







ORB是是ORiented Brief的简称。ORB的描述在下面文章中:
Ethan Rublee and Vincent Rabaud and Kurt Konolige and Gary Bradski, ORB: an efcient alternative to SIFT or SURF, ICCV 2011
没有加上链接是因为作者确实还没有放出论文,不过OpenCV2.3RC中已经有了实现,WillowGarage有一个talk也提到了这个算法,因此我不揣浅陋,在这里总结一下。
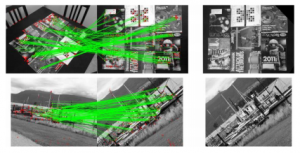
Brief是Binary Robust Independent Elementary Features的缩写。这个特征描述子是由EPFL的Calonder在ECCV2010上提出的。主要思路就是在特征点附近随机选取若干点对,将这些点对的灰度值的大小,组合成一个二进制串,并将这个二进制串作为该特征点的特征描述子。详细算法描述参考如下论文:
注意在BRIEF eccv2010的文章中,BRIEF描述子中的每一位是由随机选取的两个像素点做二进制比较得来的。文章同样提到,在此之前,需要选取合适的gaussian kernel对图像做平滑处理。(为什么要强调这一点,因为下述的ORB对此作了改进。)
BRIEF的优点在于速度,缺点也相当明显:
1:不具备旋转不变性。
2:对噪声敏感
3:不具备尺度不变性。
ORB就是试图解决上述缺点中的1和2.
如何解决旋转不变性:
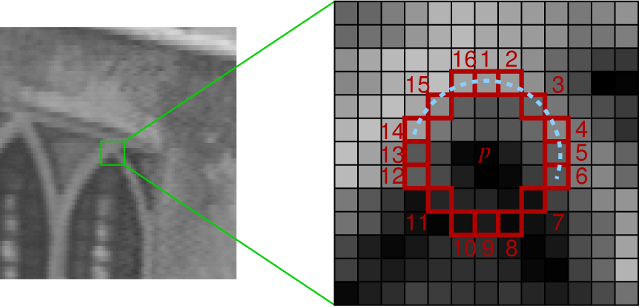
在ORB的方案中,是采用了FAST作为特征点检测算子。FAST应用的很多了,是出名的快,以防有人不知道,请看这里:
在Sift的方案中,特征点的主方向是由梯度直方图的最大值和次大值所在的bin对应的方向决定的。略嫌耗时。
在ORB的方案中,特征点的主方向是通过矩(moment)计算而来,公式如下:

有了主方向之后,就可以依据该主方向提取BRIEF描述子。但是由此带来的问题是,由于主方向会发生变化,随机点对的相关性会比较大,从而降低描述子的判别性。解决方案也很直接,采取贪婪的,穷举的方法,暴力找到相关性较低的随机点对。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









