







电机电感或更合适的“电气时间常数”值会以多种方式影响伺服驱动器。虽然高电感值可能限制系统带宽,但低电感值可能导致控制环路不稳定性,电流读数不准确,功率损耗增加和其他问题。这些问题在具有非常低的摩擦和高动态的高速有刷电机中尤其关键。
低电感电机注意
低电感电机可能无法与通用的伺服驱动器工作,或者可能需要硬件/固件修改才能正常运行。如果驱动器合适,请务必用电感计算工具来检测。
有刷直流电机的此类问题更为严重。
本文重点介绍了高和低电机电感值对整个伺服驱动系统的主要影响。
1、低电感电机的使用,提示和技巧
1.1 降低电源电压
尽可能减小电源电压可以按比例降低电流纹波,并允许驱动器工作在较低的电感值。
这是减少电流纹波,电磁干扰和开关损耗的第一个简单方法,但在某些情况下可能不适用,因为最大电机速度将受到反电动势的限制。
1.2 增加机械摩擦或带载测试电机
这将增加最小工作直流电流,并防止进入“反向电流”不稳定区。参见下面的理论来了解ADC采样问题和表观电流反向。在许多应用中,电机在带载情况下稳定,而空载不稳定。
1.3 更改驱动器的PWM频率
大多数IMC驱动器有两种可能的工作PWM频率。这可以使用寄存器更改:
EMCL(嵌入式运动控制库)的0x2020(使用MotionLab注册表观察器更改它)
1.4 禁用系统的电流/转矩环
这个显而易见的疯狂解决方案适用于电流或转矩不是相关参数的小电机。旁路电流控制回路可防止由于电机的快速电气特性引起的不必要的不稳定。控制回路只是基于位置和速度。
禁用电流环的主要缺点是没有i2t或电流限制算法将工作。在过载的情况下,将会发生故障(错误)而停机,而不是电流环有效时更理想的电流限制。请注意,这种操作模式与自动调试不兼容,并且由于负载变化可能会导致过流错误,因此可靠性较差。
1.5 添加与电机相串联的外部电感
与每个电机相串联增加一个电感来解决问题。
a. 为应用计算最小电感
IMC在其手册中提供最大电压下的最小电机电感。这是一个指示性的最坏情况的参数。在某些情况下,仅使用较低电压的驱动器或具有高摩擦力或机械负载的系统,也可以正常使用驱动器(甚至低于产品手册中所示的电感)。
计算最小电感。涉及的主要参数有:
· PWM频率
· 工作直流母线电压
· 最小额定电机电流
给定驱动器的推荐最小电机电感为:
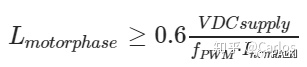
其中fPWM是驱动器的PWM频率(Hz)。它是可以在2个范围之间配置的参数(参见手册)。
Inominal是电机的典型工作电流(A)。
VDCsupply为电源电压(V)。
b. 最小电感计算器
已经开发了一种用于估计每个伺服驱动器的最小电感的工具。这是一个将被升级的初步工具。
Minimum inductance calculator
如果您没有电机电流:
