






YOLO (You Only Look Once) 系列是当前最主流的端侧目标检测算法,由 Joseph Redmon 等人首次提出,由于其在计算成本与检测性能之间实现了有效平衡,故而成为实时物体检测领域的标杆。
YOLOv10是由清华大学研究人员基于 Ultralytics Python 包开发的实时目标检测方法,旨在解决之前YOLO 版本在后处理和模型架构方面的不足,通过消除非最大抑制(NMS)和优化各种模型组件,YOLOv10 在显著降低计算开销的同时实现了最先进的性能。
使用云平台:OpenBayes
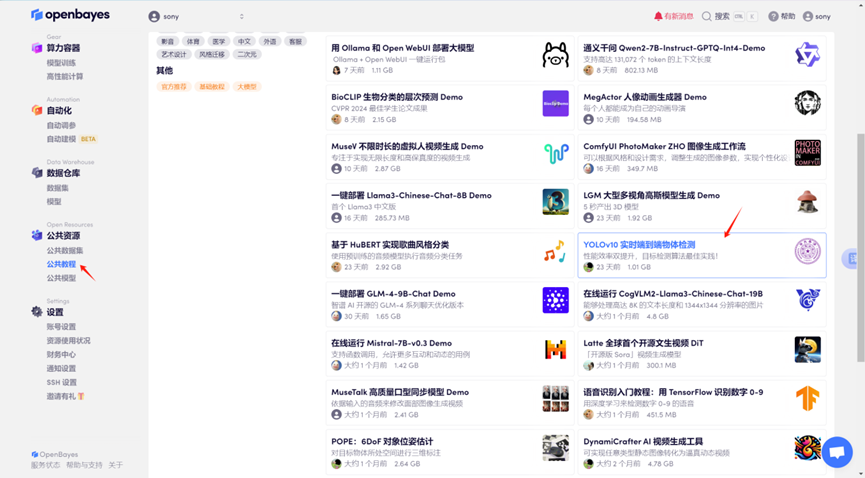
登录到 OpenBayes 平台后,点击「公共教程」,在公共教程中找到「YOLOv10 实时端到端物体检测」的教程。
点击「克隆」,将教程克隆到我们自己的容器内。
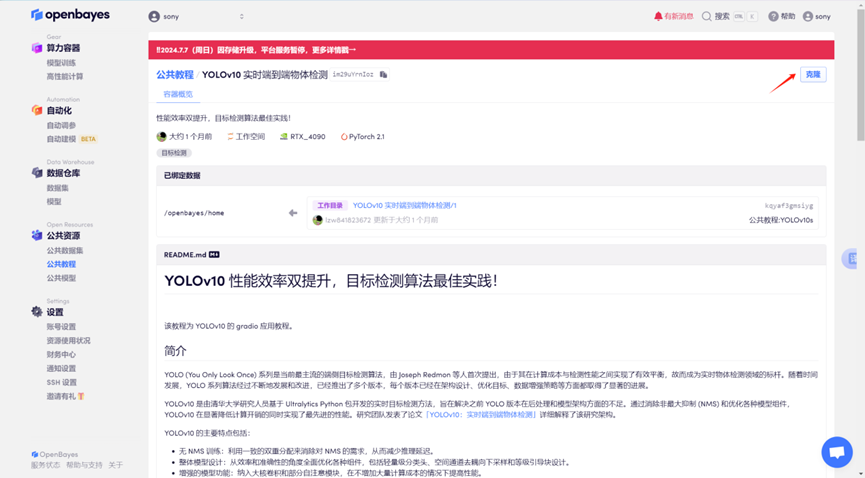
平台已经自动为容器绑定好了所需要的文件,我们点击「下一步:选择算力」。

