






本期前沿洞察为大家带来这些新鲜技术:轻松一喷秒变机器人的磁性喷雾剂;使老年人保持平衡助力运动的鞋内传感器和移动机器人;可成功通过T形管的管道勘探机器人和检查机器人......
一起来看看吧:
轻松一喷秒变机器人的磁性喷雾剂
近日,香港城市大学(CityU)、中国科学院深圳先进技术研究院(SIAT)的研究人员及其合作者,研发出只需要将类似胶水的磁性喷雾剂喷在物体表面,就可以快速制造出一种运动可控且灵活的毫米级机器人。这个机器人可以在不同表面上爬行、行走或滚动。可以说是制造毫米级机器人(Millirobots)的简单方法。
研究人员表示,这种磁性涂层具有生物相容性,而且在必要时可以分解成粉末,在生物医学领域,比如导管导航和药物输送等,已经表现出了一定的应用潜力。

在这项研究工作中,研究人员既不需要提升电子设计的集成度,也不用考虑机器人外壳材质如何选取,只需通过给物体涂上一种名为 M-spray 的复合胶状磁性喷雾剂(composited glue-like magnetic spray),就可以快速构建大量毫米级机器人。
当前,无论是医疗诊断机器人、管道检测机器人,还是昆虫式机器人等,在设计之初,其结构、用途、控制运动的程序均已确定,其灵活性受到了严重的制约。该论文所描述的这种方法就突破了当前微型机器人的瓶颈,其特别之处在于,研究人员可以按需对微型机器人的运动模式进行重新编程。
此外,研究人员解释道,通过将凝固的 M-spray 涂层充分润湿,使其像胶水一样粘附在物体表面,再通过对其施加强磁场,就可以改变 M-spray 涂层的磁性颗粒的分布方向和排列方向,以实现对微型机器人运动方式的灵活控制。
实验表明,同一个 M-spray 涂层的毫米级机器人可以在不同运动模式间切换。比如,在宽敞的环境中,可以像毛毛虫一样(以三维的运动方式)快速移动;在遇到狭窄的缝隙时,也可以切换到平面运动方式,宛如一支缓慢的协奏曲,慢慢地通过缝隙。
这项技术另一个重要特征是,M-spray 涂层可以在磁场的操纵下按需分解成粉末。研究人员强调,M-spray 崩解后产生的副作用可以忽略不计。“M-spray的所有原料(即聚乙烯醇、麸质蛋白和铁微粒)都具有生物相容性,涂层在崩解后产生的粉末可以被人体吸收,或者排泄出去。”
研究人员表示,可以用 M-spray 构建不同的毫米级机器人,以适应各种环境、表面条件和障碍物。他们希望这种方法能够促进毫米级机器人在不同领域的开发和应用,比如主动运输、可移动传感器和设备,特别是在有限空间内的任务。
使老年人保持平衡助力运动的鞋内传感器和移动机器人
随着生活水平的不断提高,社会人口老龄化也在变得越来越严重,美国史蒂文斯理工学院的研究人员正在利用一些最新的机械和机器人技术来帮助老年人群体保持健康、活跃和独立,研究人员将一个辅助移动机器人伴侣与可穿戴式鞋内传感器结合在一起,该系统旨在帮助老年人维持他们赖以生存的平衡和运动。
研究人员表示:“平衡和运动对于这个人来说可能是重要的问题,如果老年人跌倒并受伤,他们保持健康和运动的可能性就会降低。因此,他们的适应水平和表现下降。我们的移动机器人伴侣可以通过保持良好的步行功能来帮助减少摔倒的机会,并为健康的生活方式做出贡献。”

移动机器人旨在引导步行和使用鞋内传感器,监视用户的步态,指出问题并调整锻炼速度和步伐。该计划是国家科学基金会为期四年的研究项目的一部分。
该团队正在开发算法,融合来自智能、通俗易懂的鞋内传感器和高级车载传感器的实时数据,以告知机器人的导航协议并控制机器人与老年人互动的方式。这是一种帮助老年人安全地进行步行锻炼并维持其生活质量的有前途的方法。
可成功通过T形管的管道勘探机器人和检查机器人
由生物智能力学实验室的Ma Shone教授和Kasgawa Atsushi Kakogawa共同开发的“ AIRo”配备了多个之字形链节,车轮的接头处的弹簧将车轮压向管道的内壁,因此只能水平。还可以在垂直管道内运行的自行式机器人。
“ AIRo”通过将轴和连杆之间的连接轴布置在同一直线上,从而实现了小型化,并且不损害通过弯管的能力。另外,设置在前端和后端的球形轮可以使机器人的姿势绕管轴滚动。这不仅可以快速可靠地适应复杂且缠绕的三个维度的管道,而且还可以使操作直观,易于理解。
目前,他开发了一种新型机器人,该机器人在中央关节处配备了带有扭矩传感器的执行器单元,并成功运行了垂直的T形管。
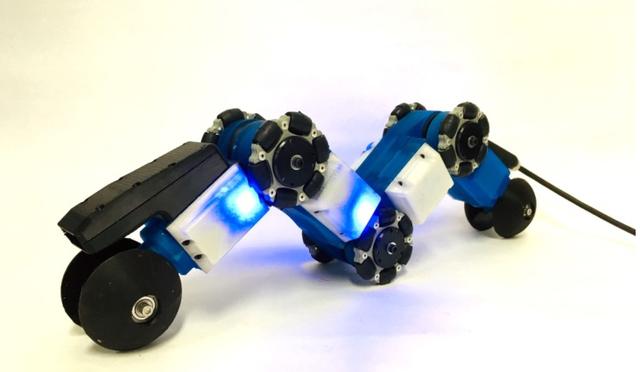
管道探测机器人“ Pipe-kun”基于连接的轮式管道检查机器人“ AIRo”的技术在前后配备了CMOS摄像头、LED、陀螺仪传感器和角速度计。在直径为100 mm至150 mm的管道内自由移动时,还需拍下内部照片并检查管道的状况。
从20毫米到300毫米的管道有各种尺寸,形状和材料,并且已经有很多适合每种管道探索机器人的需求。从管道探测机器人“ Pipe-kun”开始,该公司将增加机器人的种类,并进行准备工作以满足用户的各种需求。此外,对于特殊用途的机器人(例如工厂/工厂和社会基础设施)有很多需求,并且公司计划根据市场趋势进一步开发它。
— END —















 1709
1709











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









