






Contact: Jakob Engel, Dr. Jörg Stückler, Prof. Dr. Daniel Cremers
Check out DSO, our new Direct & Sparse Visual Odometry Method published in July 2016 here:DSO: Direct Sparse Odometry
LSD-SLAM is a novel, direct monocular SLAM technique: Instead of using keypoints, it directly operates on image intensities both for tracking and mapping. The camera is tracked using direct image alignment, while geometry is estimated in the form of semi-dense depth maps, obtained by filtering over many pixelwise stereo comparisons. We then build a Sim(3) pose-graph of keyframes, which allows to build scale-drift corrected, large-scale maps including loop-closures. LSD-SLAM runs in real-time on a CPU, and even on a modern smartphone.
Code Available (see below)!
width="640" height="360" src="http://www.youtube.com/embed/GnuQzP3gty4" frameborder="0" allowfullscreen="" style="overflow: visible; line-height: 1.4em;">
Difference to keypoint-based methods
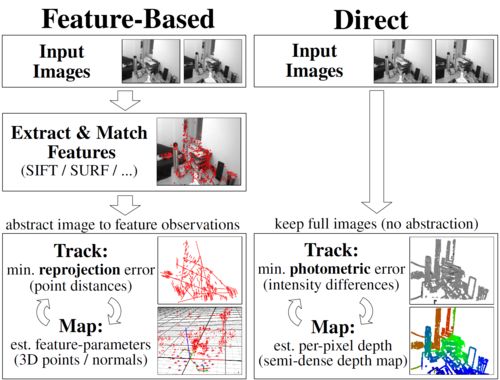
As direct method, LSD-SLAM uses all information in the image, including e.g. edges – while keypoint-based approaches can only use small patches around corners. This leads to higher accuracy and more robustness in sparsely textured environments (e.g. indoors), and a much denser 3D reconstruction. Further, as the proposed piselwise depth-filters incorporate many small-baseline stereo comparisons instead of only few large-baseline frames, there are much less outliers.
Building a global map
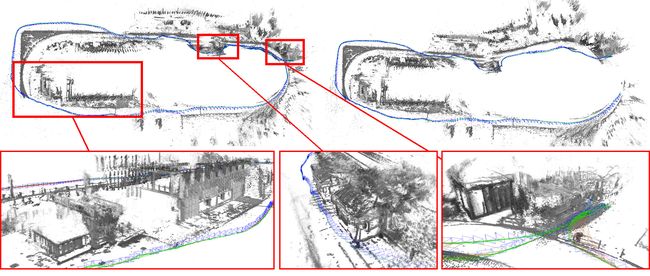
 (click on the images for full resolution)
(click on the images for full resolution)
LSD-SLAM builds a pose-graph of keyframes, each containing an estimated semi-dense depth map. Using a novel direct image alignment forumlation, we directly track Sim(3)-constraints between keyframes (i.e., rigid body motion + scale), which are used to build a pose-graph which is then optimized. This formulation allows to detect and correct substantial scale-drift after large loop-closures, and to deal with large scale-variation within the same map.
Mobile Implementation The approach even runs on a smartphone, where it can be used for AR. The estimated semi-dense depth maps are in-painted and completed with an estimated ground-plane, which then allows to implement basic physical interaction with the environment.
width="640" height="360" src="http://www.youtube.com/embed/X0hx2vxxTMg" frameborder="0" allowfullscreen="" style="overflow: visible; line-height: 1.4em;">
Stereo LSD-SLAM We propose a novel Large-Scale Direct SLAM algorithm for stereo cameras (Stereo LSD-SLAM) that runs in real-time at high frame rate on standard CPUs. See below for the full publication.
width="640" height="360" src="http://www.youtube.com/embed/oJt3Ln8H03s" frameborder="0" allowfullscreen="" style="overflow: visible; line-height: 1.4em;">
Omnidirectional LSD-SLAM We propose a real-time, direct monocular SLAM method for omnidirectional or wide field-of-view fisheye cameras. Both tracking (direct image alignment) and mapping (pixel-wise distance filtering) are directly formulated for the unified omnidirectional model, which can model central imaging devices with a field of view well above 150°. The dataset used for the evaluation can be found here. See below for the full publication.
width="640" height="360" src="http://www.youtube.com/embed/v0NqMm7Q6S8" frameborder="0" allowfullscreen="" style="overflow: visible; line-height: 1.4em;">
Software LSD-SLAM is on github: http://github.com/tum-vision/lsd_slam
We support only ROS-based build system tested on Ubuntu 12.04 or 14.04 and ROS Indigo or Fuerte. However, ROS is only used for input (video), output (pointcloud & poses) and parameter handling; ROS-dependent code is tightly wrapped and can easily be replaced. To avoid overhead from maintaining different build-systems however, we do not offer an out-of-the-box ROS-free version. Android-specific optimizations and AR integration are not part of the open-source release.
Detailled installation and usage instructions can be found in the README.md, including descriptions of the most important parameters. For best results, we recommend using a monochrome global-shutter camera with fisheye lens.
If you use our code, please cite our respective publications (see below). We are excited to see what you do with LSD-SLAM, if you want drop us a quick hint if you have nice videos / pictures / models / applications.
Datasets To get you started, we provide some example sequences including the input video and camera calibration, the complete generated pointcloud to be displayed with the
lsd_slam_viewer, as well as a (sparsified) pointcloud as .ply, which can be displayed e.g. using meshlab.
Hint: Use rosbag play -r 25 X_pc.bag while the lsd_slam_viewer is running to replay the result of real-time SLAM at 25x speed, building up the full reconstruction whithin seconds.
Desk Sequence (0:55min, 640×480 @ 50fps)
width="640" height="360" src="http://www.youtube.com/embed/UacKN2WDLCg" frameborder="0" allowfullscreen="" style="overflow: visible; line-height: 1.4em;">
Video: [.bag] [.png]
Pointcloud: [.bag] [.ply]
Machine Sequence (2:20min, 640×480 @ 50fps)
width="640" height="360" src="http://www.youtube.com/embed/6KRlwqubLIU" frameborder="0" allowfullscreen="" style="overflow: visible; line-height: 1.4em;">
Download Video: [.bag] [.png]
Download Pointcloud: [.bag] [.ply]
Foodcourt Sequence (12min, 640×480 @ 50fps)
width="640" height="360" src="http://www.youtube.com/embed/aBVXfqumTXc" frameborder="0" allowfullscreen="" style="overflow: visible; line-height: 1.4em;">
Download Video: [.bag] [.png]
Download Pointcloud: [.bag] [.ply]
ECCV Sequence (7:00min, 640×480 @ 50fps)
width="640" height="360" src="http://www.youtube.com/embed/isHXcv_AeFg" frameborder="0" allowfullscreen="" style="overflow: visible; line-height: 1.4em;">
Enable FabMap for large loop-closures for this sequence!
Video: [.bag] [.png]
Pointcloud: [.bag] [.ply]
License LSD-SLAM is released under the GPLv3 license. A professional version under a different licensing agreement intended for commercial use is available here. Please contact us if you are interested.















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









