






Track-To-Track Fusion Versus Central-Level Tracking
A multiple sensor tracking system can provide better performance than a single sensor
system because it can provide broader coverage and better visibility. Moreover, fusing
detections from different types of sensors can also improve the quality and accuracy of
the target estimates. Two types of architecture are commonly used in a multiple sensor
tracking system. In the first type of architecture — central-level tracking — the
detections from all the sensors are sent directly to a tracking system that maintains
tracks based on all the detections. Theoretically, the central-level tracking
architecture can achieve the best performance because it can fully use all the
information contained in the detections. However, you can also apply a hierarchical
structure with sensor-level tracking combined with track-level fusion for a multiple
sensor system. The figure shows a typical central-level tracking system and a typical
track-to-track fusion system based on sensor-level tracking and track-level fusion.
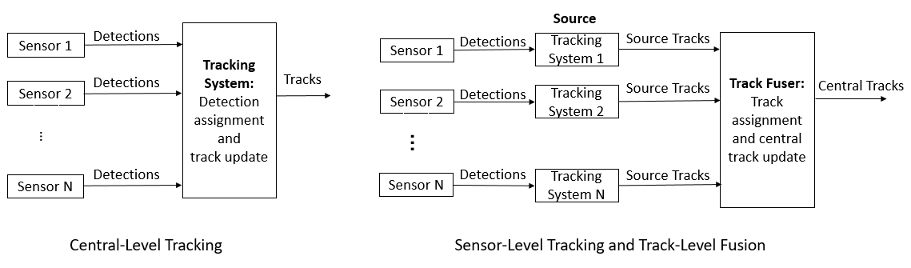
To represent each element in a track-to-track fusion system, call tracking systems
that output tracks to a fuser as sources, and call the outputted tracks from sources as
source tracks or local tracks. Call the tracks maintained in the fuser as central
tracks.















 475
475











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









