






Abstract
一般嵌入式開發板,會提供parallel port讓你操錄Bootloader,但目前NB幾乎已經不提供parallel port了,那要怎麼使用NB燒錄Bootloader呢?
Introduction
一般人會去買USB to parallel的轉接線,讓NB可以接parallel port,這當然是可行的方法,不過通常為了debug,還會去買ICE,本文介紹使用ICE來燒錄Bootloader,這樣就可以省下USB to parallel轉接線的費用了。
1.安裝Banyan-UE-1.8.7b.exe
2.重開機
3.開機後執行Banyan-UE
4.執行FlashWrite-V0.4.6a.exe
5.Load Configuration ....example/PXA270.cfg
6.Initialize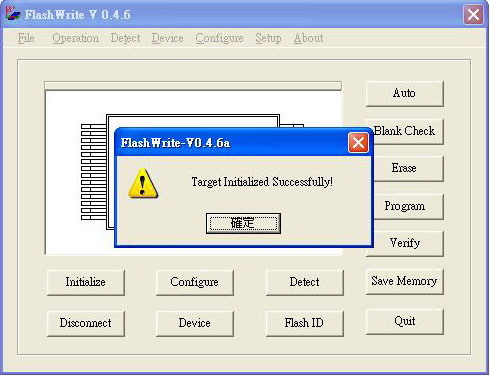
7.Detect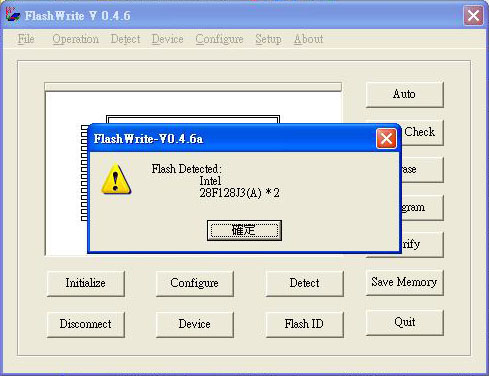
8.Erase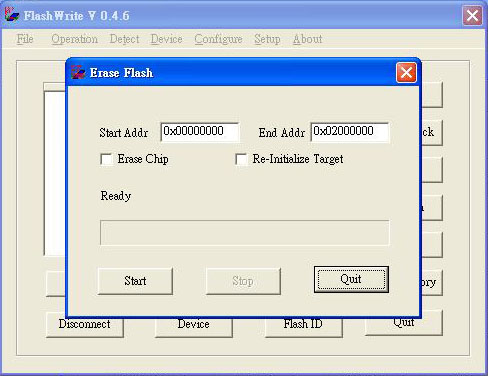
9.Program (0x00000000) (pxa270V093/WinCE5.0/EBOOT.nb0)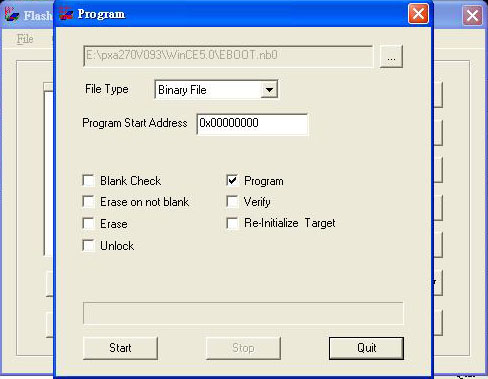
10.執行dnw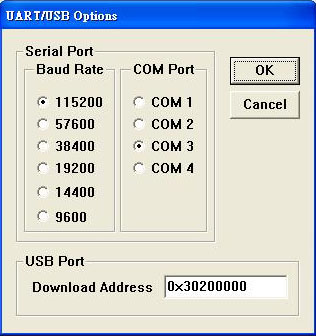
11.Configuration->Option (COM3) (115200) (0x30200000)
12.SerialPort->Connect 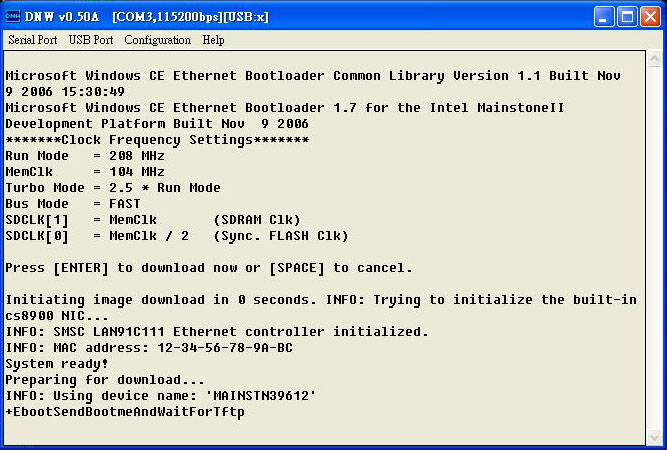
出現以上的debug畫面,就代表Bootloader燒錄成功了。















 633
633











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









