







简介:Code Composer Studio (CCS) 是德州仪器(TI)推出的集成开发环境,专注于MSP430系列微控制器的嵌入式应用开发。本指南提供了CCS v6.1版本在MSP430开发中的详细指导,包括开发工具链的使用、项目创建与管理、编程与编译过程、调试技巧,以及如何利用MSP430的低功耗模式和外设接口等特定功能。文档还涉及高级主题,如RTOS集成和多线程编程,旨在帮助开发者提升专业技能,高效开发嵌入式系统。 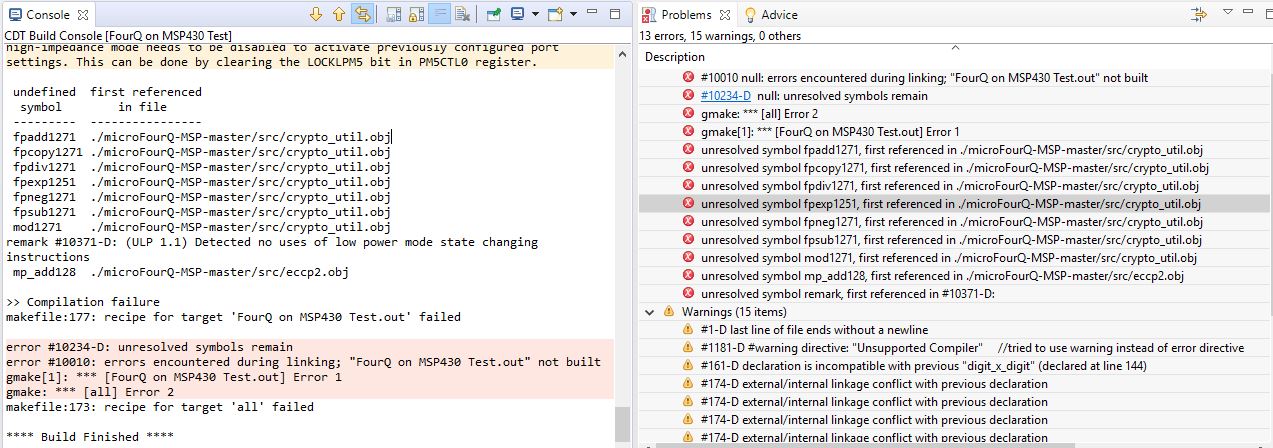
1. Code Composer Studio集成开发环境概览
1.1 开发环境简介
Code Composer Studio(CCS)是德州仪器(Texas Instruments,简称TI)推出的一款集成开发环境(IDE),它主要面向TI的微控制器(MCU)和数字信号处理器(DSP)等嵌入式系统设计。CCS为开发者提供了一套完整的工具集,涵盖了代码编写、调试、性能分析等软件开发生命周期的各个方面。
1.2 CCS功能特点
CCS集成了许多高效工具以加速开发过程。这些工具包括但不限于代码编辑器、编译器、调试器、模拟器以及代码剖析工具等。对于开发者来说,CCS的一大吸引力是其高度的定制化和可扩展性,可以根据不同的开发需求和项目规模进行灵活配置。
1.3 开发环境安装与配置
安装CCS相对简单,用户可以在TI官网下载对应版本的安装包,根据向导完成安装。安装完毕后,需要配置开发板和相应的驱动程序,以确保开发环境能够与硬件顺畅通信。在配置过程中,需要注意选择正确的设备型号和工具链版本,以匹配目标硬件的特定要求。
1.4 小结
本章节我们概览了Code Composer Studio集成开发环境,为后续章节中对MSP430微控制器的开发和优化奠定了基础。下一章我们将深入探讨MSP430微控制器的架构及其低功耗模式的设计理念。
2. MSP430系列微控制器开发基础
2.1 MSP430微控制器架构解析
2.1.1 核心组件介绍
MSP430系列微控制器是由德州仪器(Texas Instruments,简称TI)推出的一系列低功耗微控制器。该系列微控制器广泛应用于各种电池供电的便携式设备和智能传感器中。其核心组件包括:
-
CPU:MSP430采用的是16位RISC架构的CPU,使得指令周期缩短,提高了运行效率。它支持C语言等高级语言进行编程,简化开发过程。
-
存储器:具有易失性的RAM和非易失性的Flash存储器,用于程序存储和数据存储。
-
低功耗模式:MSP430微控制器设计的核心之一是其超低功耗模式。包括活动模式(AM)、低功耗模式(LPM0-LPM3)等,让设备能在不同功耗需求下工作。
-
外设接口:包括通用输入输出GPIO、定时器、串行通信接口如UART、SPI和I2C等,提供丰富的外设控制能力。
2.1.2 低功耗模式设计哲学
MSP430微控制器的低功耗设计哲学是其最大的特点之一,设计者在硬件设计和软件支持方面都围绕这一目标进行。
-
在硬件方面,MSP430使用了独特的电源管理系统,能够灵活控制各种外设的功耗,同时采用特殊的时钟系统,减少在非活动期间的时钟消耗。
-
在软件方面,提供API支持,使得开发者可以轻松地根据需要切换不同的低功耗模式,并且能够在低功耗状态下响应中断事件,快速恢复到活动模式。
为了深入理解MSP430的低功耗设计,我们需要关注以下几个方面:
- 动态电源管理技术(DVFS),通过调整CPU电压和频率来控制功耗。
- 中断驱动的唤醒机制,确保微控制器在无任务执行时处于最低功耗状态。
- 外设的选择性关闭和动态关闭,允许对特定外设进行功耗控制。
