







目录
一 图像变换与平面坐标系的关系
二 平面坐标系与齐次坐标系
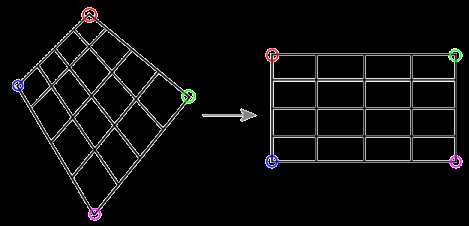
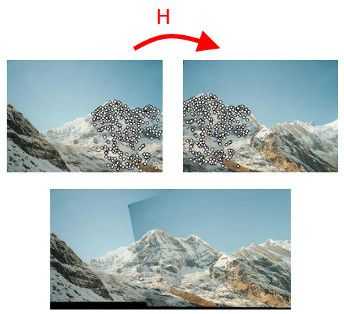
三 单应性变换
一 图像变换与平面坐标系的关系
旋转:

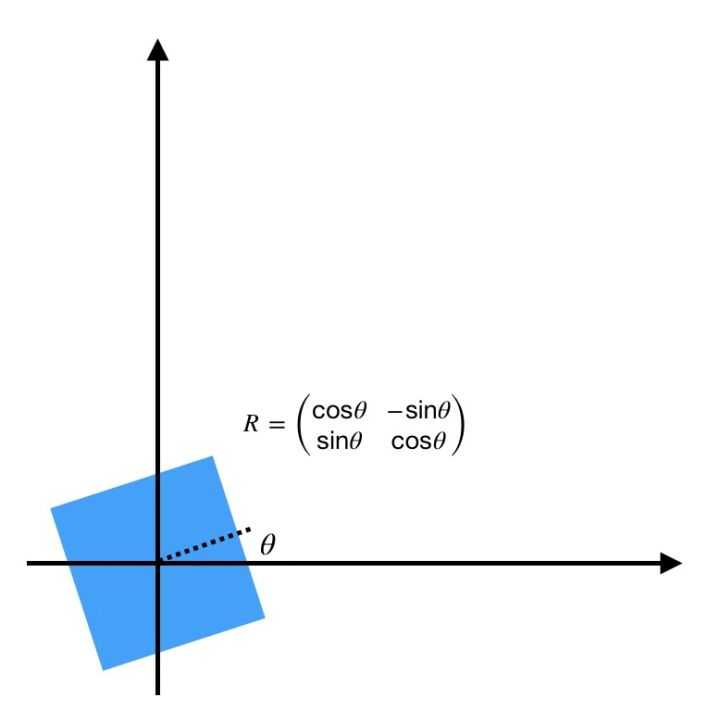
写成矩阵乘法形式:

平移:
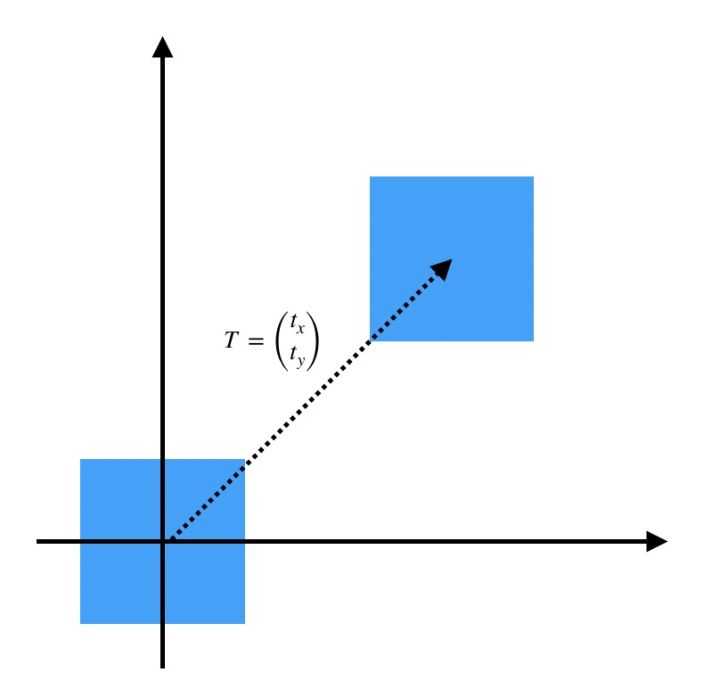

但是现在遇到困难了,平移无法写成和上面旋转一样的矩阵乘法形式。所以引入齐次坐标
,再写成矩阵形式:

其中
表示单位矩阵,而
表示平移向量。
那么就可以把把旋转和平移统一写在一个矩阵乘法公式中,即刚体变换:

而旋转矩阵
是正交矩阵(
)。
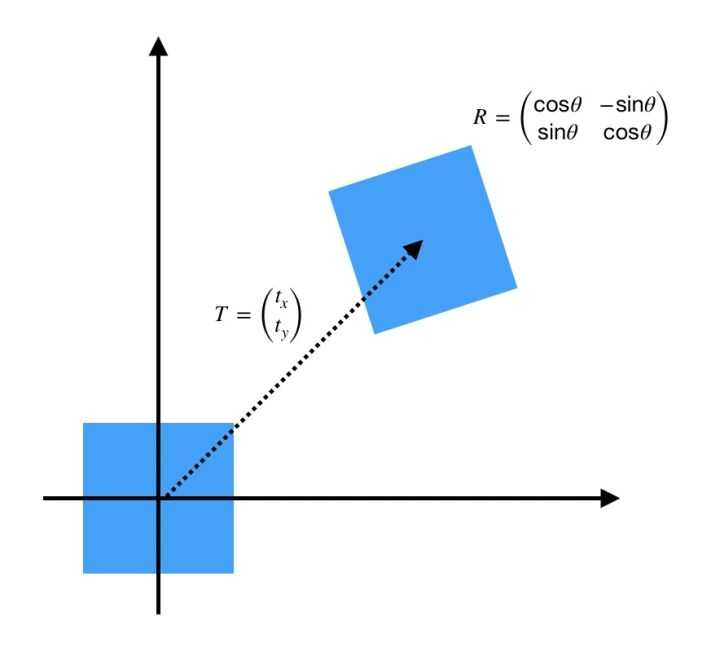
刚体变换:旋转+平移(正方形-正方形)
作用:z轴距离不变 x y 和原来相等
仿射变换
作用:z轴距离不变 x y 各自被比例拉伸

其中
可以是任意2x2矩阵(与
一定是正交矩阵不同)。
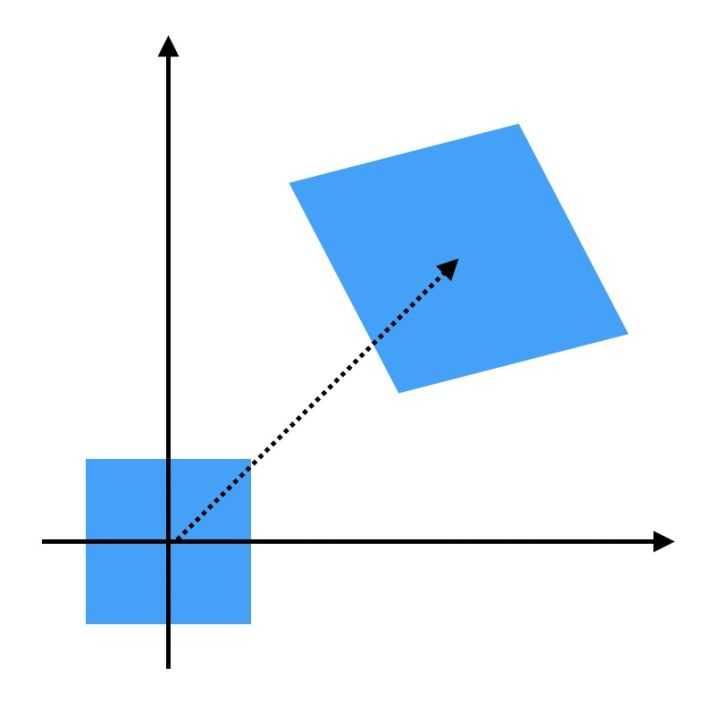
仿射变换(正方形-平行四边形)
可以看到,相比刚体变换(旋转和平移),仿射变换除了改变目标位置,还改变目标的形状,但是会保持物体的“平直性”。
不同
和
矩阵对应的各种基本仿射变换:
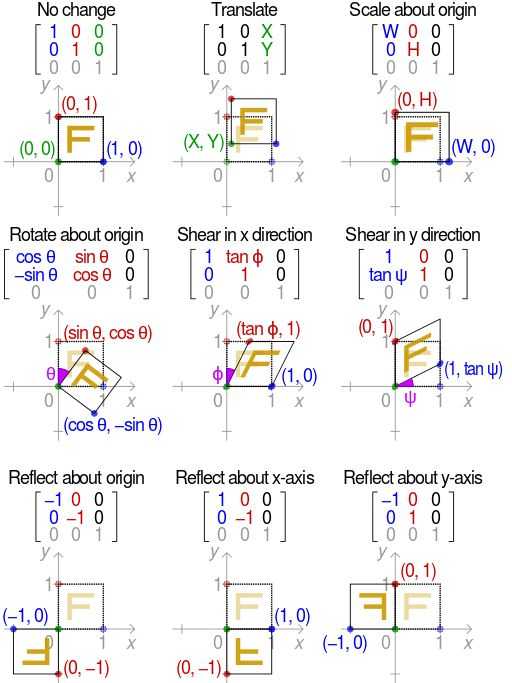
仿射变换(正方形-平行四边形)
可以看到,相比刚体变换(旋转和平移),仿射变换除了改变目标位置,还改变目标的形状,但是会保持物体的“平直性”。
不同
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章















 5490
5490











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









