






自动驾驶汽车可能仍然难以理解人类和垃圾桶之间的区别,但这并没有使最先进的物体检测模型在过去十年中取得的惊人进步相去甚远。
将其与 OpenCV 等库的图像处理能力相结合,如今在数小时内构建实时对象检测系统原型要容易得多。在本指南中,我们将尝试向您展示如何开发用于简单对象检测应用程序的子系统,以及如何将所有这些组合在一起。
我知道你们中的一些人可能会想,为什么我们要使用Python,在某种程度上,它对于实时应用程序来说不是太慢了吗。
大多数计算重操作,如预测或图像处理,都是通过PyTrand和OpenCV来执行的,它们都使用C++在场景后面实现这些操作,因此,如果我们在这里使用C++或Python,则不会有太大的差别。
读取视频流
输入的视频源可以是任何内容,从网络摄像头读取,或解析现有视频,或从连接到网络的外部摄像头。在此示例中,我们将展示如何从 youtube 或网络摄像头读取视频流。
从YouTube读取
你们可能不想出去创建新视频,而是使用许多在线可用的视频。在这种情况下,你们可以从 youtube 读取视频流。
从网络摄像头读取
读取IP摄像头
如果你们正在构建将部署在服务器上的应用程序,摄像机拥有一个自己的 IP 地址,你可以从中访问视频流。
加载模型
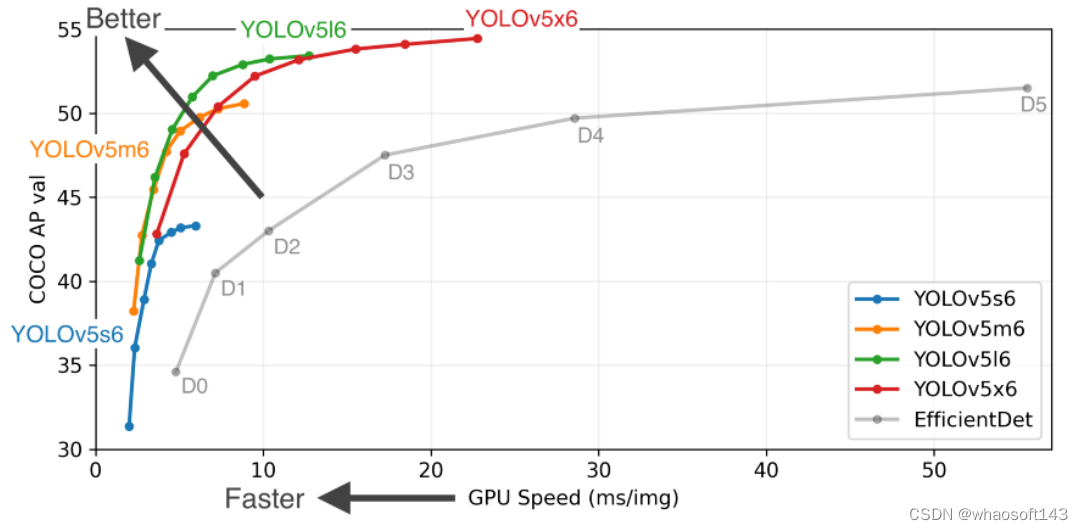
有许多不错的对象检测模型,每个模型都有其优点和缺点。为了简单起见,我们将使用YoloV5,因为它为我们提供了对我们的实时应用程序至关重要的快速应用。你们还可以查看其他模型,例如 FasterRCNN。
我们可以直接从 PyTorch hub 加载模型,第一次运行代码可能需要几分钟,因为它会从互联网上下载模型,但下次它将直接从磁盘加载。
单帧评分
我们可以说“解析一个视频流,从一帧开始”。那么让我们看看如何对单个帧进行评分和解析。我们用来执行应用的设备对我们的应用速度产生了巨大的影响,现代深度学习模型在使用 GPU 时效果最好,因此如果你们有一个带有 CUDA 内核的 GPU,它将大大提高您的性能。根据经验,即使是单个 GPU 的系统也可以达到每秒 45-60 帧,而 CPU 最多只能提供 25-30 帧。
绘制试别对象及框架
一旦我们对帧进行了评分,在将帧写入输出流之前,我们需要在帧上绘制识别的对象及其框。为此,我们可以使用 OpenCV 的图像处理工具包。
输出
整合
现在我们将它们整合到一个调用函数中,在循环中执行整个操作,让我们回顾一下我们的主要功能必须执行以成功运行应用程序的步骤。
- 创建视频流输入。
- 加载模型。
- 当输入可用时,阅读下一帧。
- 对框架进行评分以获取标签和坐标。
- 在检测到的对象上绘制框。
- 将处理后的帧写入输出视频流。
你们应该将所有这些组件打包到一个类中,该类可以与你们希望将输出流写入其中的 URL 和输出文件一起调用。最终效果如下:
当然,生产级实时应用程序比这复杂得多,但本文并不打算教授这一点。它是为了展示 Python 的惊人力量,它使我们能够在数小时内构建如此复杂的应用程序原型。
Github代码链接:https://github.com/akash-agni















 2743
2743

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