2.2 MSP430应用开发准备
2.2.1 硬件平台选择和配置
为了开始MSP430系列微控制器的开发,我们需要准备相应的硬件平台。TI提供了多种开发板和目标板,以满足不同开发者的需要。
-
MSP-EXP430F5529LP开发板是一款功能全面的入门级开发板,集成了多种外设,例如USB、LCD显示、按键和扩展接口等。
-
MSP-TS430RGZ48B目标调试板提供了方便的调试和编程接口,支持48脚的MSP430微控制器。
在选择硬件平台时,应该考虑以下因素:
- 目标应用的性能需求
- 开发板提供的外设接口是否满足设计需求
- 开发板的易用性和文档支持
配置硬件平台通常包括以下步骤:
- 连接电源和调试器
- 根据应用需求连接外设
- 通过Code Composer Studio(CCS)进行初始化设置
2.2.2 开发工具链和资源获取
MSP430开发工具链以Code Composer Studio(CCS)为核心,它提供了一个集成的开发环境,其中包括编译器、调试器、代码编辑器和项目管理工具。
-
CCS可以从TI官网免费下载,适用于Windows、Mac和Linux操作系统。
-
CCS集成了必要的驱动程序和软件库,提供了丰富的API支持。
-
TI还提供了丰富的开发资源,包括应用笔记、示例代码和开发指南等。
-
开发者社区和论坛提供了一个交流的平台,开发者可以在这里找到解决方案,互相学习和分享经验。
要获取这些工具和资源,开发者需要:
- 访问德州仪器官网或使用TI Resource Explorer下载软件和文档。
- 注册并加入TI开发者社区,以获取更多的帮助和支持。
- 探索和下载Code Composer Studio的最新版本,确保拥有最新的功能和补丁。
准备好硬件和软件资源之后,开发者就可以开始他们的MSP430项目开发之旅了。在下一部分,我们将深入了解CCS开发环境,并探索如何有效地使用它进行开发工作。
3.1 CCS开发工具链详解
3.1.1 工具链组件和功能
Code Composer Studio (CCS) 是德州仪器(Texas Instruments, TI)推出的一款针对其微控制器系列(例如MSP430、TMS320C6000 DSP、ARM Cortex-M等)的集成开发环境(IDE)。CCS提供了一套完整的工具链,让开发者能够在同一个平台上进行代码编辑、编译、调试和性能分析。
工具链的核心组件包括:
- Eclipse-based IDE: CCS基于Eclipse框架构建,这意味着它享受着Eclipse强大的插件生态系统支持。开发者可以通过安装不同的插件来扩展IDE的功能。
- 编译器: CCS提供优化的编译器,能够产生高效的可执行文件。不同的微控制器系列使用各自专门的编译器,比如MSP430系列使用MSP430编译器。
- 调试器: CCS的调试器允许开发者在代码中设置断点,单步执行代码,并观察寄存器和内存的变化。
- 性能分析器: 性能分析器工具可以分析程序的性能瓶颈,如CPU使用率、内存分配和功耗等。
- 配置器: 这些工具允许开发者配置微控制器的硬件设置,如时钟系统、GPIO以及中断等。
除了上述核心组件,CCS还包括项目管理器、版本控制集成、软件版本更新器以及许多其他辅助工具和插件,使得整个开发过程更加便捷高效。
3.1.2 工具链集成和配置流程
CCS的工具链集成和配置流程需要遵循一系列步骤,以确保开发环境正确设置并能针对特定项目进行优化。
-
安装和启动: 首先,从TI官方网站下载CCS安装包,完成安装后启动CCS。首次启动时,可以选择创建新项目或打开现有项目。
-
