






一、爬山算法简单描述
简介:爬山法是一种优化算法,其一般从一个随机的解开始,然后逐步找到一个最优解(局部最优)。假定所求问题有多个参数,我们在通过爬山法逐步获得最优解的过程中可以依次分别将某个参数的值增加或者减少一个单位。
思想:每次拿相邻点与当前点进行比对,取两者中较优者,作为爬坡的下一步。
主要用于:求解目标函数(机器学习的套路就是交给机器一堆数据,然后告诉它“目标函数”的学习方式是对的)
二、爬山算法的主要算法
实例:求解下面表达式的最大值,且假设x,y均按为0.1间隔递增。

pyhton画出该函数的图像:
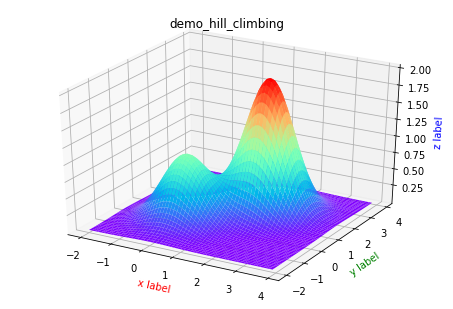
图像的python代码
# encoding:utf8
from matplotlib import pyplot as plt
import numpy as np
from mpl_toolkits.mplot3d import Axes3D
def func(X, Y, x_move=0, y_move=0):
def mul(X, Y, alis=1):
return alis * np.exp(-(X * X + Y * Y))
return mul(X, Y) + mul(X - x_move, Y - y_move, 2)
def show(X, Y):
fig = plt.figure()
ax = Axes3D(fig)
X, Y = np.meshgrid(X, Y)
Z = func(X, Y, 1.7, 1.7)
plt.title("demo_hill_climbing")
ax.plot_surface(X, Y, Z, rstride=1, cstride=1, cmap='rainbow', )
ax.set_xlabel('x label', color='r')
ax.set_ylabel('y label', color='g')
ax.set_zlabel('z label', color='b')
# 具体函数方法可用 help(function) 查看,如:help(ax.plot_surface)
# ax.scatter(X,Y,Z,c='r') #绘点
plt.show()
if __name__ == '__main__':
X = np.arange(-2, 4, 0.1)
Y = np.arange(-2, 4, 0.1)
show(X,Y)1.首选爬山算法(局部最优)
过程简介:
- 随机选择一个符合条件的解
- 按某一个间隔n递增
- 得出一个解集,找出解集中的最优解
- 将这个最优解依据上面的方法再构造一个解集,再求最优解
- 直到前一次的最优解和后一次的最优解相同才结束爬山
代码实现:
# encoding:utf8
from random import random, randint
from matplotlib import pyplot as plt
import numpy as np
from mpl_toolkits.mplot3d import Axes3D
def func(X, Y, x_move=1.7, y_move=1.7):
def mul(X, Y, alis=1):
return alis * np.exp(-(X * X + Y * Y))
return mul(X, Y) + mul(X - x_move, Y - y_move, 2)
def show(X, Y, Z):
fig = plt.figure()
ax = Axes3D(fig)
plt.title("demo_hill_climbing")
ax.plot_surface(X, Y, Z, rstride=1, cstride=1, cmap='rainbow', )
ax.set_xlabel('x label', color='r')
ax.set_ylabel('y label', color='g')
ax.set_zlabel('z label', color='b')
# ax.scatter(X,Y,Z,c='r') #绘点
plt.show()
def drawPaht(X, Y, Z,px,py,pz):
fig = plt.figure()
ax = Axes3D(fig)
plt.title("demo_hill_climbing")
ax.plot_surface(X, Y, Z, rstride=1, cstride=1, cmap='rainbow', )