Motor inductance measurement using afunction generator
2、为低电感电机设计的驱动器
像PNEP这样的驱动器可以处理低电感电机并控制电流环。以下规格提高了驱动器使用低电感电机运行的能力。
2.1 高PWM频率
大多数驱动器的PWM频率在20kHz或40kHz之间。具有高达200kHz频率的驱动器是可行的,并且可以减少电流纹波。PNEP工作在80kHz。
线性驱动器可实现最佳性能(∞ PWM频率)。
这些驱动器应具有在相电流检测,因为传统的低端电流检测方案需要最小的稳定时间。
a. 电流检测在相(带低通滤波器)
如果电流测量是在相上进行的,则模拟滤波可以降低平均电流检测误差。然而,大多数系统具有低侧电流检测,并且不允许积极的低通滤波器。
解决方案要求:
· 具有优异CMRR(PNEP)的隔离或差动电流传感器。
· 低通滤波器,具有良好的高频特性,可以抑制电流噪声。(数字或模拟)。
具有高频电流采样的模拟和数字低通滤波器的组合将提供最佳性能。
3、了解低电感电机的影响
3.1 电机电气模型
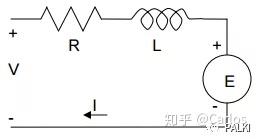
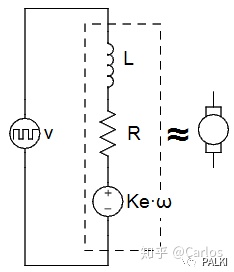
电机可以用可用于计算所需电压的等效电路进行建模(对于多相电机,该电路将是单相表示):
电阻R由于用于产生绕组的铜线,电感L是由于主电路和次级电路形成的磁路,并且受到绕组和磁芯结构的很大影响。电压E(反电动势电压)是由二次电路的感应电压引起的,与磁场变化(与电机转速有关)成正比。在步进电机和无刷永磁电机的情况下,反电动势(电动力)是由于转子上的磁体。在有刷直流电机的情况下,是由于定子或励磁绕组上的永磁体。
这是基于众所周知的电气元件(如电感器和电阻器)的简化模型。在现实的情况是比较复杂的,只能采用先进电磁仿真来理解。
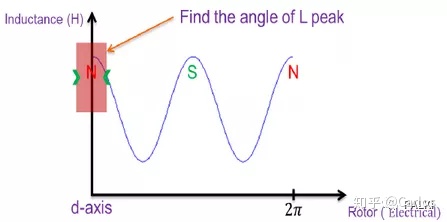
顺便说一句,根据转子构造方法(表面安装永磁体或内部永磁体),电感不会一直保持不变,这取决于转子的位置和定子与转子的结构。
由于磁性材料的相对磁导率远低于周围的铁,因此流过磁体的磁通的磁阻差大于铁路的磁阻。随着转子的角度前进,磁阻具有周期性变化。如果在定子的线圈上测量电感,它将如下所示:
3.2 电机电感对伺服驱动器的影响
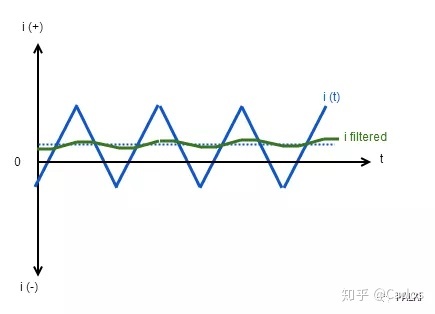
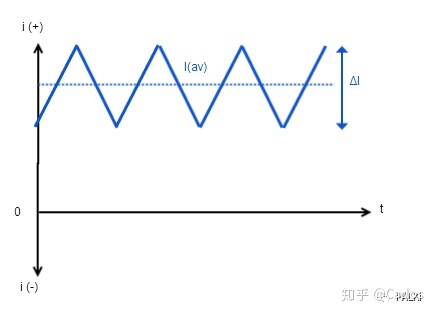
a. 电流纹波
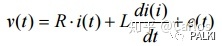
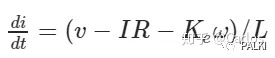
电机的电气方程由下式给出:

