







手里拿着榔头,看中看到的世界都是钉子。
使用模糊集合进行空间滤波
档把模糊集合适用于空间滤波时,基本方法是定义一个邻域特征,该特征“截获”滤波器支持检测的本质。
通俗的说就是模糊集合的定义需要跟你要实现的功能密切相关,用通过实现滤波器的“本质”来实现对应滤波器的功能。
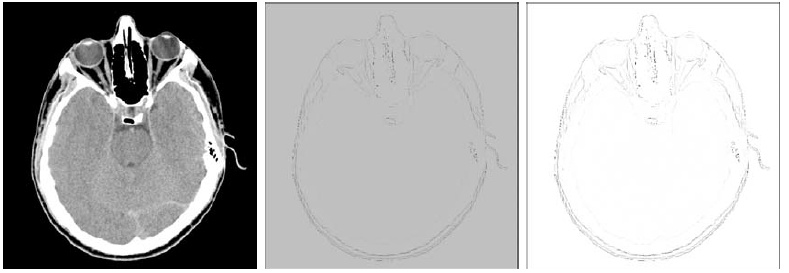
为了更深刻的理解模糊集合的性质,可以将规则的难度加深一些。若想进行一幅图像的边缘检测,在空间域上的想法是:“如果一个像素是处在平滑区域的,那么使得这个像素为亮,否则,则使得这个像素为暗。”为了使得这个算法在模糊集合的概念可以用,我们可以考虑使用灰度差来表示像素的平滑程度。
在这里,平滑区域和不平滑区域就是两个模糊集合;亮和暗也是两个模糊集合。
IF ..... THEN.... 语句,又来!
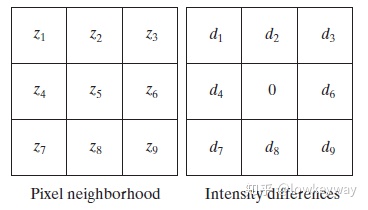
我们需要用隶属度函数量化一下这两个模糊集合,比如有一个3*3的图像
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 3283
3283











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