配置工具链组件: 在项目中,根据所使用的微控制器型号,安装相应的编译器和调试器组件。可以通过“Help”菜单下的“Install New Software…”选项来访问额外的组件和更新。
-
项目设置: 创建新项目时,需要选择正确的项目类型和微控制器家族,这将自动配置项目设置,包括正确的编译器和链接器选项。
-
导入外部代码: 若有现成的源代码或库文件,可以通过“File”菜单中的“Import”功能将它们导入到项目中。
-
配置编译和链接器选项: 为优化项目性能,需要调整编译器和链接器的设置。这可以通过项目属性(Project Properties)中的“C/C++ Build”选项卡来完成。
-
设置调试配置: 在调试之前,设置正确的调试配置是至关重要的。这包括指定目标设备、调试接口和连接速度等。
-
编写和编译代码: 开始编写代码,然后利用提供的编译工具链来编译代码。任何编译错误都会在“Problems”视图中列出,方便开发者快速定位和修复。
-
运行和调试: 使用调试器运行代码,设置断点,单步执行,并观察变量的变化。利用性能分析器来识别程序瓶颈。
通过上述步骤,开发者可以有效地集成和配置CCS开发工具链,开始针对特定目标微控制器的开发工作。
3.2 CCS用户界面和编程语言支持
3.2.1 界面布局和定制
Code Composer Studio的用户界面设计采用模块化布局,使得用户可以定制一个高效的工作环境。界面布局通常包括以下主要部分:
- 项目浏览器: 用于展示当前工作空间中的所有项目和文件。
- 编辑器: 用于查看和编辑代码文件。
- 调试视图: 包括变量视图、断点视图和执行控制按钮等,这些都为代码调试提供了极大的便利。
- 控制台: 显示编译输出、错误信息以及任何调试信息。
- 大纲视图: 显示当前编辑器文件的结构,帮助开发者快速定位到代码的特定部分。
CCS提供了多种方式来定制界面布局:
- 视图调整: 用户可以通过拖放视图来改变它们的大小和位置,或者将它们移动到不同的窗口区域。
- 透视图切换: 在Eclipse的视角概念下,用户可以切换到不同的预设视图布局,例如调试透视图(Debug Perspective)和编辑透视图(Editing Perspective)。
- 工具栏和菜单定制: 可以向工具栏添加常用的按钮,或者从菜单中删除不需要的项。
- 窗口偏好设置: 在“Window”菜单下的“Preferences”选项可以对编辑器的颜色主题、字体大小以及其他视觉辅助功能进行调整。
3.2.2 编程语言特性及支持
CCS支持多种编程语言,包括但不限于C和C++。针对嵌入式系统,C语言是开发的主流语言,而CCS提供了对其完整的支持。C++的使用也越来越普遍,尤其是在需要面向对象编程和复杂数据结构的应用场景中。
编程语言的特性支持包括:
- 语法高亮: 对不同编程语言提供语法高亮显示,以提高代码的可读性。
- 代码助手: 在编写代码时提供代码自动完成功能,包括智能提示和代码片段。
- 代码格式化: 提供代码格式化功能,帮助开发者统一代码风格。
- 代码交叉引用: 能够追踪变量和函数的定义以及它们在代码中的所有引用。
- 模板和代码生成: 提供代码模板和代码片段生成器,快速生成特定代码结构。
- 编译器支持: 集成了专门针对TI微控制器的优化编译器,支持标准C99和C++11特性。
CCS还包括对TI特定硬件扩展的支持,例如对于MSP430系列的低功耗模式控制指令。针对硬件的优化,例如内联汇编和特定的处理器指令集,也是其编程语言支持的一部分。开发者可以在编程时充分利用这些特性来编写高效的代码。
4. CCS项目管理与性能优化
4.1 CCS项目创建与版本控制
4.1.1 项目结构和创建步骤
