







梁政:机器人工程师进阶之路(六)旋量法(上)zhuanlan.zhihu.com
 梁政:机器人工程师进阶之路(七)旋量法(下)zhuanlan.zhihu.com
梁政:机器人工程师进阶之路(七)旋量法(下)zhuanlan.zhihu.com
 。通过螺旋轴可以将坐标系变换矩阵T矩阵
。通过螺旋轴可以将坐标系变换矩阵T矩阵


 。
。

从上两篇我们可以了解到,利用旋量法可以在螺旋运动中获得螺旋轴(screw axis)
转化为指数形式
其中
另外,和T矩阵的左乘右乘一样,要区分当前坐标系是相对于固定坐标系{S}变换还是自身坐标系{B}变换。而且两者之间的螺旋轴的变换关系为
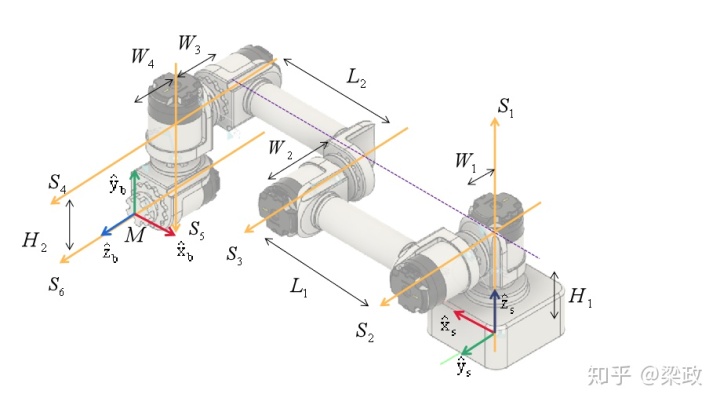
根据这些,我试着给Innfos-Gluon建个模。之前的DH法,按着自己的想法去建立模型,到后面的计算变得很复杂。所以还是太年轻,这次我就不给自己添加难度了,模仿大佬们的模型建立吧。
Gluon模型
我们设定基坐标系为固定坐标系{s},末端坐标系{b}。确定好各关节轴线,以及坐标系原点为轴线相交点,类似于DH法。并在{s}下,确定末端位姿T矩阵为M。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1007
1007











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









