






 本文详细介绍了从双目坐标系到云台坐标系的转换过程,包括坐标系定义、变换矩阵的确定。重点讲解了双目坐标系中左摄像机光心为原点,Z+方向及云台坐标系中X+方向的定义。通过坐标变换矩阵,实现了从相机坐标到云台坐标的转换。此外,还提及了单片机如STM32在执行操作中的应用,以及云台舵机的标定和目标跟踪功能的优化。
本文详细介绍了从双目坐标系到云台坐标系的转换过程,包括坐标系定义、变换矩阵的确定。重点讲解了双目坐标系中左摄像机光心为原点,Z+方向及云台坐标系中X+方向的定义。通过坐标变换矩阵,实现了从相机坐标到云台坐标的转换。此外,还提及了单片机如STM32在执行操作中的应用,以及云台舵机的标定和目标跟踪功能的优化。
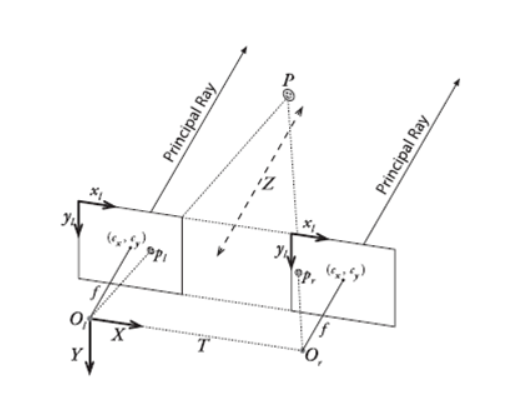
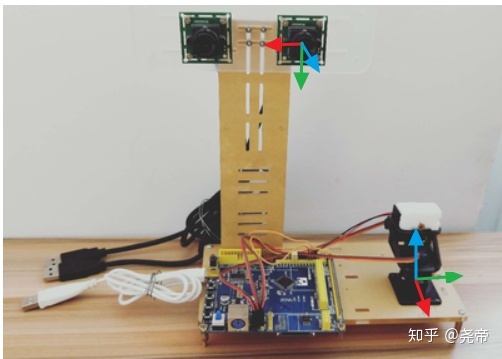
1.确定坐标系,图中RGB分别对应XYZ。
1.1 双目坐标系原点位于左摄像机光心,注意'左'是沿着摄像头采集图像的方向看哦,光心射出的方向为Z+,另外光心这东西无法精准定位,本demo中为臆测,。
1.2 云台坐标系原点为基座舵机旋转轴中心,沿着激光射出的方向为X+。
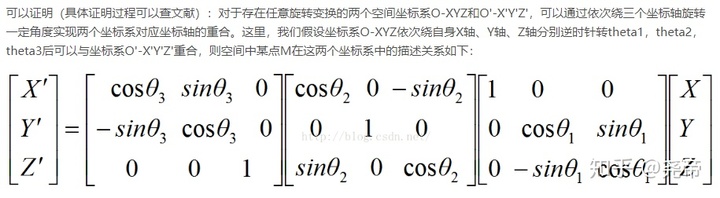
2.如何确定变换矩阵
坐标点变换的思路为: 双目获区坐标位置CamPos -> 矩阵变换 ->云台坐标系ServoPos。
servoPos = camFrame2ServoFrame*camPos
我们要求相机坐标系到云台坐标系的变换,按照下面的规则:
Mat camPosMat = (Mat_ < float>(4, 1) << camPos[0], camPos[1], camPos[2], 1);
//先绕自身坐标系X逆时针旋转90°
Mat rotateX_90 = (Mat_<double>(3, 3) << 1, 0, 0,
0, 0, 1,
0, -1, 0);
//在上一步旋转后的坐标系基础上,再绕坐标系Z逆时针旋转90°
Mat rotateZ_90 = (Mat_<double>(3, 3) << 0, 1, 0,
-1, 0, 0,
0, 0, 1);
Mat rotation = rotateZ_90*rotateX_90;
//平移向量为手动量取
Mat camFrame2ServoFrame = (Mat_<float>(4, 4) <<
rotation.at<double>(0, 0), rotation.at<double>(0, 1), rotation.at<double>(0, 2), 15,
rotation.at<double>(1, 0), rotation.at<double>(1, 1), rotation.at<double>(1, 2), -90,
rotation.at<double>(2, 0), rotation.at<double>(2, 1), rotation.at<double>(2, 2), 135,
0, 0, 0, 1);
Mat objPosMat = camFrame2ServoFrame*camPosMat;
//发送指令给云台
int x = objPosMat.at<float>(0, 0);//float 型
int y = objPosMat.at<float>(1, 0);
int z = objPosMat.at<float>(2, 0);
至此,变换后坐标计算完毕。
后续有需要我会写一下坐标系变换与工业机器人中坐标系的概念。
感觉此专栏的重点都写完了,剩下的是单片机端的执行操作,除了使用STM32外,arduino和树莓派都可以作为执行单元。如果有需要STM32代码的同学可以私信我。
还有一些制作细节说明一下:
- 云台舵机旋转角度和PWM的占空比需要标定,即确定占空比与舵机旋转角度的函数关系,两个舵机的关系可能不一样。
- 可以添加目标跟踪的代码让激关照射动作更加平滑。
PS:有想复制本demo的同学可以私信我,我可以发亚克力板加工图和材料选型给你们。

















 2181
2181

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