在Code Composer Studio (CCS)中进行项目管理是保持开发效率和团队协作的关键。首先,我们需要了解CCS的项目结构,它是如何组织文件和配置的。
一个典型的CCS项目结构包括: - source 文件夹:存放所有的源代码文件(.c, .cpp, .asm)。 - include 文件夹:存放头文件(.h)。 - output 文件夹:存放编译后生成的文件,如可执行文件(.out)、库文件(.lib)等。 - build 脚本文件:用于自动化构建过程。 - Debug 和 Release 配置文件夹:存放不同编译模式下的项目输出。 - project.pjt 文件:包含项目的配置信息。
在CCS中创建一个新项目的步骤如下: 1. 打开CCS,选择 File > New > CCS Project 。 2. 选择一个项目模板,例如“MSP430 Empty Project”。 3. 填写项目名称并选择项目存放位置。 4. 根据目标微控制器选择对应的设备或系列。 5. 完成向导的剩余步骤,创建项目。
4.1.2 版本控制工具集成
版本控制在软件开发中至关重要,它帮助团队跟踪项目历史,管理多个版本以及协作开发。CCS支持与Git和SVN等版本控制系统集成。
集成版本控制工具的步骤如下: 1. 在项目上点击右键,选择 Team > Share Project... 。 2. 选择版本控制系统,例如Git。 3. 按照向导完成版本控制仓库的创建或连接。 4. 你可以通过 Team 菜单中的选项来执行基本的版本控制操作,如提交、更新、推送等。
4.1.3 项目工作区配置
配置CCS工作区是优化开发流程的一部分。工作区配置文件(.ccxml)保存了调试会话的设置,包括目标设备连接信息、调试器类型和启动脚本等。
配置工作区的步骤如下: 1. 点击工具栏上的 Debug 按钮旁边的小箭头,选择 Debug Configurations 。 2. 右键点击 CCS Debug 并选择 New 来创建一个新的配置。 3. 在 Target 标签页中,设置目标连接信息,包括选择正确的调试器和目标微控制器。 4. 在 Startup 标签页中,配置启动参数,如程序加载地址。 5. 保存配置,并为其命名。
4.2 CCS编译优化与性能分析
4.2.1 编译器优化选项和使用
编译器优化能够显著提升程序性能,减少资源消耗。在CCS中,编译优化选项可以在项目属性中配置。
配置编译优化的步骤如下: 1. 右键点击项目,选择 Properties 。 2. 在左侧导航栏中选择 C/C++ Build > Settings 。 3. 在 Tool Settings 标签页下,选择你的编译器和优化级别。 - 例如, MSP430-GCC C Compiler > Optimization 。 4. 根据需要选择优化级别。常见的优化级别包括: - -O0 :无优化。 - -O1 :优化空间和时间。 - -O2 :进一步优化。 - -O3 :更高级的优化,可能会影响调试。
4.2.2 性能分析工具和功耗测量技巧
性能分析工具帮助开发者识别程序的热点,即程序中占用CPU时间最多的部分。CCS提供了多种性能分析工具,如Code Composer Studio Profiler。
使用性能分析工具的步骤如下: 1. 在项目上点击右键,选择 Profile > Start Profiling 。 2. 运行程序并生成性能数据。 3. 分析性能报告,查看函数调用图和CPU使用情况。 4. 识别并优化代码的热点部分。
测量功耗时,可以使用以下技巧: 1. 利用MSP430的内置计时器和功耗监控模块。 2. 在关键代码段前后读取计时器的值。 3. 计算两次读数之间的差值,以此评估功耗。
代码块示例:
#include <msp430.h>
void main(void) {
WDTCTL = WDTPW | WDTHOLD; // Stop watchdog timer
// Initialize and configure ports
P1DIR |= BIT0; // P1.0 output
P1OUT = 0x00; // Reset P1.0 output
PM5CTL0 &= ~LOCKLPM5; // Disable the GPIO power-on default high-impedance mode
while(1) {
P1OUT ^= BIT0; // Toggle P1.0
__delay_cycles(1000000); // Delay
}
}
分析与参数说明: - WDTCTL = WDTPW | WDTHOLD; :停止看门狗计时器,防止定时复位。 - P1DIR |= BIT0; :将P1.0端口设置为输出。 - P1OUT = 0x00; :初始化P1.0输出为低电平。 - __delay_cycles(1000000); :提供一个延时,此处为1秒(基于时钟频率)。
代码的优化、性能分析和功耗测量技巧是确保嵌入式系统性能的关键环节,了解并掌握这些技巧对于MSP430开发者来说至关重要。
5. MSP430微控制器编程实践
5.1 MSP430低功耗模式操作
5.1.1 各种低功耗模式简介
MSP430微控制器以其卓越的低功耗性能而广受欢迎,在嵌入式系统设计中,能够根据任务的需要优化能耗,从而延长设备的电池寿命。MSP430系列微控制器支持多种低功耗模式,包括活动模式(AM)、等待模式(LPM0)、省电模式(LPM1、LPM2、LPM3)和关闭模式(LPM4)。每种模式都针对不同的能耗需求,将电源管理性能发挥到极致。
- 活动模式(AM):这是MSP430的正常工作模式,在此模式下,CPU运行代码,所有外设正常工作,能耗相对较高。
- 等待模式(LPM0):CPU暂停运行,但所有外设保持工作,总线活动也未停止。这种模式适合等待外部事件。
- 省电模式(LPM1、LPM2、LPM3):在此模式下,CPU被停止,外设的某些部分也可以被关闭以降低功耗。随着进入更深层次的省电模式,供电电压可以降低,进一步减少能耗。
- 关闭模式(LPM4):这是最低功耗模式,几乎所有内部时钟和逻辑都被关闭,只留下最基本的看门狗定时器(WDT)和实时时钟(RTC)等外设处于运行状态。
理解这些模式之间的差异和适用场景是实现有效电源管理的关键。例如,如果一个系统只需要定时唤醒来执行简单的任务,那么配置为LPM3或LPM4模式会是一个好选择,因为它能够实现长时间的电池寿命。相反,如果需要快速响应外部事件,那么选择较浅的省电模式或甚至完全活动模式会更好。
接下来,我们将详细探讨如何通过编程操作这些低功耗模式。
5.1.2 外设接口操作和配置
为了实现低功耗模式的高效运用,必须了解如何配置和操作MSP430的外设接口。这些外设接口包括定时器、串行通信接口、ADC(模拟-数字转换器)以及I/O端口等。在编程实践中,需要仔细规划何时使能这些外设以及如何在不同低功耗模式间进行切换。
首先,我们需要确保在编写代码时,能够根据应用程序的实际需求选择合适的低功耗模式。例如,当一个串行通信任务完成时,我们可以将MSP430置于更深层次的省电模式以降低功耗,而当接收到下一个串行通信任务时,再通过设置相应的中断唤醒设备。
示例代码如下:
#include <msp430.h>
// 唤醒函数,设置为中断服务例程
#pragma vector=PORT1_VECTOR