这里:
v是电机施加的电压(由驱动器产生)
L是电机的相电感(H)
di/dt是电流变化率(A/s)
R是电机的相电阻(Ω)
I是通过电机的电流(A)
Ke 是电机电压常数(v/RPM)
ω 是电机的转速(RPM)
电流随时间的变化可以表示为:
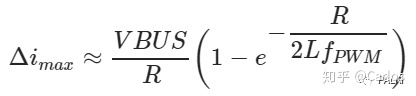
PWM调制驱动器中的最大波动是以最小的I·R乘积和零电机速度获得的。假定电机电压等于VBUS电压。因此,求解微分方程并使用系统值。
(1)

然后:
(2)
下图显示了简化的图形表示:
参数
名称
对电流纹波的影响和结论
L
电机相电感
低电感电机会导致更高的电流纹波。
f PWM
PWM频率
低PWM频率意味着更高的纹波,增加PWM会降低电流纹波。通常,IMC伺服驱动器的PWM频率为20kHz或40kHz,请参考数据表或HW配置文件的精确值。
线性伺服驱动器将具有“无限”PWM频率,因此具有零纹波。
VBUS
直流母线电压
高直流总线电压意味着更高的纹波,尽可能将直流总线电压降低到电机额定值。
R
电机相电阻
低电阻电机具有较低的电流纹波。
b. 电流检测误差(意外的电流反相和不可控电流回路)
具有高电流纹波通常意味着较差的电流读数。假设电流检测与PWM频率同步执行,根据测量时间,可以预期大的电流检测误差。当平均正电流流过电机时,可以测量负电流!在低电机电流下,问题可能导致严重的电流环不稳定!
根据经验,基本的稳定性标准是电机的“空载电流”应大于预期的波动。
(3)

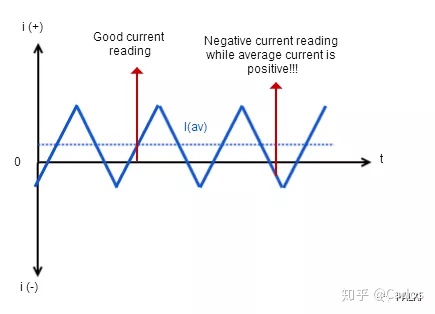
注意!
在低负载时,由于电流纹波,正电机电流可以读为负。这导致不稳定的电流环路变得不可控!
调试电机时,调试过程中转矩的异常反转可表示低电感。基本上平均(有用的)电流可能具有正值,但由于采样问题,它被读为负数。这使得调试不可能和不稳定。在这种情况下,需要采取纠正措施。
c. 扭矩波动
由于电流纹波,可以预期在PWM频率下的转矩脉动。虽然机械系统可以过滤这种纹波,但PWM频率下的这种转矩在高精度定位系统中是至关重要的。
磁芯饱和度和寄生效应也会恶化具有高电流纹波的转矩性能。
d. 功率损失
电机和功率级取决于RMS电流。高电流纹波导致高RMS电流,却没增加有效转矩。
(4)

(5)
e. 电磁干扰
高纹波意味着更高的传导和辐射电磁干扰。具有较大的电流纹波电机电缆将产生更大的EMI。通过电源电缆传导的EMI也将依赖于电感电流对作最低估计,直流母线中可能需要的大体积电容器。
3.3 控制环效应
电感,最大可达电流环带宽和电源电压之间存在关系。
由电源施加的电压分为三个部分:电阻,电感和反电动势。
(6)

如果我们假设正弦电流,如:
(7)

电感中所需的电压将为:
(8)

在高电流频率下,反电动势可以认为几乎为零,因为机械时间常数比电气时间常数高一些。
因此,电源上所需的电压可以表示为:
(9)

如果电源电压低于此值,电流环将进入饱和区,所产生的电流发生畸变和衰减。
4、未来的工作
4.1 模拟功率放大器 - 无PWM
模拟放大器为低电感电机提供最佳性能,但具有功率损耗剧增的缺点。这是低功耗和低电感电机或压电执行器的推荐解决方案。
4.2 板载LC滤波器
增加板载电感是一些驱动器的常见解决方案。然而,在许多情况下,它不是必需的,并且增加尺寸/成本和功率损耗。
一个漂亮的替代方案是有一个D类放大器,而不是每相典型的半桥。
4.3 多级功率级
作为大功率 - 低电感电机的未来方法。可以研究多级功率级以减少电压阶跃,从而减小电流纹波。参考学术文档:http://pe.org.pl/articles/2012/5b/3.pdf

















 3957
3957

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









