






透视变换的原理和矩阵求解请參见前一篇《透视变换 Perspective Transformation》。在OpenCV中也实现了透视变换的公式求解和变换函数。
求解变换公式的函数:
Mat getPerspectiveTransform(const Point2f src[], const Point2f dst[])void perspectiveTransform(InputArray src, OutputArray dst, InputArray m)int main( )
{
Mat img=imread("boy.png");
int img_height = img.rows;
int img_width = img.cols;
vector<Point2f> corners(4);
corners[0] = Point2f(0,0);
corners[1] = Point2f(img_width-1,0);
corners[2] = Point2f(0,img_height-1);
corners[3] = Point2f(img_width-1,img_height-1);
vector<Point2f> corners_trans(4);
corners_trans[0] = Point2f(150,250);
corners_trans[1] = Point2f(771,0);
corners_trans[2] = Point2f(0,img_height-1);
corners_trans[3] = Point2f(650,img_height-1);
Mat transform = getPerspectiveTransform(corners,corners_trans);
cout<<transform<<endl;
vector<Point2f> ponits, points_trans;
for(int i=0;i<img_height;i++){
for(int j=0;j<img_width;j++){
ponits.push_back(Point2f(j,i));
}
}
perspectiveTransform( ponits, points_trans, transform);
Mat img_trans = Mat::zeros(img_height,img_width,CV_8UC3);
int count = 0;
for(int i=0;i<img_height;i++){
uchar* p = img.ptr<uchar>(i);
for(int j=0;j<img_width;j++){
int y = points_trans[count].y;
int x = points_trans[count].x;
uchar* t = img_trans.ptr<uchar>(y);
t[x*3] = p[j*3];
t[x*3+1] = p[j*3+1];
t[x*3+2] = p[j*3+2];
count++;
}
}
imwrite("boy_trans.png",img_trans);
return 0;
}得到变换之后的图片:

注意这样的将原图变换到相应图像上的方式会有一些没有被填充的点。也就是右图中黑色的小点。
解决这样的问题一是用差值的方式。再一种比較简单就是不用原图的点变换后相应找新图的坐标,而是直接在新图上找反向变换原图的点。说起来有点绕口。详细见前一篇《透视变换 Perspective Transformation》的代码应该就能懂啦。
除了getPerspectiveTransform()函数。OpenCV还提供了findHomography()的函数,不是用点来找,而是直接用透视平面来找变换公式。
这个函数在特征匹配的经典样例中实用到,也非常直观:
int main( int argc, char** argv )
{
Mat img_object = imread( argv[1], IMREAD_GRAYSCALE );
Mat img_scene = imread( argv[2], IMREAD_GRAYSCALE );
if( !img_object.data || !img_scene.data )
{ std::cout<< " --(!) Error reading images " << std::endl; return -1; }
//-- Step 1: Detect the keypoints using SURF Detector
int minHessian = 400;
SurfFeatureDetector detector( minHessian );
std::vector<KeyPoint> keypoints_object, keypoints_scene;
detector.detect( img_object, keypoints_object );
detector.detect( img_scene, keypoints_scene );
//-- Step 2: Calculate descriptors (feature vectors)
SurfDescriptorExtractor extractor;
Mat descriptors_object, descriptors_scene;
extractor.compute( img_object, keypoints_object, descriptors_object );
extractor.compute( img_scene, keypoints_scene, descriptors_scene );
//-- Step 3: Matching descriptor vectors using FLANN matcher
FlannBasedMatcher matcher;
std::vector< DMatch > matches;
matcher.match( descriptors_object, descriptors_scene, matches );
double max_dist = 0; double min_dist = 100;
//-- Quick calculation of max and min distances between keypoints
for( int i = 0; i < descriptors_object.rows; i++ )
{ double dist = matches[i].distance;
if( dist < min_dist ) min_dist = dist;
if( dist > max_dist ) max_dist = dist;
}
printf("-- Max dist : %f \n", max_dist );
printf("-- Min dist : %f \n", min_dist );
//-- Draw only "good" matches (i.e. whose distance is less than 3*min_dist )
std::vector< DMatch > good_matches;
for( int i = 0; i < descriptors_object.rows; i++ )
{ if( matches[i].distance < 3*min_dist )
{ good_matches.push_back( matches[i]); }
}
Mat img_matches;
drawMatches( img_object, keypoints_object, img_scene, keypoints_scene,
good_matches, img_matches, Scalar::all(-1), Scalar::all(-1),
vector<char>(), DrawMatchesFlags::NOT_DRAW_SINGLE_POINTS );
//-- Localize the object from img_1 in img_2
std::vector<Point2f> obj;
std::vector<Point2f> scene;
for( size_t i = 0; i < good_matches.size(); i++ )
{
//-- Get the keypoints from the good matches
obj.push_back( keypoints_object[ good_matches[i].queryIdx ].pt );
scene.push_back( keypoints_scene[ good_matches[i].trainIdx ].pt );
}
Mat H = findHomography( obj, scene, RANSAC );
//-- Get the corners from the image_1 ( the object to be "detected" )
std::vector<Point2f> obj_corners(4);
obj_corners[0] = Point(0,0); obj_corners[1] = Point( img_object.cols, 0 );
obj_corners[2] = Point( img_object.cols, img_object.rows ); obj_corners[3] = Point( 0, img_object.rows );
std::vector<Point2f> scene_corners(4);
perspectiveTransform( obj_corners, scene_corners, H);
//-- Draw lines between the corners (the mapped object in the scene - image_2 )
Point2f offset( (float)img_object.cols, 0);
line( img_matches, scene_corners[0] + offset, scene_corners[1] + offset, Scalar(0, 255, 0), 4 );
line( img_matches, scene_corners[1] + offset, scene_corners[2] + offset, Scalar( 0, 255, 0), 4 );
line( img_matches, scene_corners[2] + offset, scene_corners[3] + offset, Scalar( 0, 255, 0), 4 );
line( img_matches, scene_corners[3] + offset, scene_corners[0] + offset, Scalar( 0, 255, 0), 4 );
//-- Show detected matches
imshow( "Good Matches & Object detection", img_matches );
waitKey(0);
return 0;
}代码执行效果:
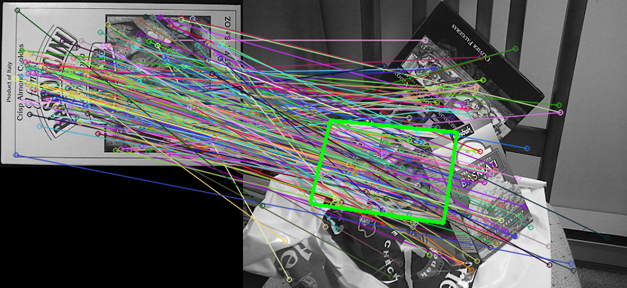
findHomography()函数直接通过两个平面上相匹配的特征点求出变换公式,之后代码又对原图的四个边缘点进行变换,在右图上画出相应的矩形。
这个图也非常好地解释了所谓透视变换的“Viewing Plane”。















 1322
1322

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