__interrupt void Port1(void) {
// 处理端口1事件
}
void main(void) {
WDTCTL = WDTPW | WDTHOLD; // 停止看门狗计时器
BCSCTL1 = CALBC1_1MHZ; // 设置DCO为1MHz
DCOCTL = CALDCO_1MHZ;
P1DIR = 0xFF; // 将P1端口设置为输出模式
P1OUT = 0x00; // 清除P1输出
P1IE = 0x01; // 开启P1.0的中断
P1IES = 0x01; // 设置P1.0为高至低的边缘触发
P1IFG = 0x00; // 清除P1的中断标志位
// 进入LPM3模式,关闭CPU和外设时钟,但保留外设如P1的工作
__bis_SR_register(LPM3_bits + GIE);
}
void P1_ISR(void) {
P1OUT ^= BIT0; // 切换P1.0的输出状态
P1IFG = 0x00; // 清除P1的中断标志位
}
在此代码中,我们设置了端口1的一个引脚来触发中断,当该引脚的电平发生变化时,会唤醒设备从LPM3低功耗模式中退出。在退出时,设备将执行中断服务例程(Port1),然后重新进入低功耗模式。这是一个简单但有效的低功耗策略。
为了进一步优化电源管理,MSP430的编程实践还包括监视和调整设备运行的电压和频率,以确保在满足性能需求的同时,消耗最少的能量。实际应用中,这涉及到对DCO(数字控制振荡器)和时钟系统的精细控制,这也是确保在不同的工作场景下达到最佳能源效率的关键。
在本节中,我们对MSP430的低功耗模式有了基本了解,并通过示例代码展示了如何编程控制这些模式。接下来,让我们转向实际的外设编程实例。
5.2 MSP430外设编程实例
5.2.1 典型外设操作编程
在嵌入式系统中,微控制器的外设是处理各种输入输出任务的核心。MSP430系列微控制器提供了丰富的外设接口,如定时器、串行通信接口、ADC和I/O端口等。正确的编程方法可以确保这些外设的高效运行,并在不需要的时候将其置于低功耗状态,这在许多应用中是非常关键的。
下面以一个简单的定时器编程为例,来展示如何利用这些外设来完成特定任务。我们将设置一个定时器,以特定的频率周期性地触发中断,该中断会改变一个LED的状态,演示一个简单的呼吸灯效果。
代码片段:
#include <msp430.h>
void Timer_A_init(void) {
// 设置定时器模式为连续向上计数
TA0CTL = TASSEL_2 | MC_1 | TACLR;
// 设置定时器的周期,这里假设系统时钟为1MHz
// 设定周期为1000个时钟周期,即1ms
TA0CCR0 = 1000 - 1;
// 设置定时器比较模式中断
TA0CCTL0 = CCIE;
// 启动定时器
TA0CTL |= MC_1;
}
void main(void) {
WDTCTL = WDTPW | WDTHOLD; // 停止看门狗计时器
BCSCTL1 = CALBC1_1MHZ; // 设置DCO为1MHz
DCOCTL = CALDCO_1MHZ;
Timer_A_init(); // 初始化定时器A
P1DIR |= 0x01; // 设置P1.0为输出方向
P1OUT &= ~0x01; // 清除P1.0,确保LED初始状态为关闭
__bis_SR_register(LPM0_bits + GIE); // 允许中断并进入低功耗模式
}
// 定时器A比较模式中断服务例程
#pragma vector=TIMER0_A0_VECTOR
__interrupt void Timer_A (void) {
P1OUT ^= 0x01; // 切换P1.0的状态,实现LED呼吸灯效果
