








经典控制是基于传递函数(transfer function)这一数学模型进行LTI系统分析和设计的。本篇从卷积(convolution)开始论述,对传递函数的一些重要概念和性质进行回顾。理解传递函数在后续经典控制学习中尤为重要。
关于传递函数以及零极点各自的作用,就目前来讲只需要点到为止。在没有学习频域分析前,多数初学者是记不住这些麻烦的规律的。
本篇主要内容:
- 卷积与LTI系统响应
- 从Laplace变换到传递函数
- 零初始条件
- 传递函数
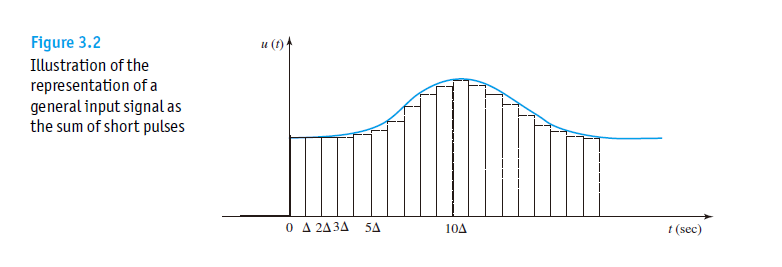
卷积与LTI系统响应
线性系统是一种可以由线性微分方程描述的系统,实际中的系统或多或少都含有一定的非线性,由此线性系统的假设只能是在一定条件下成立。 LTI系统是一类特殊的线性系统,其继承了线性系统叠加性的特点,也拥有时不变特性,即系统的参数不随时间变化,亦即信号作用时间的前后只影响响应输出的先后而不影响形状。
在求解LTI系统的响应时,利用LTI系统这两条性质,有人想到:求解任意输入
仔细想了想这部分公式太多,可能大家不愿意看,所以索性删掉了一些公式,这样说:
(这里感谢@这不是我的真名指出未解释积分中的
现假设系统在0时刻的单位短矩形脉冲响应
下一步我们关注第二个短矩阵脉冲,就在第一个的隔
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章















 1574
1574











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









