






均值滤波(Mean Filtering)是最基础的图像平滑技术之一,广泛应用于去除高斯噪声、预处理低质量图像等场景。作为线性滤波器的代表,其核心思想是通过局部平均实现噪声抑制。本文将深入解析均值滤波的数学原理,对比手动实现与OpenCV的高效方法,并通过实验结果直观展示其效果。
1. 均值滤波的原理
(1) 基本概念
- 功能:通过用邻域像素的平均值替代中心像素值,降低局部区域的强度变化。
- 适用噪声:高斯噪声、均匀分布噪声。
- 副作用:导致图像边缘模糊,细节丢失。
(2) 数学表达式
以3×3滤波核为例,中心像素的新值为周围9个像素的算术平均:

对于一般化的k×k核,归一化系数为1/(k×k),确保图像整体亮度不变。
(3) 核函数可视化
3x3均值滤波核矩阵:
[[0.111, 0.111, 0.111],
[0.111, 0.111, 0.111],
[0.111, 0.111, 0.111]]2. 手动实现均值滤波
(2.1) 基础实现代码
通过双重循环遍历每个像素并计算邻域均值:
import cv2
import numpy as np
def mean_filter_manual(image, kernel_size=3):
h, w = image.shape[:2]
offset = kernel_size // 2
filtered = np.zeros_like(image)
# 遍历图像的每个像素
for y in range(h):
for x in range(w):
# 计算邻域的边界
y_start = max(0, y - offset)
y_end = min(h, y + offset + 1)
x_start = max(0, x - offset)
x_end = min(w, x + offset + 1)
# 提取邻域
region = image[y_start:y_end, x_start:x_end]
# 计算邻域的均值
filtered[y, x] = np.mean(region, axis=(0, 1))
return filtered.astype(np.uint8)
# 读取图像
img = cv2.imread('2.jpg')
if img is None:
print("无法读取图像,请检查图像路径和文件名。")
else:
# 添加高斯噪声
noise = np.random.normal(0, 30, img.shape).astype(np.float32)
noisy_img = np.clip(img + noise, 0, 255).astype(np.uint8)
# 应用3x3均值滤波
filtered_manual = mean_filter_manual(noisy_img)
# 显示结果
cv2.imshow("noisy_img", noisy_img)
cv2.imshow("Mean Filtered Image", filtered_manual)
cv2.waitKey(0)
cv2.destroyAllWindows()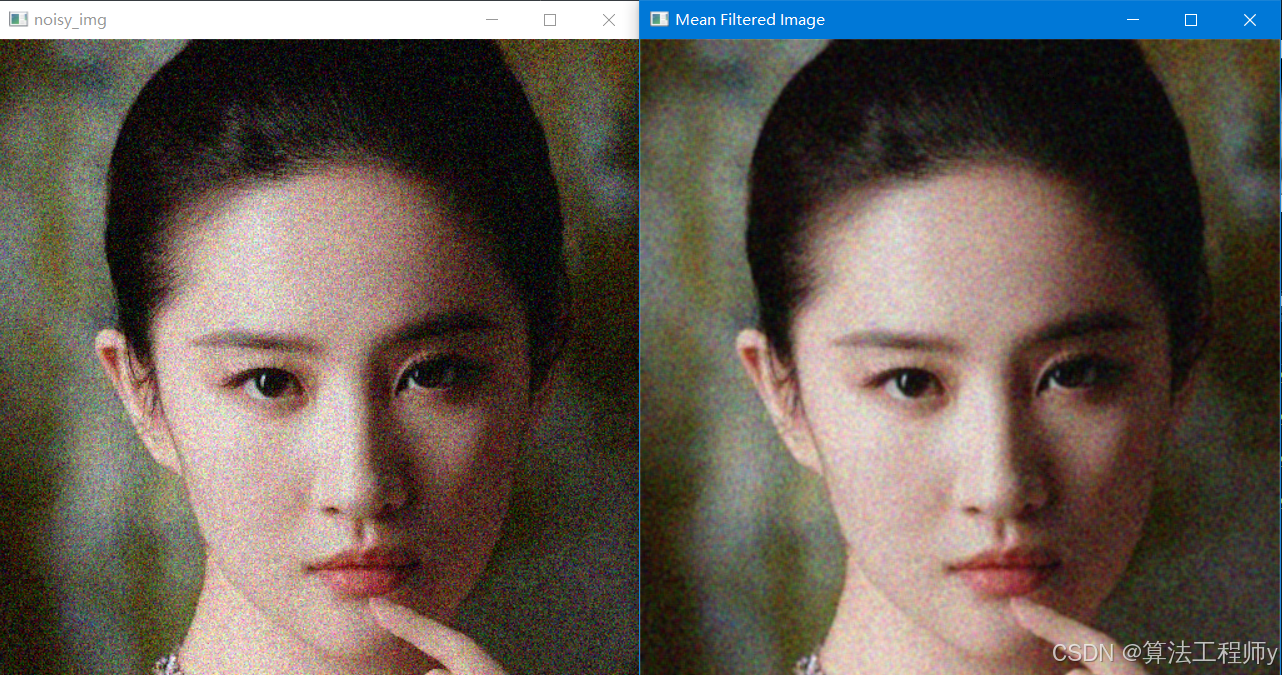
3. OpenCV高效实现
OpenCV提供的cv2.blur()函数采用硬件优化,处理速度比手动实现快数十倍。
import cv2
import numpy as np
# 读取图像
image_path = '2.jpg'
image = cv2.imread(image_path)
# 检查图像是否成功读取
if image is None:
print("无法读取图像,请检查图像路径和文件名。")
else:
# 添加高斯噪声
noise = np.random.normal(0, 30, image.shape).astype(np.float32)
noisy_image = np.clip(image + noise, 0, 255).astype(np.uint8)
# 使用3x3滤波核进行均值滤波
filtered_image = cv2.blur(noisy_image, (3, 3))
# 显示滤波后的图像
cv2.imshow("Filtered Image", filtered_image)
# 等待按键事件
cv2.waitKey(0)
# 释放所有窗口
cv2.destroyAllWindows()关键参数解析
| 参数 | 描述 | 示例 |
|---|---|---|
ksize | 滤波核尺寸(宽度, 高度) | (3,3) |
anchor | 锚点位置(默认中心点(-1,-1)) | (0,0) |
borderType | 边界处理方式 | BORDER_DEFAULT |
4. 滤波效果对比分析
(4.1) 不同滤波核尺寸的影响
| 核尺寸 | 去噪效果 | 模糊程度 | |
|---|---|---|---|
| 3x3 | 弱 | 轻微边缘模糊 | |
| 5x5 | 中等 | 明显模糊 | |
| 9x9 | 强 | 严重细节丢失 |
(4.2) 不同噪声类型的处理效果
- 高斯噪声:均值滤波效果显著,信噪比(SNR)提升约10 dB。
- 椒盐噪声:几乎无效,反而可能扩散噪声点(需改用中值滤波)。
- 泊松噪声:有一定抑制作用,但不如非局部均值等高级方法。
5. 应用场景与局限性
| 场景 | 优势 | 缺陷 |
|---|---|---|
| 监控视频去噪 | 实时性好 | 运动物体边缘模糊 |
| 医学图像预处理 | 平滑组织纹理 | 丢失微小病灶细节 |
| 老照片修复 | 减少划痕与颗粒感 | 低频噪声残留较多 |

















 617
617

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