}
以上示例代码首先初始化了定时器A0,设置为连续模式,并允许其产生中断。在中断服务例程中,通过切换P1.0引脚的状态来控制LED。由于此代码运行在低功耗模式(LPM0),只有在定时器中断发生时才会唤醒CPU,从而实现节能效果。
这种编程实践的关键在于理解不同外设的特性以及它们之间的交互,以及在编写代码时如何将这些特性运用到低功耗的实现中。通过这种方式,即使是功能复杂的嵌入式应用程序,也能够实现长时间的电池续航。
5.2.2 应用场景分析和编程技巧
在嵌入式系统设计中,外设的编程应用非常广泛。根据应用场景的不同,选择适当的编程技巧和策略是至关重要的。本节将探讨一些常见的应用场景,并给出与之相关的编程技巧。
应用场景一:电池供电的传感器设备
在电池供电的传感器设备中,关键是要最大化电池寿命。例如,一个温湿度传感器可能只需要每隔几分钟唤醒一次,采集数据并发送到主控制器。在大部分时间里,它应该保持在低功耗状态,等待下一个采集周期。
应用场景二:键盘控制器
键盘控制器需要能够快速响应用户的输入。因此,尽管大多数时间设备处于低功耗模式,但当检测到按键时,设备必须能够迅速唤醒并进行处理。在这种情况下,通常会配置中断以允许键盘唤醒CPU。
应用场景三:远程通信设备
在远程通信设备中,通常涉及到无线通信模块,如蓝牙或Wi-Fi模块。由于无线通信模块在传输和接收时功耗较大,因此编程时应尽量减少这种高功耗操作的次数,并在空闲时使模块进入低功耗模式。
编程技巧:
- 中断驱动编程: 通过合理地使用中断来触发任务,可以在不需要CPU持续运行的情况下完成工作,这样可以在大部分时间里将设备置于低功耗模式。
- 定时器使用: 定时器可以用于控制设备的唤醒时间,从而在必要的时候执行任务。例如,定时器中断可以用来处理周期性的任务,如读取传感器数据。
- 低功耗优化: 仔细分析和优化代码,避免不必要的CPU负载,通过精简算法和数据处理来降低功耗。
在实际开发中,应根据具体的应用需求选择合适的编程方法,并结合MSP430微控制器的特点,以达到低功耗运行的目的。通过不断的实践和测试,我们可以找到最合适的编程实践和优化策略,以实现嵌入式应用的高效运行和节能。
通过以上的实践和分析,我们可以看到,MSP430微控制器编程实践不仅涉及到具体的代码编写,还涉及到深入理解低功耗设计原则,并将其应用到实际的应用场景中。这些技巧和方法对于开发高效的嵌入式应用至关重要。
6. CCS调试工具和高级编程技巧
在上一章节中,我们深入了解了CCS项目管理以及如何进行性能优化。这一章,我们将深入探讨CCS调试工具的使用方法,并介绍一些高级编程技巧,如RTOS和多线程编程。
6.1 CCS调试工具使用和问题诊断
调试是开发过程中不可或缺的环节,CCS提供了一系列强大的调试工具来帮助开发者定位和解决问题。
6.1.1 调试工具介绍和设置
CCS支持多种调试模式,包括但不限于在线仿真、硬件调试以及远程调试等。调试工具的设置通常在创建项目后,通过配置选项进行。
// 示例代码:用于演示如何在代码中设置断点
int main(void) {
WDTCTL = WDTPW + WDTHOLD; // 停止看门狗定时器
// 在这里可以添加断点
return 0;
}
- 在代码中设置断点,通常右击代码行数旁的空白区域,选择“Toggle Breakpoint”。
- 调试配置可以在 CCS 菜单栏的“Run” -> “Debug Configurations...”进行详细设置。
6.1.2 常见问题诊断和解决方法
在开发过程中,我们会遇到各种问题。借助CCS的调试工具,我们可以有效地诊断并解决问题。