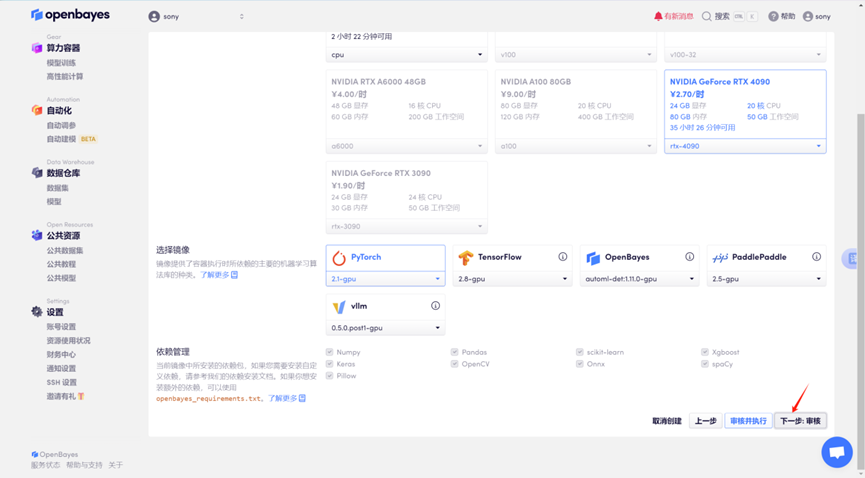
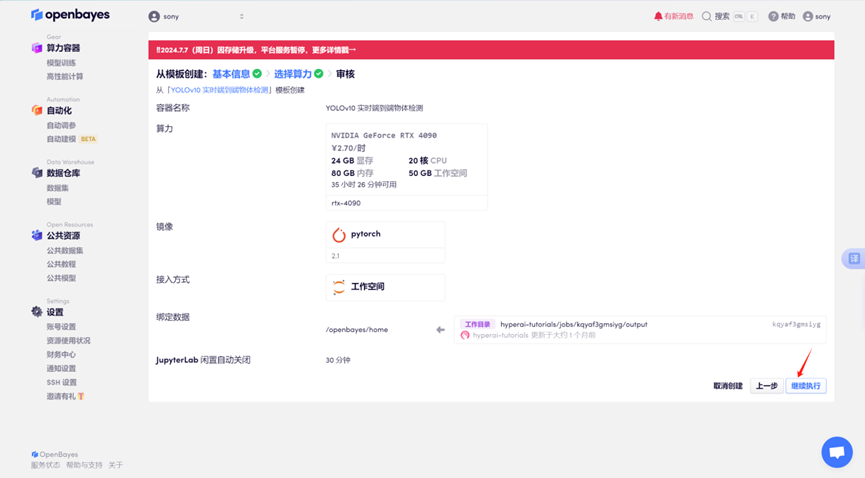
算力选择 4090,有免费的赠送时长,选择 PyTorch 镜像后,点击「下一步:审核」,「继续执行」。
等待系统分配资源完成后,打开 API 地址处的网址,进入该网址需要先完成实名认证。
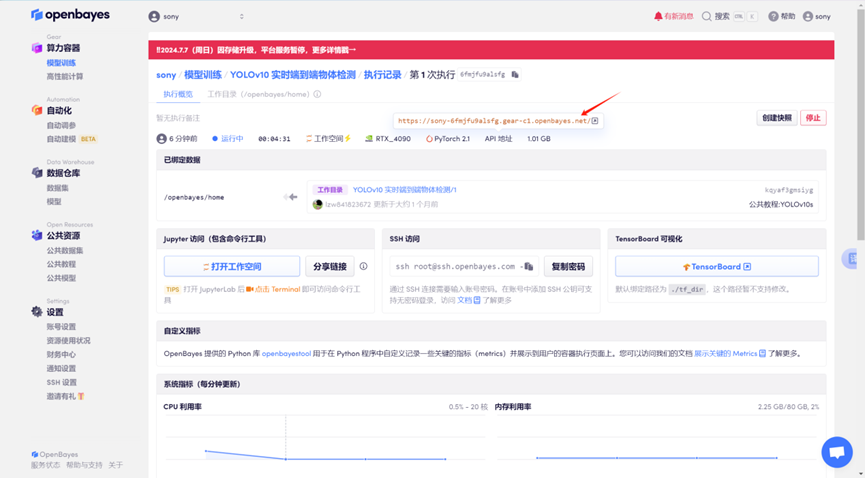
进入 Gradio 界面后就可以进行图片的上传和检测了。
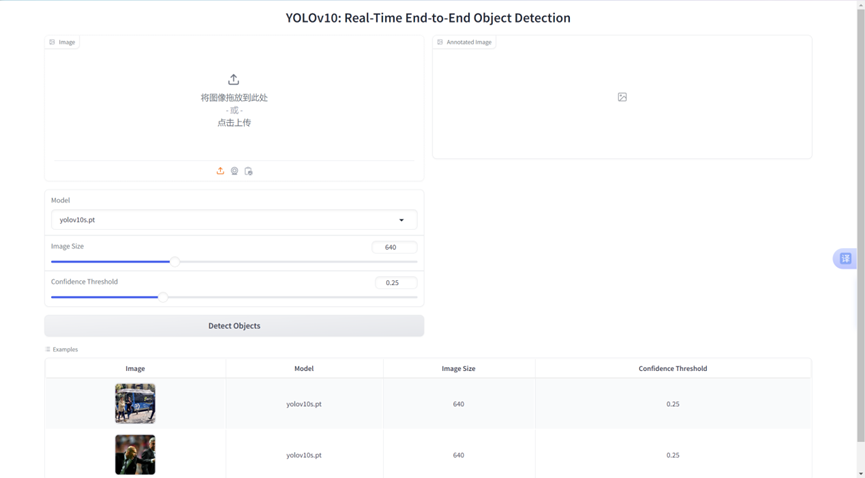
在 Model 处可以选择模型,每个模型的大小不一样,效果也不一样,我们一般使用 yolov10s.pt。
* Image Size 项可以调整输入图像的大小。
* Confidence Threshold 项可以调整置信度。
我们选择一个示例进行检测。

可以看到它将图片中的人物、汽车都检测了出来。















 3031
3031

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