ax.set_xlabel('x label', color='r')
ax.set_ylabel('y label', color='g')
ax.set_zlabel('z label', color='b')
ax.plot(px,py,pz,'r.') #绘点
plt.show()
def hill_climb(X, Y):
global_X = []
global_Y = []
len_x = len(X)
len_y = len(Y)
# 随机登山点
st_x = randint(0, len_x-1)
st_y = randint(0, len_y-1)
def argmax(stx, sty, alisx=0, alisy=0):
cur = func(X[0][st_x], Y[st_y][0])
next = func(X[0][st_x + alisx], Y[st_y + alisy][0])
return cur < next and True or False
while (len_x > st_x >= 0) or (len_y > st_y >= 0):
if st_x + 1 < len_x and argmax(st_x, st_y, 1):
st_x += 1
elif st_y + 1 < len_x and argmax(st_x, st_y, 0, 1):
st_y += 1
elif st_x >= 1 and argmax(st_x, st_y, -1):
st_x -= 1
elif st_y >= 1 and argmax(st_x, st_y, 0, -1):
st_y -= 1
else:
break
global_X.append(X[0][st_x])
global_Y.append(Y[st_y][0])
return global_X, global_Y, func(X[0][st_x], Y[st_y][0])
if __name__ == '__main__':
X = np.arange(-2, 4, 0.1)
Y = np.arange(-2, 4, 0.1)
X, Y = np.meshgrid(X, Y)
Z = func(X, Y, 1.7, 1.7)
px, py, maxhill = hill_climb(X, Y)
print (px,py,maxhill)
drawPaht(X, Y, Z,px,py,func(np.array(px), np.array(py), 1.7, 1.7)对比几次运行结果:
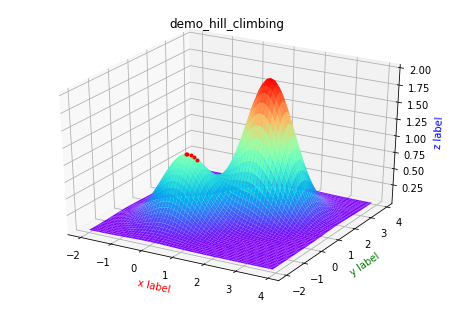
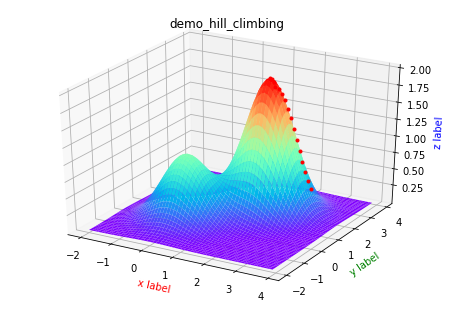
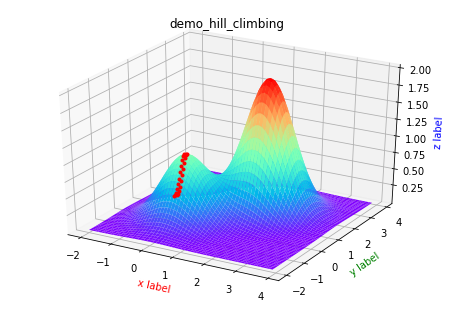
从上图中,我们可以比较清楚的观察到,首选爬山算法的缺陷:
- 因为只对“邻近”的点作比较,所以目光比较“短浅”,常常只能收敛到离开初始位置比较近的局部最优解上面。对于存在很多局部最优点的问题,通过一个简单的迭代找出全局最优解的机会非常渺茫。
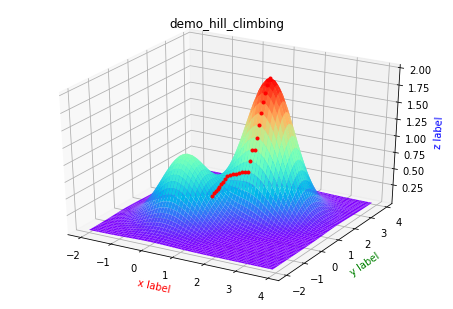
2.最陡爬山算法(局部最优)
描述:最陡爬山算法是在首选爬山算法上的一种改良,它规定每次选取邻近点价值最大的那个点作为爬上的点。
代码实现:
# encoding:utf8
from random import random, randint
from matplotlib import pyplot as plt
import numpy as np
from mpl_toolkits.mplot3d import Axes3D
def func(X, Y, x_move=1.7, y_move=1.7):
def mul(X, Y, alis=1):
return alis * np.exp(-(X * X + Y * Y))
return mul(X, Y) + mul(X - x_move, Y - y_move, 2)
def show(X, Y, Z):
fig = plt.figure()
ax = Axes3D(fig)
plt.title("demo_hill_climbing")
ax.plot_surface(X, Y, Z, rstride=1, cstride=1, cmap='rainbow', )
