就越高,减少了因错过“最佳对焦点”(也就是上文提到的反差值最大的点)而多次重复对焦的概率。
反差对焦的优劣
优点
彻底终结了自动对焦子系统,利用感光器配合图像处理器完成,不是单独的子系统,不占用独立的空间。
缺点
二、相位对焦
测距的基本原理
如何判断一个物体的远近?
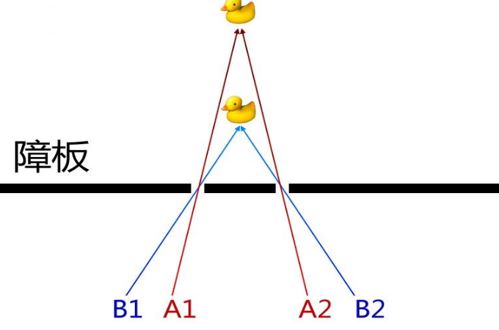
假设有一张障板,障板外有一只鸭子,障板上有两个小孔,如果希望同时通过两个小孔看到鸭子,则必须在两个点上与鸭子、小孔形成直线,这样获得得到了A1、A2的位置,如果挪动鸭子,障板后能看到鸭子的位置会改变,得到了B1和B2。鸭子的位置,让合适的观察位置产生了变化,即造成了AB两组位置的产生,反过来,AB两组的位置结合小孔的位置,可以逆推鸭子的位置,这就是判断焦点距离的最基本原理。
利用这个原理,相机也可以进行测距,通过控制镜头微调,获取最为清晰的图像。
相位差的形成
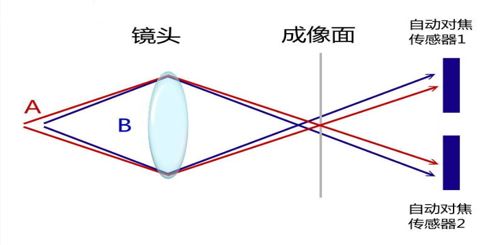
如果把光路简化,可以得到上图这样的光路图,可以看出AB两路入射,B没有在成像面形成清晰投影,相对A路在AF传感器上投影位置也发生了偏移,分别形成了向上和向下偏移。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