- 当程序运行异常或响应不符合预期时,首先使用“Step Over”和“Step Into”命令逐步跟踪程序执行。
- 利用“Memory Browser”和“Variable Watch”监控变量值和内存状态。
- 在遇到程序挂起或崩溃时,检查调用栈和寄存器状态,这有助于找出程序执行流的异常点。
6.2 CCS高级主题:RTOS和多线程编程
高级编程技巧能让我们在开发复杂应用时更加得心应手。本节将介绍实时操作系统RTOS的集成以及多线程编程实践。
6.2.1 实时操作系统集成
RTOS为嵌入式系统提供了一个可预测的执行环境,可以用于任务调度、同步和通信等。
- 在CCS中集成RTOS,如FreeRTOS,首先需要从官方网站下载相应的库文件,并将其添加到你的项目中。
- 配置RTOS需要修改系统配置文件,通常为FreeRTOSConfig.h,以便根据你的硬件和需求进行优化。
// 示例代码:FreeRTOS任务创建
void vTaskFunction(void *pvParameters) {
for (;;) {
// Task code goes here.
}
}
int main(void) {
// 创建任务
xTaskCreate(vTaskFunction, "Task", 128, NULL, 1, NULL);
// 启动调度器
vTaskStartScheduler();
}
6.2.2 多线程编程实践与挑战
多线程编程可以提高程序的并行处理能力和响应速度,但同时也引入了线程同步和竞争条件等问题。
- 在MSP430上使用多线程,你可以通过创建多个任务来实现。每个任务都应实现其独立的功能。
- 在编程时,要特别注意共享资源的保护,避免竞争条件。使用互斥锁、信号量等同步机制来控制对共享资源的访问。
// 示例代码:使用互斥锁防止竞争条件
SemaphoreHandle_t xMutex;
void task1(void *pvParameters) {
while (1) {
if (xSemaphoreTake(xMutex, portMAX_DELAY) == pdTRUE) {
// 临界区代码,执行独占访问
xSemaphoreGive(xMutex);
}
}
}
void task2(void *pvParameters) {
while (1) {
if (xSemaphoreTake(xMutex, portMAX_DELAY) == pdTRUE) {
// 临界区代码,执行独占访问
xSemaphoreGive(xMutex);
}
}
}
在进行多线程编程时,开发者要小心处理线程间的协作与通信,确保整体的运行效率与稳定性。
结束语
本章我们学习了CCS调试工具的使用和问题诊断技巧,同时也探索了RTOS集成和多线程编程的高级主题。这些知识能帮助开发者更高效地开发出稳定且功能丰富的嵌入式应用。在下一章节,我们将继续深入了解MSP430微控制器的更多高级特性与实践技巧。
简介:Code Composer Studio (CCS) 是德州仪器(TI)推出的集成开发环境,专注于MSP430系列微控制器的嵌入式应用开发。本指南提供了CCS v6.1版本在MSP430开发中的详细指导,包括开发工具链的使用、项目创建与管理、编程与编译过程、调试技巧,以及如何利用MSP430的低功耗模式和外设接口等特定功能。文档还涉及高级主题,如RTOS集成和多线程编程,旨在帮助开发者提升专业技能,高效开发嵌入式系统。

















 529
529

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