ax.set_xlabel('x label', color='r')
ax.set_ylabel('y label', color='g')
ax.set_zlabel('z label', color='b')
# ax.scatter(X,Y,Z,c='r') #绘点
plt.show()
def drawPaht(X, Y, Z, px, py, pz):
fig = plt.figure()
ax = Axes3D(fig)
plt.title("demo_hill_climbing")
ax.plot_surface(X, Y, Z, rstride=1, cstride=1, cmap='rainbow', )
ax.set_xlabel('x label', color='r')
ax.set_ylabel('y label', color='g')
ax.set_zlabel('z label', color='b')
ax.plot(px, py, pz, 'r.') # 绘点
plt.show()
def hill_climb(X, Y):
global_X = []
global_Y = []
len_x = len(X)
len_y = len(Y)
# 随机登山点
st_x = randint(0, len_x - 1)
st_y = randint(0, len_y - 1)
def argmax(stx, sty, alisx, alisy):
cur = func(X[0][stx], Y[sty][0])
next = func(X[0][alisx], Y[alisy][0])
if cur < next:
return alisx, alisy
return stx, sty
#return cur < next and alisx, alisy or stx, sty
tmp_x = st_x
tmp_y = st_y
while (len_x > st_x >= 0) or (len_y > st_y >= 0):
if st_x + 1 < len_x:
tmp_x, tmp_y = argmax(tmp_x, tmp_y, (st_x + 1), st_y)
if st_x >= 1:
tmp_x, tmp_y = argmax(tmp_x, tmp_y, st_x - 1, st_y)
if st_y + 1 < len_x:
tmp_x, tmp_y = argmax(tmp_x, tmp_y, st_x, st_y + 1)
if st_y >= 1:
tmp_x, tmp_y = argmax(tmp_x, tmp_y, st_x, st_y - 1)
if tmp_x != st_x or tmp_y != st_y:
st_x = tmp_x
st_y = tmp_y
else:
break
global_X.append(X[0][st_x])
global_Y.append(Y[st_y][0])
return global_X, global_Y, func(X[0][st_x], Y[st_y][0])
if __name__ == '__main__':
X = np.arange(-2, 4, 0.1)
Y = np.arange(-2, 4, 0.1)
X, Y = np.meshgrid(X, Y)
Z = func(X, Y, 1.7, 1.7)
px, py, maxhill = hill_climb(X, Y)
print(px, py, maxhill)
drawPaht(X, Y, Z, px, py, func(np.array(px), np.array(py), 1.7, 1.7))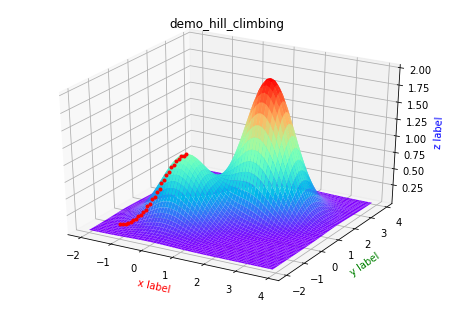
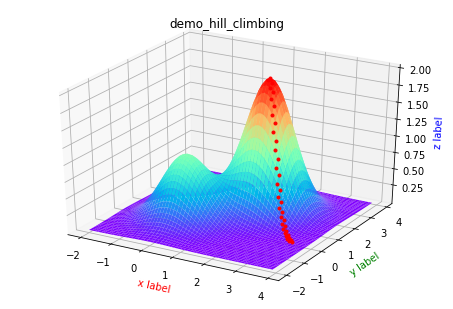
从这个结果来看,因为范围扩大了一点,所以效果会好一点点。
3.随机重新开始爬山算法(全局最优)
描述:随机重新开始爬山算法是基于最陡爬山算法,其实就是加一个达到全局最优解的条件。如果满足该条件,就结束运算;反之则无限次重复运算最陡爬山算法。
由于此题,并没有结束的特征条件,我们这里就不给予实现。
4.模拟退火算法(全局最优)















 1373
1373











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









